基于重复轨道InSAR的DEM高频更新方法及设备
本技术涉及地形监测,尤其涉及一种基于重复轨道insar的dem高频更新方法及设备。
背景技术:
1、数字高程模型在众多实际应用中具有重要作用,包括土木工程、城市规划、地形测绘和滑坡监测等。对于在高扰动区域的应用场景下,地表数字高程模型(dem,digitalelevation model)的时效性至关重要,比如在对露天矿山进行开采量监测时,需要通过对露天矿山的dem进行更新来获取对应时段内的矿石开采量。目前用于生成大范围dem的技术手段主要包括光学摄影测量和干涉合成孔径雷达(insar,interferometric syntheticaperture radar)。然而,光学摄影测量易受雨雾等天气影响,致使其难以对dem产品进行高频更新。相比之下,insar技术以其独有的历史回溯,全天候,全天时,高时空分辨率等特点在dem生产以及更新方面具有更大的优势。
2、根据卫星成像模式的不同,insar生成dem的方法可分为两类:1)单轨双天线模式,比如利用terrasar-x与tandem-x双星编队飞行下的bistatic模式获取的tandem-x dem、航天飞机雷达地形测绘任务(srtm,shuttle radar topography mission);2)重轨干涉模式。对于单轨双天线模式而言,其获取的干涉相位受大气、时间失相干的影响较小,所生成的dem产品精度较高。然而,该模式下的卫星重访周期较长,难以保证dem产品的时效性。相比之下,重轨模式下的卫星重访周期较短(sentinel-1卫星可提供间隔为6天的合成孔径雷达(sar,synthetic aperture radar)影像)且可用数据较多。同时,随着未来重轨卫星的继续发展,该类型的数据量将愈加丰富,这为dem产品的时效性提供了保障。因此,若能充分挖掘重轨insar数据更新dem的潜力,则可能实现大范围dem产品的高频次更新。
3、然而,重轨模式下获取的地形相位易受大气、地表形变等因素的影响。有学者通过时序insar技术从干涉相位中估计出形变相位以及dem残差相位。利用高程残差信息便可对外部dem进行更新校正。而后,为提高dem残差校正能力,国内外学者在传统差分干涉测量短基线集时序分析(sbas-insar,small baseline subset insar)技术的基础上开展了很多研究。然而,此类方法通常将地形参数设为常数,且目前的研究中,几乎都是利用较长时段内获取的雷达观测数据进行解算,在高扰动场景下,长时序下所重构出的dem时效性很差,而短时序下所估计出的地形参数由于多余观测较少导致易受噪声干扰,存在短时序下dem更新的准确性低的问题。
技术实现思路
1、本技术实施例提供了一种基于重复轨道insar的dem高频更新方法及设备,可以解决短时序下dem更新的准确性低的问题。
2、第一方面,本技术实施例提供了一种基于重复轨道insar的dem高频更新方法,该基于重复轨道insar的dem高频更新方法包括:
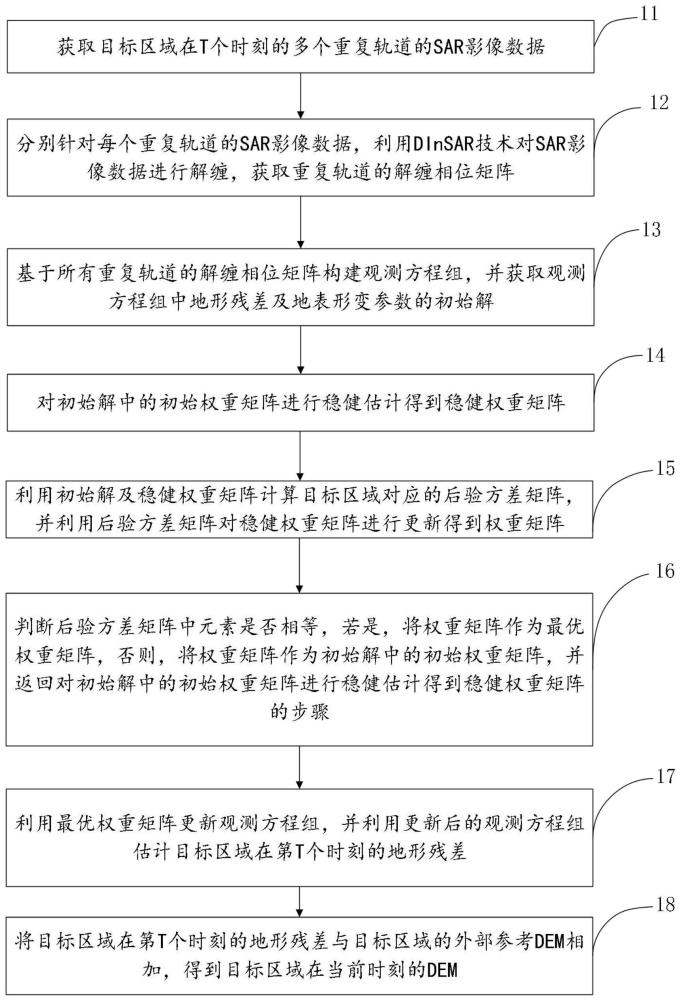
3、获取目标区域在t个时刻的多个重复轨道的sar影像数据;sar影像数据包括多个观测相位的sar影像,第t个时刻为当前时刻;
4、分别针对每个重复轨道的sar影像数据,利用dinsar技术对sar影像数据进行解缠,获取重复轨道的解缠相位矩阵;
5、基于所有重复轨道的解缠相位矩阵构建观测方程组,并获取观测方程组中地形残差及地表形变参数的初始解;
6、对初始解中的初始权重矩阵进行稳健估计得到稳健权重矩阵;
7、利用初始解及稳健权重矩阵计算目标区域对应的后验方差矩阵,并利用后验方差矩阵对稳健权重矩阵进行更新得到权重矩阵;
8、判断后验方差矩阵中元素是否相等,若是,将权重矩阵作为最优权重矩阵,否则,将权重矩阵作为初始解中的初始权重矩阵,并返回对初始解中的初始权重矩阵进行稳健估计得到稳健权重矩阵的步骤;
9、利用最优权重矩阵更新观测方程组,并利用更新后的观测方程组估计目标区域在第t个时刻的地形残差;
10、将目标区域在第t个时刻的地形残差与目标区域的外部参考dem相加,得到目标区域在当前时刻的dem。
11、可选的,地形残差与地表形变参数的初始解为:
12、
13、p=[p1,...,pi,...,pn]
14、其中,表示地形残差与地表形变参数,p表示地形残差与地表形变参数的初始解的初始权重矩阵,p1表示第1个重复轨道的初始观测相位权重矩阵,pi表示第i个重复轨道的初始观测相位权重矩阵,pn表示第n个重复轨道的初始观测相位权重矩阵,i=1,2,...,n,n表示重复轨道的总数,()t表示矩阵的转置运算,表示参数矩阵,表示参数与解缠相位之间的转换关系矩阵,bgeo表示投影转换矩阵,表示所有重复轨道的解缠相位矩阵。
15、可选的,对初始解中的初始权重矩阵进行稳健估计得到稳健权重矩阵,包括:
16、通过公式:
17、
18、计算第i个重复轨道的观测残差向量矩阵vi;
19、其中,vi=[vi,1,...,vi,r,...,vi,r],vi,1表示第i个重复轨道的第1个观测相位的观测残差向量,vi,r表示第i个重复轨道的第r个观测相位的观测残差向量,vi,r表示第i个重复轨道的第r个观测相位的观测残差向量,r=1,2,...,r,r表示观测相位的总数,表示第i个重复轨道的参数矩阵,表示地形残差与地表形变参数的初始解,表示第i个重复轨道的解缠相位矩阵;
20、通过公式:
21、
22、
23、计算第i个重复轨道的标准化观测残差向量矩阵
24、其中,ξ表示稳健估计参数,median()表示计算中值,表示第i个重复轨道的第1个观测相位的标准观测残差,表示第i个重复轨道的第r个观测相位的标准观测残差,表示第i个重复轨道的第r个观测相位的标准观测残差;
25、通过公式:
26、
27、计算第i个重复轨道的第r个观测相位的稳健相位权重
28、其中,pi,r表示第i个重复轨道的第r个观测相位的初始观测相位权重,pi,r∈pi,k0和k1均为常数,且k0<k1;
29、获取稳健权重矩阵
30、其中,表示第1个重复轨道的稳健观测相位权重矩阵,表示第1个重复轨道的第1个观测相位的稳健观测相位权重,表示第1个重复轨道的第r个观测相位的稳健观测相位权重,表示第1个重复轨道的第r个观测相位的稳健观测相位权重,表示第i个重复轨道的稳健观测相位权重矩阵,表示第i个重复轨道的第1个观测相位的稳健观测相位权重,表示第i个重复轨道的第r个观测相位的稳健观测相位权重,表示第n个重复轨道的稳健观测相位权重矩阵,表示第n个重复轨道的第1个观测相位的稳健观测相位权重,表示第n个重复轨道的第r个观测相位的稳健观测相位权重,表示第n个重复轨道的第r个观测相位的稳健观测相位权重。
31、可选的,利用初始解及稳健权重矩阵计算目标区域对应的后验方差矩阵,包括:
32、通过公式:
33、
34、计算目标区域对应的后验方差矩阵
35、其中,表示第1个重复轨道的观测残差向量的后验方差,表示第2个重复轨道的观测残差向量的后验方差,表示第n个重复轨道的观测残差向量的后验方差,v1表示第1个重复轨道的观测残差向量矩阵,vn表示第n个重复轨道的观测残差向量矩阵,j=1,2,...,n,s1,1、s1,n、si,1、si,i、si,n、sn,1和sn,n均表示后验方差参数:
36、si,i=ni-2tr(n-1ni)+tr(n-1nin-1ni)
37、si,j=ni-tr(n-1nin-1nj)
38、
39、n=n1+n2+...+nn
40、其中,ni表示ni中的第i个矩阵元素,tr()表示矩阵求迹,n表示法方程系数矩阵,ni表示第i个重复轨道对应的法方程系数矩阵,nj表示第j个重复轨道对应的法方程系数矩阵,表示第i个重复轨道对应的系数矩阵,n1表示第1个重复轨道对应的法方程系数矩阵,n2第2个重复轨道对应的法方程系数矩阵,nn表示第n个重复轨道对应的法方程系数矩阵,n=[n1,...,nn]。
41、可选的,利用后验方差矩阵对稳健权重矩阵进行更新得到权重矩阵,包括:
42、通过公式:
43、
44、对初始权重矩阵中的元素进行更新,并得到权重矩阵
45、其中,表示第1个重复轨道的观测相位权重矩阵,表示第i个重复轨道的观测相位权重矩阵,表示第n个重复轨道的观测相位权重矩阵。
46、可选的,利用更新后的观测方程组估计目标区域在第t个时刻的地形残差,包括:
47、通过公式:
48、
49、计算得到形变参数向量矩阵和第t个时刻的地形残差δh;
50、其中,表示参数矩阵,表示参数与解缠相位之间的转换关系矩阵,bgeo表示投影转换矩阵,p*表示最优权重矩阵,表示所有重复轨道的解缠相位矩阵,()t表示矩阵的转置运算。
51、可选的,利用dinsar技术对sar影像数据进行解缠,获取重复轨道的解缠相位矩阵,包括:
52、利用dinsar技术生成sar影像数据中的多个干涉对;
53、利用目标区域的外部参考dem,分别针对每个干涉对进行差分处理,获取差分干涉对;
54、对差分干涉对进行解缠,得到解缠相位,并获取重复轨道的解缠相位矩阵。
55、可选的,基于所有重复轨道的解缠相位矩阵构建观测方程组,包括:
56、基于所有重复轨道的解缠相位矩阵,构建相位与地形残差及地表形变参数之间的观测方程:
57、
58、其中,b1表示第1个重复轨道的系数矩阵,bn表示第n个重复轨道的系数矩阵,(m′×13)、((4n+1)×1)和(m′×1)均表示矩阵维度,m′表示n个重复轨道的差分干涉对总数,表示形变参数向量矩阵,表示第1个重复轨道的形变参数向量,表示第2个重复轨道的形变参数向量,表示第n个重复轨道的形变参数向量,[]t表示矩阵的转置运算,δ(m′×1)表示残余相位,表示第1个重复轨道的解缠相位矩阵,表示第1个重复轨道的第1个差分干涉对的解缠相位,表示第1个重复轨道的第2个差分干涉对的解缠相位,表示第1个重复轨道的第l个差分干涉对的解缠相位,表示第n个重复轨道的解缠相位矩阵,表示第n个重复轨道的第1个差分干涉对的解缠相位,表示第n个重复轨道的第2个差分干涉对的解缠相位,表示第n个重复轨道的第l个差分干涉对的解缠相位;
59、分别针对多个重复轨道中的每个重复轨道,将重复轨道对应的雷达视线方向形变参数向量投影到东西向和垂直向,并得到观测方程组为:
60、
61、其中,(m′×(2n+1))、((2n+1)×5)和(5×1)均表示矩阵维度,表示地形残差与地表形变参数,表示垂直向的形变平均速率,表示东西向的形变平均速率,表示垂直向的形变加速度,表示东西向的形变加速度,表示所有重复轨道的解缠相位矩阵,表示参数与解缠相位之间的转换关系矩阵,bgeo表示投影转换矩阵:
62、
63、
64、其中,θ1表示第1个重复轨道上卫星的入射角,θ2表示第2个重复轨道上卫星的入射角,α1表示第1个重复轨道卫星的飞行方位角,α2表示第2个重复轨道卫星的飞行方位角,cosθ1表示第1个重复轨道上卫星斜距向与地表垂直向之间的投影关系,cosθ2表示第2个重复轨道上卫星斜距向与地表垂直向之间的投影关系,-sinθ1cosα1表示第1个重复轨道上卫星斜距向与地表东西向之间的投影关系,-sinθ2csoα2表示述第2个重复轨道上卫星斜距向与地表东西向之间的投影关系。
65、第二方面,本技术实施例提供了一种基于重复轨道insar的dem高频更新装置,包括:
66、获取模块,获取目标区域在t个时刻的多个重复轨道的sar影像数据;sar影像数据包括多个观测相位的sar影像,第t个时刻为当前时刻;
67、解缠模块,用于分别针对每个重复轨道的sar影像数据,利用dinsar技术对sar影像数据进行解缠,获取重复轨道的解缠相位矩阵;
68、构建模块,用于基于所有重复轨道的解缠相位矩阵构建观测方程组,并获取观测方程组中地形残差及地表形变参数的初始解;
69、计算模块,用于对初始解中的初始权重矩阵进行稳健估计得到稳健权重矩阵;
70、更新模块,利用初始解及稳健权重矩阵计算目标区域对应的后验方差矩阵,并利用后验方差矩阵对稳健权重矩阵进行更新得到权重矩阵;
71、判断模块,判断后验方差矩阵中元素是否相等,若是,将权重矩阵作为最优权重矩阵,否则,将权重矩阵作为初始解中的初始权重矩阵,并返回对初始解中的初始权重矩阵进行稳健估计得到稳健权重矩阵的步骤;
72、估计模块,利用最优权重矩阵更新观测方程组,并利用更新后的观测方程组估计目标区域在第t个时刻的地形残差;
73、相加模块,用于将目标区域在第t个时刻的地形残差与目标区域的外部参考dem相加,得到目标区域在当前时刻的dem。
74、第三方面,本技术实施例提供了一种终端设备,包括存储器、处理器以及存储在存储器中并可在处理器上运行的计算机程序,该处理器执行上述计算机程序时实现上述的基于重复轨道insar的dem高频更新方法。
75、第四方面,本技术实施例提供了一种计算机可读存储介质,该计算机可读存储介质存储有计算机程序,该计算机程序被处理器执行时实现上述的基于重复轨道insar的dem高频更新方法。
76、本技术的上述方案有如下的有益效果:
77、在本技术的实施例中,通过获取目标区域在t个时刻的多个重复轨道的sar影像数据,然后分别针对每个重复轨道的sar影像数据,利用dinsar技术对sar影像数据进行解缠,获取重复轨道的解缠相位矩阵,再基于所有重复轨道的解缠相位矩阵构建观测方程组,能够提高观测方程组所包含的数据量,进而提升观测方程组的准确性,然后获取观测方程组中地形残差与地表形变参数的初始解,对初始解中的初始权重矩阵进行稳健估计得到稳健权重矩阵,再利用初始解及稳健权重矩阵计算目标区域对应的后验方差矩阵,并利用后验方差矩阵对稳健权重矩阵进行更新得到权重矩阵,然后判断后验方差矩阵中元素是否相等,若是,将权重矩阵作为最优权重矩阵,否则,将权重矩阵作为初始解中的初始权重矩阵,并返回对初始解中的初始权重矩阵进行稳健估计得到稳健权重矩阵的步骤,利用进行稳健估计并利用后验方差矩阵,能够降低最优权重矩阵的误差并提高最优权重矩阵的精准度;再利用最优权重矩阵更新观测方程组,并利用更新后的观测方程组估计目标区域在第t个时刻的地形残差,大大降低了地形残差的误差,提高了准确性,进而在将目标区域在第t个时刻的地形残差与目标区域的外部参考dem相加,得到目标区域在当前时刻的dem时,有效提高dem更新的准确性。
78、此外,本技术中获取了多个重复轨道的sar影像数据,且sar影像数据包括多个时刻的多个观测相位的sar影像,将目标区域在一段时间内的地形形变分解为多个时刻的地形,适用于短时序下的dem更新,并且保证了在短时序下的数据量,实现短时序下dem的准确更新。
79、本技术的其它有益效果将在随后的具体实施方式部分予以详细说明。
- 还没有人留言评论。精彩留言会获得点赞!