异形结构三维单体模型快速精细化的重构方法及装置与流程
本发明涉及模型重构,尤其是涉及一种异形结构三维单体模型快速精细化的重构方法及装置。
背景技术:
1、塔楼和桥梁等亭榭楼阁的古建筑、城市化快速推进呈现的特异化标志性建筑,以及文物和艺术雕塑作为人文历史、城市景观的重要组成部分,一般具有丰富的寓意,体现了先民们高超的建构艺术,并对现代建造技艺有重要的科学启发价值。既有艺术观赏性,通常也具有历史典故和教育意义的纪念性。然而随着长时间暴露在空旷的环境中,雨雪、风沙、高温等天气以及其他外在因素都会对建筑物和雕塑的外形及结构产生影响,因此对此类异形结构实体的保护和修复工作也变得越来越重要。
2、通过逆向重建工程高精度获取此类异形结构的空间外形精细化的三维模型是进行管理、研究、利用和修缮工作的前提与基础,由于其多样性的外观、细节丰富的结构和复杂多变的场景环境,往往实际生产应用中面临巨大的挑战。目前对于异形结构的建筑物和雕塑等地物实体建立形象、具体且逼真的三维形式表现模型的手段,在模型精细化程度、复杂场景数据采集完整性、项目建设周期的稳定性和实施操作的便捷程度上均有一定的局限性。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种异形结构三维单体模型快速精细化的重构方法及装置,可以针对城市建筑与(自然、人文、历史)景观中异形结构地理实体,能够在多种复杂场景下灵活、快速、精美地建模。
2、第一方面,本发明实施例提供了一种异形结构三维单体模型快速精细化的重构方法,包括:
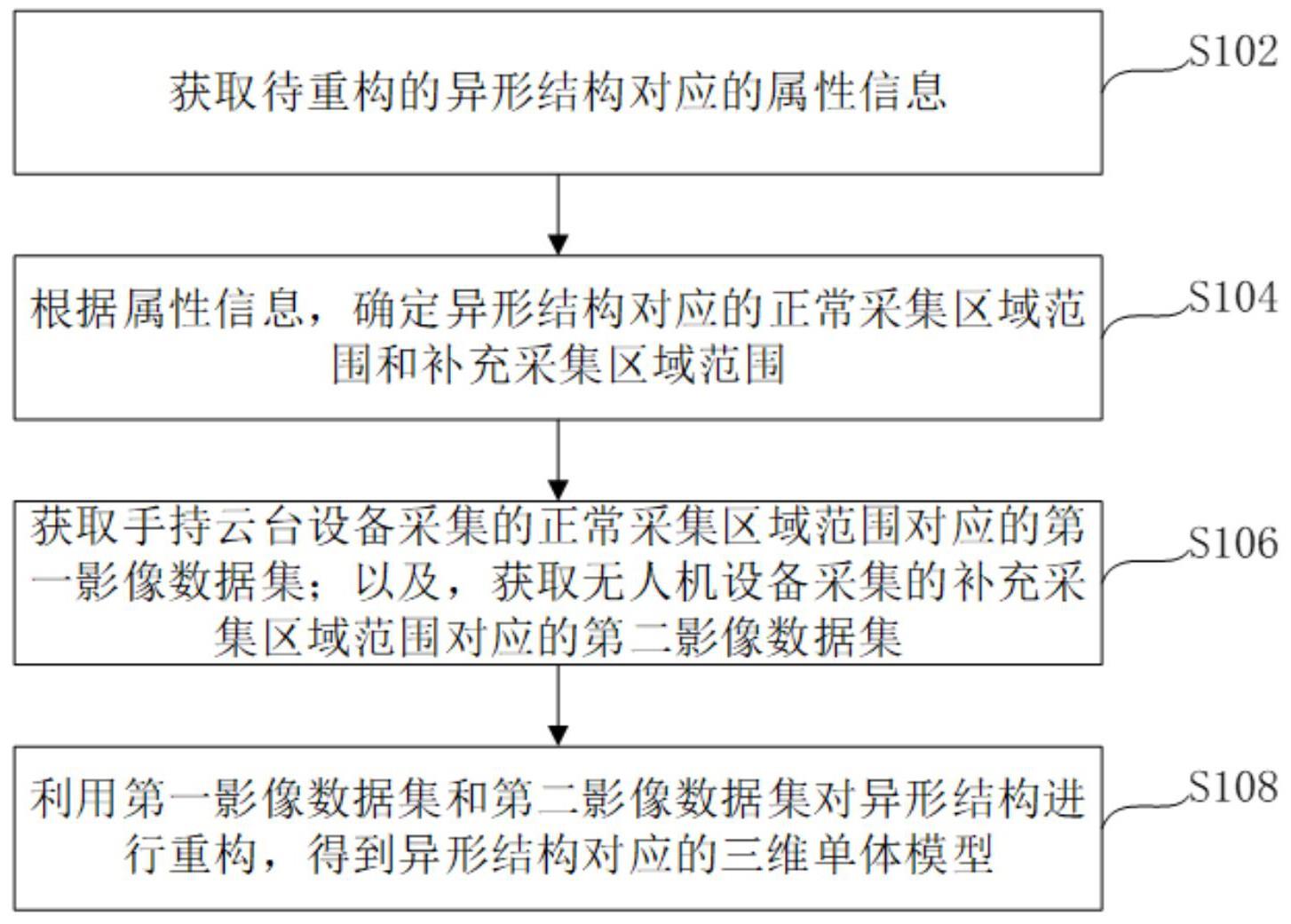
3、获取待重构的异形结构对应的属性信息;
4、根据所述属性信息,确定所述异形结构对应的正常采集区域范围和补充采集区域范围;
5、获取手持云台设备采集的所述正常采集区域范围对应的第一影像数据集;以及,获取无人机设备采集的所述补充采集区域范围对应的第二影像数据集;
6、利用所述第一影像数据集和所述第二影像数据集对所述异形结构进行重构,得到所述异形结构对应的三维单体模型。
7、在一种实施方式中,所述属性信息包括实体高度信息、植被遮挡信息和地形条件信息;根据所述属性信息,确定所述异形结构对应的正常采集区域范围和补充采集区域范围的步骤,包括:
8、将所述异形结构所在区域划分为多个子区域;
9、对于每个所述子区域,基于所述实体高度信息确定该子区域对应的高度值;以及,基于所述植被遮挡信息和所述地形条件信息确定该子区域对应的区域可达性评分值;
10、判断该子区域对应的高度值是否满足预设高度阈值,且判断该子区域对应的所述区域可达性评分值是否满足预设评分值条件;
11、如果是,则将该子区域划分至正常采集区域范围;
12、如果否,则将该子区域划分至补充采集区域范围。
13、在一种实施方式中,判断该子区域对应的所述高度值是否满足预设高度阈值,且判断该子区域对应的所述区域可达性评分值是否满足预设评分值条件的步骤,包括:
14、如果该子区域对应的所述高度值低于手持平台可伸展限高阈值,则确定满足预设高度阈值;以及,如果该子区域对应的所述高度值高于手持平台可伸展限高阈值,则确定不满足所述预设高度阈值;
15、如果该子区域对应的所述区域可达性评分值为第一数值,则确定满足预设评分值条件;如果该子区域对应的所述区域可达性评分值为第二数值,则确定不满足所述预设评分值条件;其中,所述第一数值用于表征手持平台可到达该子区域,所述第二数值用于表征手持平台不可到达该子区域。
16、在一种实施方式中,获取无人机设备采集的所述补充采集区域范围对应的第二影像数据集的步骤,包括:
17、根据所述补充采集区域范围,规划无人机采集路径;
18、将所述无人机采集路径发送至无人机平台或无人机控制端,以通过所述无人机平台或所述无人机控制端控制无人机设备,通过环绕飞行进行贴近摄影测量,得到所述补充采集区域范围对应的第二影像数据集;
19、接收所述无人机设备采集的所述第二影像数据集。
20、在一种实施方式中,利用所述第一影像数据集和所述第二影像数据集对所述异形结构进行重构,得到所述异形结构对应的三维单体模型的步骤,包括:
21、对所述第一影像数据集和所述第二影像数据集进行联合空三解算,并从所述第一影像数据集和所述第二影像数据集中选取目标连接点,对所述目标连接点进行融合校正处理,得到目标影像数据集;
22、根据所述目标影像数据集,确定所述异形结构对应的表面位置信息、几何关系信息和纹理色彩信息,用以构建不规则三角网表面模型;
23、将所述纹理色彩信息映射至所述不规则三角网表面模型,得到所述异形结构对应的三维单体模型。
24、在一种实施方式中,在利用所述第一影像数据集和所述第二影像数据集对所述异形结构进行重构,得到所述异形结构对应的三维单体模型的步骤之后,所述方法还包括:
25、对所述三维单体模型进行精修处理和融合处理,得到所述异形结构对应的目标三维单体模型;其中,所述精修处理包括多余部分去除处理、空洞及毛刺修正处理、地理位置及方向调节处理。
26、第二方面,本发明实施例还提供一种异形结构三维单体模型快速精细化的重构装置,包括:
27、信息获取模块,用于获取待重构的异形结构对应的属性信息;
28、范围确定模块,用于根据所述属性信息,确定所述异形结构对应的正常采集区域范围和补充采集区域范围;
29、数据采集模块,用于获取手持云台设备采集的所述正常采集区域范围对应的第一影像数据集;以及,获取无人机设备采集的所述补充采集区域范围对应的第二影像数据集;
30、重构模块,用于利用所述第一影像数据集和所述第二影像数据集对所述异形结构进行重构,得到所述异形结构对应的三维单体模型。
31、在一种实施方式中,所述属性信息包括实体高度信息、植被遮挡信息和地形条件信息;范围确定模块还用于:
32、将所述异形结构所在区域划分为多个子区域;
33、对于每个所述子区域,基于所述实体高度信息确定该子区域对应的高度值;以及,基于所述植被遮挡信息和所述地形条件信息确定该子区域对应的区域可达性评分值;
34、判断该子区域对应的高度值是否满足预设高度阈值,且判断该子区域对应的所述区域可达性评分值是否满足预设评分值条件;
35、如果是,则将该子区域划分至正常采集区域范围;
36、如果否,则将该子区域划分至补充采集区域范围。
37、第三方面,本发明实施例还提供一种电子设备,包括处理器和存储器,所述存储器存储有能够被所述处理器执行的计算机可执行指令,所述处理器执行所述计算机可执行指令以实现第一方面提供的任一项所述的方法。
38、第四方面,本发明实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令在被处理器调用和执行时,计算机可执行指令促使处理器实现第一方面提供的任一项所述的方法。
39、本发明实施例提供的一种异形结构三维单体模型快速精细化的重构方法及装置,首先获取待重构的异形结构对应的属性信息,从而根据所述属性信息,确定所述异形结构对应的正常采集区域范围和补充采集区域范围;然后获取手持云台设备采集的所述正常采集区域范围对应的第一影像数据集,以及获取无人机设备采集的所述补充采集区域范围对应的第二影像数据集;最后利用所述第一影像数据集和所述第二影像数据集对所述异形结构进行重构,得到所述异形结构对应的三维单体模型。上述方法提出了以手持云平台搭载激光雷达相机采集为主,辅以无人机环绕飞行贴近摄影相结合的异形结构三维单体模型快速精细化重构技术,从而可以针对城市建筑与(自然、人文、历史)景观中异形结构地理实体,能够在多种复杂场景下灵活、快速、精美地建模。
40、本发明的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
41、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!