一种基于倾斜摄影模型构建动态三维噪声地图的方法与流程
本发明涉及噪声地图,具体涉及一种基于倾斜摄影模型构建动态三维噪声地图的方法。
背景技术:
1、以往的噪声地图只能反映噪声在平面上的分布情况,而三维噪声地图可以更加具体了解城市建筑的噪声分布情况,在三维噪声地图上,目前国内上海、北京等地都建设了三维噪声地图,但都是小范围实验性质的,噪声地图一般是静态的,而且噪声地图底图一般都是二维,三维白模。
2、首先是三维噪声地图底图,传统的三维噪声地图底图都是基于白模构建,而白模存在数据精度的问题,目前国内主流的第三方gis平台,地理信息更新频率以年为单位,一般最快也要一两年才更新一次,这将导致高速发展的城市区域直接获取的地理要素可能与最新实际情况存在较大偏差,无法与实景良好匹配,尤其是建筑三维信息。
3、其次是噪声地图数据准确性以及自动更新的问题,源清单信息、源强信息、地理信息等基础信息的数据质量,对区域噪声地图模拟计算结果的准确性具有决定性的作用。源清单与源强信息的调查,一般是通过现场人工调查与采样监测的方式获取,存在代表性不足问题,重点道路通过相关交通管理部门获取统计总体车流量数据,具体到每条道路难以获取到精细化的数据。
4、最后是基于实时监测数据动态更新噪声得图的应用难点,传统噪声地图是基于点源、线源、面源等调查数据,根据《环境影响评价技术导则声环境》(hj2.4-2021)的相关噪声发散与衰减算法进行计算绘制而成的昼间、夜间静态噪声地图。引入重点噪声源的实时噪声监测数据后,如何通过瞬时、小时噪声监测数据,对噪声地图进行动态计算与更新绘制,目前国内未有相关的技术规范与指引。
技术实现思路
1、本发明的目的在于提供一种基于倾斜摄影模型构建动态三维噪声地图的方法,其为一种基于无人机倾斜摄影为底图构建的cim实景动态三维噪声地图方法,该方法以三维地图为基础,融合cim实景三维模型、城市实时动态噪声地图模型,实现实时动态的噪声地图一屏统览。
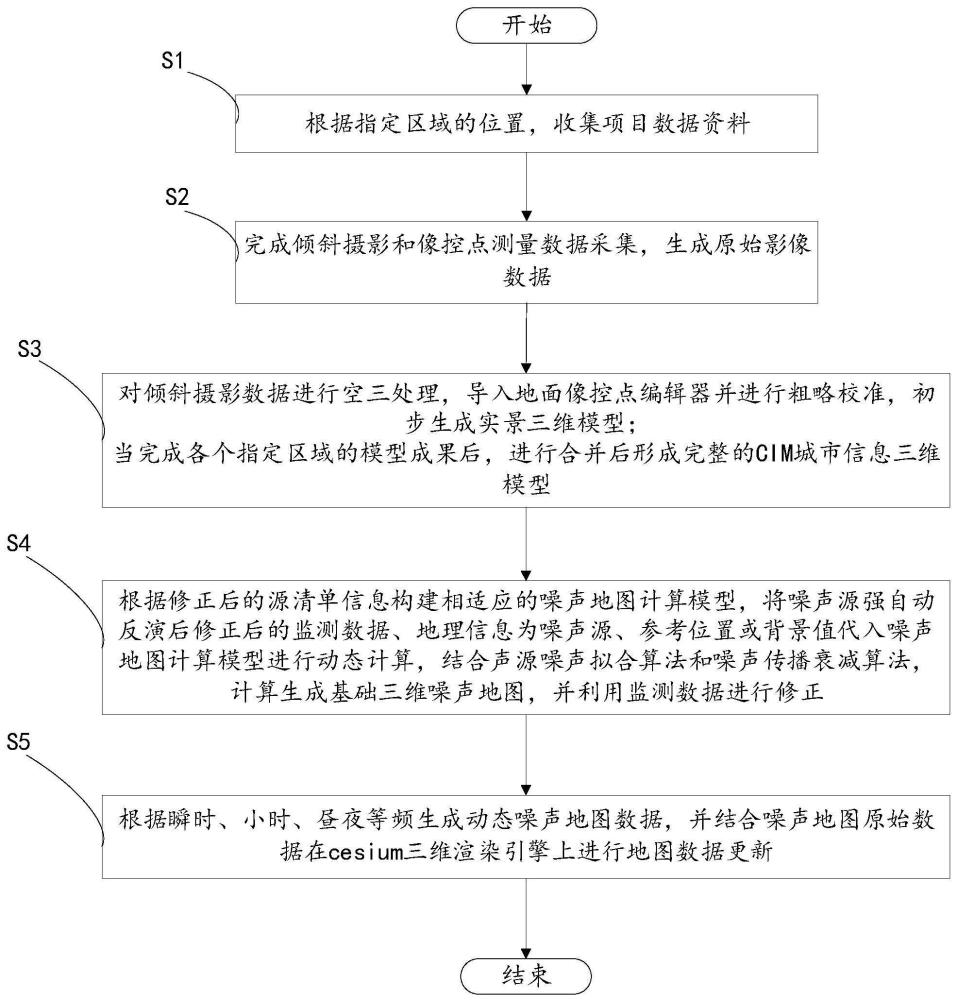
2、本发明提供一种基于倾斜摄影模型构建动态三维噪声地图的方法,该方法包括以下步骤:根据指定区域的位置,收集项目数据资料;
3、完成倾斜摄影和像控点测量数据采集,生成原始影像数据;
4、将获取到的原始影像数据进行图像处理,按照匀光、匀色步骤去对航摄影像数据进行调整生成,获得最佳成像效果的倾斜摄影数据;
5、对倾斜摄影数据进行空三处理,导入地面像控点编辑器并进行粗略校准,初步生成实景三维模型,对玻璃、水面、破洞等漏洞进行修补,对房屋面或者路面变形较大的区域进行模型优化拟合,当完成各个指定区域的模型成果后,进行合并后形成完整的cim城市信息三维模型,其中,该模型用于提供噪声地图原始数据;
6、根据修正后的源清单信息构建相适应的噪声地图计算模型,将噪声源强自动反演后修正后的监测数据、地理信息为噪声源、参考位置或背景值代入噪声地图计算模型进行动态计算,结合声源噪声拟合算法和噪声传播衰减算法,计算生成基础三维噪声地图,并利用监测数据进行修正,根据瞬时、小时、昼夜等频生成动态噪声地图数据,并结合噪声地图原始数据在cesium三维渲染引擎上进行地图数据更新。
7、根据本发明提供的一种基于倾斜摄影模型构建动态三维噪声地图的方法,所述噪声地图计算模型包括噪声源空间辐射模型、点声源辐射模型、道路交通线声源辐射模型、多车道公路线声源辐射模型、轨道交通线声源辐射模型、面声源辐射模型。
8、根据本发明提供的一种基于倾斜摄影模型构建动态三维噪声地图的方法,构建噪声源空间辐射模型,包括:
9、定量分析不同类型车辆各行驶状态参数与车辆瞬时噪声排放的相关性,确定各类型车辆行驶时噪声辐射与各行驶状态参数的关系,基于实测数据得到各种车型的噪声频谱统计特性;
10、其中,户外声传播衰减包括几何发散、大气吸收、地面效应、障碍物屏蔽、其他多方面效应引起的衰减;
11、可根据声源声功率级、户外声传播衰减,计算预测点的声级,表示为公式(11):
12、lp(r)=lw+dc-(adiv+aatm+agr+abar+amisc) (11)
13、其中,lp(r)为预测点处声压级,db;lw为由点声源产生的声功率级,db;dc为指向性校正,它描述点声源的等效连续声压级与产生声功率级lw的全向点声源在规定方向的声级的偏差程度,db;adiv为几何发散引起的衰减,db;aatm为大气吸收引起的衰减,db;agr为地面效应引起的衰减,db;abar为障碍物屏蔽引起的衰减,db;amisc为其他多方面效应引起的衰减,db。
14、可根据参考位置处的声压级、户外声传播衰减,计算预测点的声级,表示为公式(12):
15、lp(r)=lp(r0)+dc-(adiv+aatm+agr+abar+amisc) (12)
16、其中,lp(r)为预测点处声压级,db;
17、lp(r0)为参考位置r0处的声压级,db;
18、dc为指向性校正,它描述点声源的等效连续声压级与产生声功率级lw的全向点声源在规定方向的声级的偏差程度,db;adiv为几何发散引起的衰减,db;aatm为大气吸收引起的衰减,db;agr为地面效应引起的衰减,db;abar为障碍物屏蔽引起的衰减,db;amisc为其他多方面效应引起的衰减,db;
19、预测点的a声级la(r)按以下公式计算,即将8个倍频带声压级合成,计算出预测点的a声级[la(r)],表示为公式(13):
20、
21、其中,la(r)为距声源r处的a声级,db(a);lpi(r)为预测点(r)处,第i倍频带声压级,db;δli为第i倍频带的a计权网络修正值,db。
22、在只考虑几何发散衰减时,按公式(14)计算:
23、la(r)=la(r0)-adiv (14)
24、其中,la(r)为距声源r处的a声级,db(a);la(r0)为参考位置r0处的a声级,db(a);adiv为几何发散引起的衰减,db。
25、根据本发明提供的一种基于倾斜摄影模型构建动态三维噪声地图的方法,构建点声源辐射模型,包括:
26、点声源的几何发散衰减分为无指向性点声源和具有指向性点声源,其中,无指向性点声源几何发散衰减的基本公式为公式(21):
27、lp(r)=lp(r0)-20lg(r/r0) (21)
28、如果已知点声源的倍频带声功率级或a声功率级,且声源处于自由声场,则公式(21)等效为公式(22):
29、lp(r)=lw-20lgr-11 (22)
30、对于近地面的点声源,可视为声源处于半自由声场,只有一半的扩散衰减空间,因此点声源的衰减等效为公式(23):
31、lp(r)=lw-20lgr-8 (23)
32、具有指向性点声源的几何发散衰减的计算包括:对于自由空间的点声源,其在某一θ方向上距离r处的倍频带声压级计算为公式(24):
33、lp(r)θ=lw-20lg(r)+diθ-11 (24)
34、其中,lp(r)θ为自由空间的点声源在某一θ方向上距离r处的声压级,db;lw为点声源声功率级,db;r为预测点距声源的距离;diθ为θ方向上的指向性指数,diθ=10lgrθ,其中,rθ为指向性因数,rθ=iθ/i,其中,i为所有方向上的平均声强,w/m2,iθ为某一θ方向上的声强,w/m2。对于固定点声源,一般采用声源的倍频带声功率级、a声功率级或靠近声源某一位置的倍频带声压级、a声级来预测计算距声源不同距离的声级。
35、根据本发明提供的一种基于倾斜摄影模型构建动态三维噪声地图的方法,构建道路交通线声源辐射模型,包括:
36、道路交通声源的辐射声级lm,e表示为公式(31):
37、lm,e=lm(25)+dv+dstro+dstg (31)
38、其中,lm(25)为根据公式(2)求出的平均声级;dv为对不同最高限速的修正;dstro为对不同道路表面的修正;dstg为对道路坡度的修正;
39、平均声级mean level lm(25)的计算条件为:水平距离25m,光滑沥清道路表面,限速100km/h,坡度<5%,距道路表面平均2.25m的高度声波自由传播,表示为公式(32):
40、lm(25)=37.3+10×lg[m×(1+0.082×p)] (32)
41、其中,m为单车道每小时平均车流量,当进行多车道公路计算时,最外部两条车道的车流量为1/2m;p为卡车所占百分率(载重量>2.8吨);
42、然后,进行速度修正:dv,速度修正用于对不同于100km/h的限速进行修正,表示为公式(33)。
43、
44、lpkw=27,7+10·lg[1+(0,02·vpkw)3]
45、llkw=23,1+12,5·lg(vlkw)
46、d=llkw-lpkw (33)
47、其中,vpkw为汽车的限速(30km/h-130km/h),vlkw为卡车的限速(30km/h-80km/h),llkw、lpkw为汽车和卡车的每小时平均辐射声压级lm(25)。
48、根据本发明提供的一种基于倾斜摄影模型构建动态三维噪声地图的方法,构建多车道公路线声源辐射模型,包括:
49、对于多车道公路,按照在最外部的两条车道上方0.5m处假设两条线声源进行计算,这两条线声源单独计算结果,然后进行能量叠加,表示为公式(41)。
50、lm=10×lg[100.1×lm,n+100.1×lm,f] (41)
51、其中,lm,n为近距离最外部车道;lm,f为远距离最外部车道对于单车道公路,近距离车道和远距离车道可视为同一车道;
52、将一条车道沿车道方向划分为i个小段,声源发射点位于每个小段的中心处上方0.5m,每小段的长度li不应超过0.5si每一小段的平均声压级lm,i,总的lm为公式(42):
53、lm,i=10×lg∑100.1×lm,i......(42)
54、一条车道的每一小段的平均声压级lm,i的计算表示为公式(43):
55、lm,i=lm,e+dl+ds+dbm-db......(43)
56、其中:lm,e为按照公式(1)计算每一小段的辐射噪声级;dl为不同小段长度的修正:dl=10×lg(l);ds为空气吸收和距离衰减;dbm为地面吸收和气候影响修正;db为地形和建筑物修正。
57、根据本发明提供的一种基于倾斜摄影模型构建动态三维噪声地图的方法,构建面声源辐射模型,包括:
58、若已知面声源单位面积的声功率为w,各面积元噪声的位相是随机的,面声源可看做由无数点声源连续分布组合而成,其合成声级可按能量叠加法求出:
59、当预测点和面声源中心距离r处于以下条件时,按下述方法近似计算:r<a/π时,几乎不衰减(adiv≈0);当a/π<r<b/π,距离加倍衰减3db左右,类似线声源衰减特性[adiv≈10lg(r/r0)];当r>b/π时,距离加倍衰减趋近于6db,类似点声源衰减特性[adiv≈20lg(r/r0)],其中,面声源的b>a。
60、根据本发明提供的一种基于倾斜摄影模型构建动态三维噪声地图的方法,所述噪声传播衰减算法的执行包括:
61、建立建筑物间噪声衰减计算方法,建立声屏障衰减计算模型,建立外界因素对噪声传播影响的噪声传播衰减计算模型。
62、根据本发明提供的一种基于倾斜摄影模型构建动态三维噪声地图的方法,所述外界因素包括大气吸收引起的衰减、地面效应引起的衰减、障碍物屏蔽引起的衰减、其他多方面效应引起的衰减、绿化林带引起的衰减、建筑群噪声衰减。
63、根据本发明提供的一种基于倾斜摄影模型构建动态三维噪声地图的方法,所述在cesium三维渲染引擎上进行地图数据更新,包括
64、把噪声地图计算模型输出的地图图层数据、地图图形数据在cesium引擎上,进行空间插值计算,实现动态扩散效果、栅格图层处理,建筑物贴膜效果的绘制渲染更新;
65、从声源衰减数据表中检索对应的噪声地图点和噪声特征字段,依噪声地图点作为地图更新区域;根据在线自动监测系统获取的声源数据变化,对该声源的辐射和衰减计算值进行对比,将之间的插值扩展到整个声源衰减数据表中统一声源属性下的所有数据点,实现基于实测数据的噪声地图扩散效果;
66、在cesium中,使用primitive和entity两种方式来渲染3d几何实体;其中,primitive是底层渲染api,使用面primitive图元渲染,就能实现了建筑物不同楼层不同颜色的效果,把噪声计算模型输出的建筑物各个楼面,楼层的图层数据格式化geojson格式用于cesium加载,最后以图元设置图片纹理来加载栅格图层。
67、由此可见,相对于现有技术,本发明利用cim影像数据,构建噪声地图基础数据,整合噪声声源数据噪声源信息、地理信息和模型算法,计算三维噪声地图,并利用监测数据进行修正。根据瞬时、小时、昼夜等频生成动态噪声地图数据,并结合噪声地图原始数据在cesium三维渲染引擎上进行地图数据更新。
68、进一步的,本发明是基于倾斜摄影为底图构建三维地图,倾斜摄影具备的自动化建模工艺流程,会经过多视角影像的几何校正、联合平差等处理流程,运算生成基于影像的超高密度点云,点云经过抽稀后构建三角面片的模型骨架,再自动贴合拍摄的倾斜影像,由此生成高精度和高分辨率的场景三维模型。本发明打破传统正射摄影垂直拍摄建筑物屋顶的局限性,可以从多个角度完整地获取建筑物表面的纹理信息,很好的保留的建筑物实景的原貌,强度和纹理等特征。
69、进一步的,本发明通过对源强自动监测数据进行反演推算替代人工调查的源强信息,实现自动化更新和修正,地理信息也通过倾斜摄影的地理模型提取出道路、绿化、建筑物等,再由区域内各个点、线、面噪声源进行逐一建模,并通过拟合与衰减算法计算得出,通过各噪声排放源进行准确的量化,对噪声地图预测计算结果进行验证修正和本地化的相关参数配置调优,得到准确有效的噪声地图数据。
70、进一步的,本发明能够自定义瞬时、小时、昼夜间等更新频率,选取频率匹配的源强实时监测数据,通过辐射模型和衰减算法拟合计算出噪声地图数据,实时把插值计算的栅格图和等值线图在cesium三维渲染引擎上进行动态更新。
71、下面结合附图和具体实施方式对本发明作进一步详细说明。
- 还没有人留言评论。精彩留言会获得点赞!