一种基于YOLOV8模型的水上漂浮物检测优化方法和系统与流程
本发明公开一种基于yolov8模型的水上漂浮物检测优化方法和系统,涉及图像处理。
背景技术:
1、水资源作为人类社会发展的命脉,而在淡水资源中也仅有0.01%水资源适合人类使用。然后,随着我国工业进步和发展水平提高,水面漂浮物污染问题对水体水质及水利安全运行带来不利影响,严重影响了人们的生活和安全。在河流、湖泊、水库等区域和无人值守环境中,利用视频监控进行漂浮物检测已成为一个迫切的需求,通过监控视频实现水面漂浮物检测可提升河湖智能化管理水平。传统方法依靠人工判读视频图像进行漂浮物目标检测,不仅体现在工作量较大,而且检测精度和效率都无法得到保障。因此,及时从监控视频数据中捕捉关键信息,准确高效地识别并定位漂浮物,对实现河湖智能化管理具有十分重要的意义。
2、随着目标检测算法的不断发展,相比传统目标检测算法,基于深度学习的目标检测算法具有更强的泛化能力和鲁棒性。基于深度学习的目标检测算法可分为两类:基于候选区域的双阶段目标检测算法和基于逻辑回归的单阶段目标检测算法。两阶段目标检测算法,如faster r-cnn和mask r-cnn,首先在图像生成可能包含的一系列候选区域,进一步对候选区域进行分类和回归,得到最终的目标类别和位置。单阶段目标检测算法,如yolo(youonly look once)系列和ssd(single shot multibox detector)算法,使用回归的方式,可以分类任务和定位任务合并,在特征提取后获取目标的位置和类别。相比两阶段目标检测算法,单阶段目标检测算法在保证检测精度的同时,降低了模型复杂度,在目标检测的场景中应用更加广泛。这种模型不仅提高了检测精度,而且降低了模型的复杂度。由于水上漂浮物检测容易受到自然天气、光照强度等因素的影响,无法保证在不同场景下检测的实时性和准确性。
3、因此,如何避免在背景复杂、光照变化等复杂真实环境下,提升漂浮物的检测精度是本领域技术人员亟待解决的问题。
技术实现思路
1、本发明针对现有技术的问题,提供一种基于yolov8模型的水上漂浮物检测优化方法和系统,所采用的技术方案为:
2、第一方面,一种基于yolov8模型的水上漂浮物检测优化方法,所述方法包括:
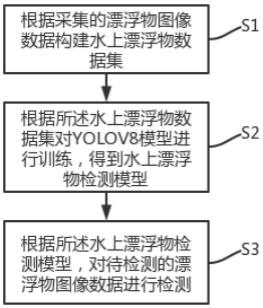
3、根据采集的漂浮物图像数据构建水上漂浮物数据集;
4、根据所述水上漂浮物数据集对yolov8模型进行训练,得到水上漂浮物检测模型;其中,所述yolov8模型包括特征提取模块和特征融合模块,所述特征提取模块包括c2f_pconv模块,所述特征融合模块包括多尺度注意力模块;
5、根据所述水上漂浮物检测模型,对待检测的漂浮物图像数据进行检测。
6、在一些实现方式中,所述根据采集的漂浮物图像数据构建水上漂浮物数据集,包括:
7、所述漂浮物图像数据包括网络端的公开数据集,对所述公开数据集中的图像整理,并通过labelimg工具进行标注,构建得到水上漂浮物数据集;
8、按照8:1:1的方式将所述水上漂浮物数据集划分为训练集、验证集和测试集。
9、在一些实现方式中,所述方法还包括:对所述水上漂浮物数据集进行mosaic数据增强操作,得到增强数据集。
10、在一些实现方式中,所述yolov8模型的结构为9层:
11、将所述增强数据集通过第1层dbs 模块解析,得到特征图feature0;
12、将所述特征图feature0经过第2层dbs模块解析,得到特征图feature1;
13、将所述特征图feature1输入第3层c2f_pconv模块,通过并行梯度流分支解析得到特征图feature2;
14、将所述特征图feature2通过第4层dbs模块解析,得到特征图feature3;
15、将所述特征图feature3经过第5层c2f_pconv模块解析,得到特征图feature4;
16、将所述特征图feature4经过第6层dbs模块和第7层dbs模块解析,得到特征图feature5和特征图feature6;
17、将所述特征图feature6经过第8层dbs模块和第9层dbs模块解析,得到特征图feature7和特征图feature8;
18、将所述特征图feature8经过空间金字塔池化处理后,得到特征图feature9,所述特征图feature9作为所述特征融合模块的输入数据。
19、在一些实现方式中,所述多尺度注意力模块,包括:
20、对所述特征图feature9进行上采样操作,其通道数为512层,获得特征图feature_up1;
21、将所述特征图feature_up1和所述特征图feature6进行特征融合,得到特征图feature_cat1,将所述特征图feature_cat1经过所述c2f模块,其通道数为512层,得到特征图feature10;
22、对所述特征图feature10进行上采样操作得到特征图feature_up2;将所述特征图feature_up2和所述特征图feature4进行特征融合,得到特征图feature_cat2;
23、将所述特征图feature_cat2通过所述c2f_ema模块得到特征图feature11;
24、将所述特征图feature11通过dbs模块后得到特征图feature12,将所述feature12和所述特征图feature10进行特征融合,得到特征图feature_cat3;
25、将所述特征图feature11通过dbs模块后再通过卷积核大小为1×1卷积获得特征图f3,其特征尺寸为原图像的1/8,用于小目标检测;
26、将所述特征图feature_cat3经过所述c2f_ema模块解析,得到特征图feature13;
27、将所述特征图feature13通过dbs模块后得到特征图feature14;将所述feature14和所述特征图feature9进行特征融合,得到特征图feature_cat4;
28、将所述特征图feature_cat4经过所述dbs模块后再通过卷积核大小为1×1卷积获得特征图f2,其特征尺寸为原图像的1/16,用于中目标检测;
29、将所述特征图feature_cat4经过所述c2f_ema模块后再通过卷积核大小为1×1卷积获得特征图f1,其特征尺寸为原图像的1/32,用于大目标检测。
30、在一些实现方式中,所述将所述特征图feature_cat2通过所述c2f_ema模块得到特征图feature11,包括:
31、所述特征图feature_cat2经过多尺度注意力模块,其中所述多尺度注意力模块将部分通道重塑为批量尺度,并将通道维度分组为多个子特征,使空间语义特征在每个特征组中均匀分布,得到特征图feature11。
32、第二方面,本发明实施例提供一种基于yolov8模型的水上漂浮物检测优化系统,所述系统包括:
33、数据采集模块,用于根据采集的漂浮物图像数据构建水上漂浮物数据集;
34、模型训练模块,用于根据所述水上漂浮物数据集对yolov8模型进行训练,得到水上漂浮物检测模型;其中,所述yolov8模型包括特征提取模块和特征融合模块,所述特征提取模块包括c2f_pconv模块,所述特征融合模块包括多尺度注意力模块;
35、数据监测模块,用于根据所述水上漂浮物检测模型,对待检测的漂浮物图像数据进行检测。
36、在一些实现方式中,所述数据采集模块包括:
37、数据解析单元,用于所述漂浮物图像数据包括网络端的公开数据集,对所述公开数据集中的图像整理,并通过labelimg工具进行标注,构建得到水上漂浮物数据集;
38、数据处理单元,用于按照8:1:1的方式将所述水上漂浮物数据集划分为训练集、验证集和测试集。
39、第三方面,本发明实施例提供一种电子设备,包括存储器和处理器,所述存储器用于存储一条或多条计算机指令,其中,所述一条或多条计算机指令被所述处理器执行时,实现如上述第一方面所述的方法。
40、第四方面,本发明实施例提供一种计算机存储介质,所述计算机可读取存储介质中存储有计算机程序,所述计算机程序被处理器执行时,用实现如第一方面所述的方法。
41、本发明的一个或多个实施例至少能够带来如下有益效果:
42、本发明提供一种基于yolov8模型的水上漂浮物检测优化方法;首先,使用mosaic数据增强方法,丰富数据集中目标的特征;其次引入部分卷积,将部分卷积与c2f模块结合,设计c2f_pconv模块,pconv模块只在输入通道的一部分上应用常规conv进行空间特征提取,并保持其余通道不变,进一步在pconv之后增加逐点卷积,使得输入特征图的有效感受野更加关注其中心位置,利用卷积核之间的冗余节省了计算量。在特征融合模块将c2f模块替换为c2f_ema模块,利用高效多尺度注意力模块中跨空间学习方法,在没有通道降维的情况下使得每个并行子网络建立局部跨通道交互,并通过跨空间学习方法融合两个并行子网络的输出特征图,以增强特征的聚合性。提升模型对于目标的识别能力,减少目标的漏检,该方法可以在复杂的环境下对水上漂浮物进行有效检测。
- 还没有人留言评论。精彩留言会获得点赞!