锡膏印刷网和PCB的位置偏差的估计方法、设备及存储介质
本发明涉及锡膏印刷的图像处理,具体涉及一种锡膏印刷网和pcb的位置偏差的估计方法、设备及存储介质。
背景技术:
1、锡膏印刷机一般包括pcb夹持及其运动系统、网框夹持及其运动系统、锡膏供应系统、刮刀控制系统、印刷网清洗系统以及图像视觉系统,锡膏印刷网通常为钢网。pcb夹持运动系统将待印刷pcb传送到设定位置并将其夹持固定;网框夹持和运动系统控制钢网靠近和离开待印刷pcb;图像视觉系统获取待印刷pcb和印刷网的图像,计算pcb和印刷网模板的偏差,并控制平台校正配准系统或手工进行pcb位置校正,实现钢网和pcb的配准;清洗系统用于模板多余锡膏的清洗。
2、锡膏印刷钢网和待印刷pcb的配准是锡膏印刷的一个重要步骤。随着smt封装器件的小型化,手工配准不仅耗时费力,精度也难以保证。同时,pcb图像中除了贴片焊盘和mark外,还有其它的图案,包括阻焊层、丝印层、插式焊盘、过孔、连接线、敷铜,这些干扰信息会影响位置偏差的估计精度。此外,光照的不均匀性也会影响钢网和pcb的配准精度。
3、目前广泛应用自动配准方法。现有的自动配准方法是在钢网和待印刷pcb上设置专门用于对位的标准对位标志(mark),为了减少相机的非线性畸变影响,配准时要移动相机使镜头光轴尽可能对准pcb和钢网的mark中心。这种配准系统的相机是放在钢网和pcb之间,要用从两个方向对钢网和pcb进行拍摄;配准时,要下移pcb或上移钢网,印刷时则要顶升pcb板,结构复杂,不便于操作。
4、专利号为201310367282.4的发明提供一种锡膏印刷机及其视觉对位方法,在pcb设计图像上获取指定区域图像数据,从待印刷pcb图像上指定位置获取实际图像并将二者进行对比。这种方法中,pcb上的丝印层和阻焊层是干扰信号,影响配准确度;由于相机镜头存在畸变,标准pcb图和实际pcb图像之间有一定的偏差,如果光轴和pcb平面不垂直,不同位置图像的倍率和清晰度也不一样,这将使二者的差别进一步增大,精度不高。
5、申请号201810465547.7的发明提供的配准方法,首先采用标定板对图像采集系统进行标定,以消除图像采集系统的几何畸变。配准时,先分别获取pcb和钢网图像进行畸准校正,再对两个经过校正的图像偏移量进行估计。这种方法需要借助专用标定板标定,过程复杂,运行维护不便,而且是一种间接的配准方法,精度不高且容错性差。
技术实现思路
1、发明目的:本发明目的是提供一种计算速度快、估计精度高、容错性强的锡膏印刷网和pcb的位置偏差的估计方法、设备及存储介质。
2、技术方案:本发明所述的锡膏印刷网和pcb的位置偏差的估计方法,包括以下步骤:
3、获取待印刷的pcb和配合pcb的印刷网,所述pcb表面有若干个实体,所述若干实体包括主要实体、丝印、阻焊层;所述印刷网有若干个开孔,开孔的位置与主要实体位置一一对应,其特征在于,所述估计方法包括以下步骤:
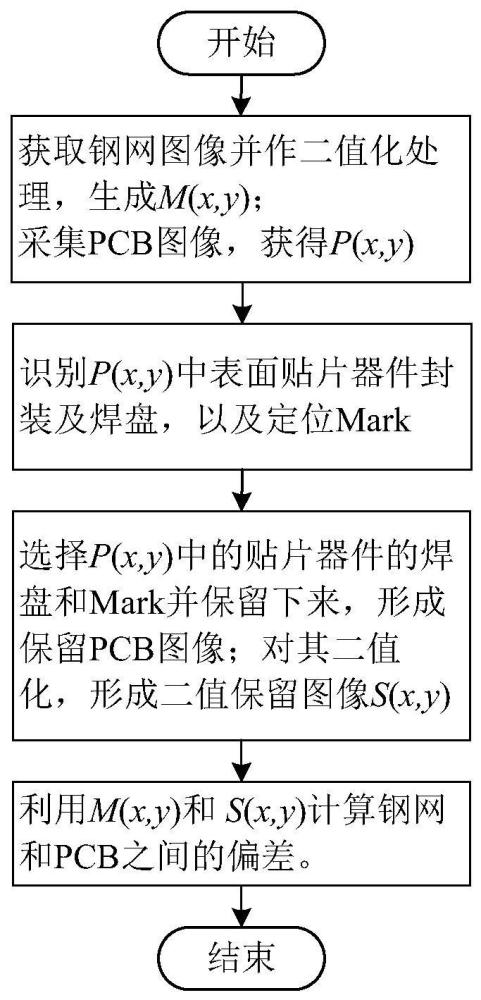
4、s1、使用图像采集系统获取待印刷的pcb图像和印刷网图像;
5、s2、识别并定位pcb图像中所述主要实体的图像,剔除丝印和阻焊层,选择并保留部分主要实体,形成pcb保留图像;
6、s3、对所述pcb保留图像和印刷网图像进行二值化处理,得到pcb二值化图像和印刷网二值化图像;
7、s4、采用特征提取算法处理所述pcb二值化图像和印刷网二值化图像,提取主要实体关键点的描述矢量形成pcb特征,提取印刷网开孔关键点的描述矢量形成印刷网特征,并对pcb特征和印刷网特征进行位置偏差计算,输出偏差结果。
8、进一步的,所述主要实体包括贴片焊盘和/或定位mark。
9、进一步的,当主要实体为贴片焊盘时,在步骤s2中,选择并保留pcb中心、边、角处的贴片焊盘。
10、进一步的,所述特征提取算法包括sift或harris或surf或fast或orb或改进算法。
11、进一步的,所述特征提取算法为改进算法时,采用优化的高斯金字塔算法对所述sift改进;当所述改进算法处理二值化图像i(x,y)∈[0,1],x=0,1,…,x-1,y=0,1,…,y-1时,有以下过程:
12、s41、计算高斯算子:
13、所述二值化图像被变换为高斯金字塔,高斯金字塔包括连续的多个塔层,每个塔层中对应一个确定的高斯算子;每s层塔层设为一组,且共设有o组,第k组第s层高斯算子为:
14、
15、式中,σ0为第0组第0层高斯函数分布的标准差;k为高斯金字塔的组数;s为高斯金字塔的层数;s为每一组高斯金字塔的总层数;x为图像以像素点为单位的横向坐标;y为图像以像素点为单位的纵向坐标;x为图像的横向像素点个数;y为图像的纵向像素点个数。
16、将计算的高斯金字塔内所有的高斯算子保存到数据查找表中,便于后续计算;
17、s42、在每一个高斯卷积核尺度内,计算高斯卷积进行高斯空间变换:
18、s4201,k=0;
19、s4202,s=0;
20、s4203,x=0;
21、s4204,y=0;
22、s4205,m=0;
23、s4206,n=0;
24、s4207,当像素i(x+m,y+n)==1,则l(x,y,k,s)=l(x,y,k,s)+g(m,n,k,s);
25、s4208,n=n+1,如果n<2w则转s4207,否则s4209;
26、s4209,m=m+1,如果m<2w则转s4206,否则转s4210;
27、s4210,y=y+2k,如果y<y则转s4205,否则转s4211;
28、s4211,x=x+2k,如果x<x则转s4204,否则转s4212;
29、s4212,s=s+1,如果s<s则转s4203,否则转s4213;
30、s4213,k=k+1,如果k<o则转s4202,否则转s4214;
31、s4214,结束;
32、s43、利用高斯空间变换计算差分高斯卷积:
33、d(x,y,k,s)=l(x,y,k,s+1)-l(x,y,k,s),k=0,1,…,o-1,s=0,1,…,s-2,
34、x=0,2k-1,2k+1-1,…,y=0,2k-1,2k+1-1,…
35、式中,l(x,y,k,s)为高斯卷积;g(m,n,k,s)为高斯卷积核;m为高斯卷积核的模向坐标;n为高斯卷积核的纵向坐标;d(x,y,k,s)为差分高斯卷积;
36、s44、处理差分高斯变换,定位关键点pk,s(xi,yi)并计算关键点相关特征,导出为描述矢量,具体过程如下:
37、s441、在高斯空间的坐标系统中,以关键点pk,s(xi,yi)为中心,定义关键点的邻域:
38、
39、式中,c>1为系数;为正整数;i为关键点的序号;jk,s,i为邻域内邻点总数;nk,s,i(xj,yj)为pk,s(xi,yi)邻域内第j个邻点,j=0,1,…,jk,s,i-1;
40、s442、计算并处理邻域中各邻点的特征,得到关键点的主方向
41、s443、将坐标系统绕关键点沿主方向旋转,通过矢量合成统计为描述矢量并导出,第k组s层i个关键点pk,s(xi,yi)的描述矢量如下:
42、
43、式中,desi,d是第i个关键点邻域的第d个子域中统计获得的q'×1维子矢量,t表示转置,q'是各邻点梯度方向的量化范围。
44、进一步的,步骤s2由目标识别定位器实现,获取所述目标识别定位器有如下过程;
45、s21、建立样本库,所述样本库包括基本样本,所述基本样本包括所述若干个实体以及实体对应的标注信息,所述标注信息包括位置、名称;
46、s22、设计基于样本训练的目标识别定位器模型;
47、s23、使用所述样本库对所述目标识别定位器模型进行训练,直至满足精度要求,形成目标识别定位器。
48、进一步的,所述目标识别定位模型为基于神经网络的识别定位模型或支持向量机模型。
49、本发明所述的计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现所述方法的步骤。
50、本发明所述的计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现所述的方法的步骤。
51、有益效果:本发明具有如下显著效果:1、计算速度快:修改sift形成改进算法,省去全部的乘法运算和大部分的加法运算,从而降低变换空间计算的时间复杂性和空间复杂性;同时印刷网二值化图像和pcb二值化图像采用稀疏矩阵的形式,节省了存储空间,计算速度快,耗时短;2、估计精度高:首先采用相同光路特性的图像采集系统获取待印刷pcb图像和印刷网图像,克服了光学畸变带来的影响;在实体的位置估计中,去除了丝印层、阻焊层等干扰因素的影响,位置偏差的估计精度可以进一步提高;将印刷网图像和pcb保留图像进行二值化,消除光照等原因造成的干扰;3、容错性强:直接从待印刷pcb图像和印刷网图像计算位置偏差,图像采集系统引起的几何畸变相同,容错性强。
- 还没有人留言评论。精彩留言会获得点赞!