地理信息数据演变识别处理方法、系统及存储介质与流程
本发明涉及数据挖掘,尤其涉及一种地理信息数据演变识别处理方法、系统及存储介质。
背景技术:
1、人类社会正从工业经济迈向知识经济时代,一场以信息技术为核心的革命正在深刻改变着人类生活与社会面貌。作为全球信息化浪潮重要组成部分的地理信息系统的建设与应用,正日益引起科技界、企业界和政府部门的广泛关注。
2、地理信息系统的出现与现代科学方法(包括系统论、信息论、控制论等)的蓬勃发展及计算机科学技术、空间技术和自动化技术的广泛应用密切相关。其中,信息论和控制论的发展,为信息技术特别是计算机技术的出现打下了坚实的理论基础,而计算机基础的迅猛发展也为gis的出现和发展提供了技术保证;其中空间技术和自动化技术为gis提供了海量的数据来源,并大量地节省人力物力并提高了工作效率。而如何利用地理空间数据构建坐标系并实现将航空影像数据、民航相关数据、道路交通数据等数据投射融合,并实现数据的演变识别,是目前地理信息数据扩展应用的方向,也能对研究区进行更多的数据融合分析,以便于数据的共享与集成。
技术实现思路
1、本发明的目的在于解决背景技术所指出的技术问题,提供一种地理信息数据演变识别处理方法、系统及存储介质,将采集的地理空间数据存储于gis数据库中并采用utm投影方式将经纬度坐标转换为投影坐标,利用数据挖掘技术,对采集到地理信息进行分析和挖掘,能够实现地理信息数据的扩展应用,提供承载有地理信息的丰富数据内容,便于对比观测,实现研究区的演变识别,有助于数据的共享和集成。
2、本发明的目的通过下述技术方案实现:
3、一种地理信息数据演变识别处理方法,其方法包括:
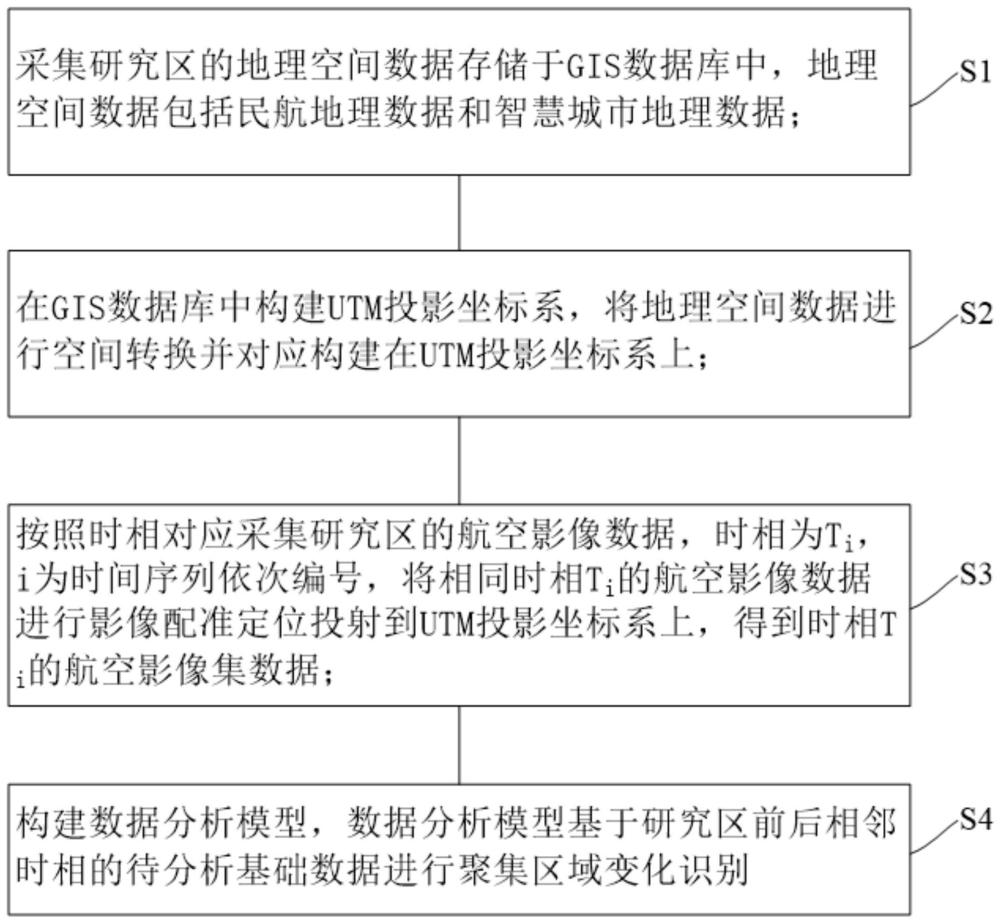
4、s1、采集研究区的地理空间数据存储于gis数据库中,地理空间数据包括民航地理数据和智慧城市地理数据;
5、s2、在gis数据库中构建utm投影坐标系,将地理空间数据进行空间转换并对应构建在utm投影坐标系上;
6、s3、按照时相对应采集研究区的航空影像数据,时相为ti,i为时间序列依次编号,将相同时相ti的航空影像数据进行影像配准定位投射到utm投影坐标系上,得到时相ti的航空影像集数据;影像配准定位投射方法如下:
7、s31、采用多项式函数模型进行影像配准定位投射处理,多项式函数模型的配准表达式如下:
8、x′=a0+a1x+a2y+a3x2+a4xy+a5y2+...+anxk+ε1
9、y′=b0+b1x+b2y+b3x2+b4xy+b5y2+...+bnyk+ε2
10、其中,(x′,y′)表示配准后的图像坐标,ε1和ε2表示配准残差,k表示多项式函数的阶数,n表示地面控制点数量;
11、s32、通过最小二乘法估计参数a0~an和b0~bn的值,使得残差最小化,构造系数矩阵a和常数项向量b,具体表达式如下:
12、
13、
14、其中,系数矩阵a中表示一个控制点的图像坐标,常数项向量b中表示一个控制点的地理坐标,第i个控制点的地理坐标为(xi,yi),对应的图像坐标为(xi,yi);
15、s33、通过如下公式得到系数向量c:
16、c=inv(ata)atb
17、其中,inv(ata)表示a的转置矩阵与a的乘积的逆矩阵,c表示系数向量;
18、将系数向量c的值代入多项式函数模型的表达式中并对所有控制点计算得到utm投影坐标系上的预测坐标值;然后使用估计得到的多项式参数将航空影像数据的像素坐标进行配准;
19、采集研究区时相ti的待分析基础数据并对应配准投射到utm投影坐标系中,待分析基础数据包括民航相关数据、人口数据、道路交通数据,民航相关数据包括飞机飞行数据,道路交通数据包括道路上车辆行驶数据;
20、s4、构建数据分析模型,数据分析模型基于研究区前后相邻时相ti-1、时相ti的待分析基础数据进行聚集区域变化识别,其方法如下:
21、s41、在utm投影坐标系中对待分析基础数据随即选择k个数据点作为初始中心,第i个簇表示为ci,计算数据点xj与所有簇中心的距离,表达式如下:
22、arg mini||xj-ui||2
23、其中,||xj-ui‖2表示数据点xj和簇中心ui之间的欧几里德距离的平方,ui表示ci的中心;
24、s42、计算每个簇中所有数据点的平均值,将这个平均值作为新的簇中心,表达式如下:xj∈ci;其中,表示数据点的平均值,ci表示簇,xj表示数据点;
25、s43、重复步骤s41、步骤s42,直到得到稳定的簇中心及簇;
26、s44、将前后相邻时相ti-1、时相ti的待分析基础数据分别按照步骤s41~s43处理得到前后相邻时相所对应的簇中心及簇,对前后相邻时相所对应的簇中心及簇并以簇作为聚集区域,将前后相邻时相的聚集区域变化进行识别并得到聚集区域变化识别。
27、为了更好地实现本发明,在步骤s43中,还包括如下方法:
28、a1、构建簇边缘的节点、边之间拓扑关系的网络,其中节点为簇边缘的凸起点,边为两个节点的连线;对于每一个节点找出所有以该节点为起点和终点的边,将这些边中另一端的节点加入到该节点的邻居节点列表和反向邻居节点列表中;
29、a2、采用a*算法计算出网络中簇边缘的最短路径作为簇的边界并作为聚集区域边界,表达式如下:
30、f(n)=g(n)+h(n);其中,n表示当前节点,g(n)表示起点到n的实际距离,h(n)表示从n到终点的估计距离,f(n)为节点n的综合估价值,用于衡量节点的优先级。
31、优选地,所述民航相关数据还包括航空器轨迹数据、机场数据库以及航班数据,基于民航相关数据统计出研究区时相ti航空器的位置、轨迹信息、真实飞行高度信息、真实空速并存储为运营管理数据;所述智慧城市地理数据还包括通过道路上部署传感器、视频监控设备获取到研究区的道路交通数据,计算得出车流量并存储为车流量监控数据。
32、优选地,所述地理空间数据采用空间插值方法估计预测未观测区域的数值,具体计算表达式如下:
33、z(u)=∑λi×di(u);其中,z(u)表示在位置u处的估计值,λi表示权重系数,di(u)表示位置u与已知点i之间的距离。
34、优选地,所述民航相关数据还包括机场数据、跑道数据,道路交通数据还包括道路线路数据,从民航相关数据、道路交通数据中选择点状设施、线状设施,点状设施包括跑道入口点、道路交叉点,线状设施包括跑道、道路线路,以点状设施、线状设施划设出关注区域;数据分析模型基于研究区前后时相ti-1、时相ti关注区域的待分析基础数据进行聚集区域变化识别。
35、一种地理信息数据演变识别处理系统,包括数据获取模块和数据分析处理系统,所述数据分析处理系统包括gis数据库、多项式函数模型和数据分析模型,所述数据获取模块用于采集研究区的地理空间数据、研究区的航空影像数据、研究区时相ti的待分析基础数据;所述gis数据库内部构建有utm投影坐标系,gis数据库内部具有空间转换模块,空间转换模块将地理空间数据、待分析基础数据进行空间转换并对应构建在utm投影坐标系上,多项式函数模型将航空影像数据进行影像配准定位投射至utm投影坐标系上;数据分析模型基于研究区前后相邻时相ti-1、时相ti的待分析基础数据进行聚集区域变化识别,然后输出识别结果。
36、一种存储介质,包括存储器和处理器,所述存储器存储有可执行程序,其特征在于,所述处理器执行所述可执行程序时实现本发明地理信息数据演变识别处理方法的步骤。
37、本发明较现有技术相比,具有以下优点及有益效果:
38、(1)本发明将采集的地理空间数据存储于gis数据库中并采用utm投影方式将经纬度坐标转换为投影坐标,利用数据挖掘技术,对采集到地理信息进行分析和挖掘,能够实现地理信息数据的扩展应用,提供承载有地理信息的丰富数据内容,便于对比观测,实现研究区的演变识别,有助于数据的共享和集成。
39、(2)本发明能够对采集到地理信息进行分析和挖掘,利用航空影像数据的空间聚类分析来识别道路网络中的拥堵瓶颈,并分析不同道路之间的连接性和交通流量,通过研究某个地区的交通流量,优化交通管理以实现空间的合理规划。
- 还没有人留言评论。精彩留言会获得点赞!