基于智能UUV目标识别与反对抗效能评估方法及评估模型
本发明属于智能uuv目标识别与反对抗,涉及复杂环境下智能水下无人系统的对抗与反对抗技术,具体为基于智能uuv目标识别与反对抗效能评估方法及评估模型。
背景技术:
1、智能无人水下航行器作为一类典型的海域无人系统,是实现立体化海洋空间的关键节点,智能uuv目标识别具有无人员伤亡、成本低、隐身性能好以及连续性强等诸多优势,特别适合在恶劣、危险的极端环境中替代有人平台执行海上作战任务,在科研考察、反潜作战、海洋探测、攻防、情报监视与侦查等民用和军事领域具有极其广泛的应用前景。
2、目前,发展形成的水下对抗技术有三种,分别是以鱼雷为代表的硬杀伤对抗技术、以水声干扰为代表的软杀伤对抗技术和以水声隐身为代表的非杀伤对抗技术。传统的uuv目标识别愈来愈难以应对多变的海洋环境和复杂的对抗场景,因此,更加系统、深入地研究智能uuv目标识别与反对抗技术是提高未来智能uuv目标识别技术发展的核心。
3、现有的智能uuv目标识别作战效能评估一般是针对系统整体作出的,例如:通过adc法、层次分析法、云图法等一系列方法对uuv目标识别作战效能进行整体评估,导致对uuv目标识别作战效能的评估结果不精确。
技术实现思路
1、针对上述所描述的,传统的智能uuv目标识别作战效能评估一般是针对系统整体作出的,导致对智能uuv目标识别作战效能的评估结果不精确的技术问题。本发明提出了基于智能uuv目标识别与反对抗效能评估方法及评估模型。
2、本发明旨在利用层次分析法和熵权法相结合的方法确定效能指标体系的权重,同时利用逼近理想点法对探测能力指标、目标识别指标以及反对抗指标进行评价,本发明是通过多个指标,多维度进行分别评价,使得评价结果更加真实、准确,可为智能uuv目标识别与反对抗系统设计与优化提供参考。
3、本发明的技术方案如下:
4、基于智能uuv目标识别与反对抗效能评估方法,包括以下步骤:
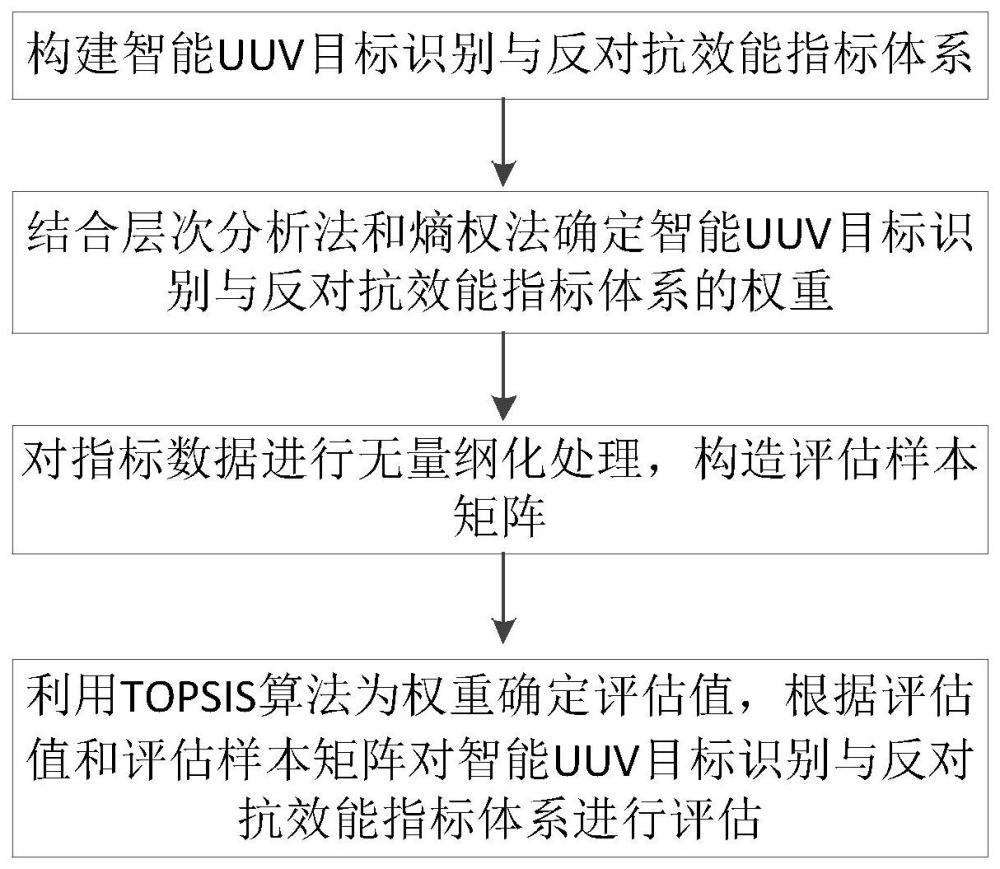
5、1)构建智能uuv目标识别与反对抗效能指标体系;
6、2)结合层次分析法和熵权法确定智能uuv目标识别与反对抗效能指标体系的权重;
7、3)对指标数据进行无量纲化处理,构造评估样本矩阵;
8、4)利用topsis算法为步骤2)所述的权重确定评估值,根据评估值和评估样本矩阵对智能uuv目标识别与反对抗效能指标体系进行评估。
9、进一步限定,所述步骤1)具体为:
10、构建智能uuv目标识别与反对抗效能指标体系的影响因素uc以及uc的影响因素ucd,将影响因素uc作为一级指标,将影响因素ucd作为二级指标,从而构建智能uuv目标识别与反对抗效能指标体系。
11、进一步限定,所述步骤2)具体为:
12、2.1)设定对象,其中,对象包括一级指标uc和二级指标ucd,c=1,2,…,p;d=1,2,…,q;建立各对象的原始数据矩阵,其中,p是一级指标的数量,q是各一级指标对应的二级指标的数量,p和q均为非零的自然数;
13、2.2)根据各对象的原始数据矩阵,利用层次分析法判断各对象的权重分值,得到一级指标的权重向量w0和二级指标的权重向量为w1、w2、w3、…、wq;
14、2.3)计算各权重的最大特征值λmax以及最大特征值λmax对应的归一化特征向量ωt,其中,归一化特征向量ωt对应的分量ω1为各对象的第一权重;
15、2.4)根据熵权法确定各对象的第二权重ω2;
16、2.5)根据各对象的第一权重ω1和各对象的第二权重ω2计算智能uuv目标识别与反对抗效能指标体系中各对象的权重ω,计算公式为:
17、
18、式中,为权重方案的组合系数,其值是最小化最优权重与各对象的权重,具体计算公式为:
19、
20、式中,是ω1的转置矩阵;是ω2的转置矩阵。
21、进一步限定,所述步骤2.4)具体为:
22、根据熵权法计算各对象的第二权重指标,设有n个对象进行比较,m个评估指标,第i个对象对应的第j个评估指标值为gij,i=1,2,…,n;j=1,2,…,m,其中,各对象的第二权重指标计算公式为:
23、
24、式中,e为各对象的第二权重指标;n为对象的数量,其值非零的自然数;其中,
25、根据各对象的第二权重指标计算各对象的第二权重ω2,计算公式为:
26、
27、式中,n为对象的数量,其值非零的自然数;e为各对象的第二权重指标;m是评估指标的数量,j是m个评估指标中的任意一个。
28、进一步限定,所述步骤3)具体为:
29、3.1)确定各对象的指标数据xij:
30、第i个对象对应的第j个评价指标数据为hij,对评价指标数据进行无量纲化,生成无量纲数据xij;
31、3.2)构造评估样本矩阵:
32、根据无量纲数据xij构造评估样本矩阵x,其中,x={xij};
33、式中,i=1,2,…,n;j=1,2,…,m。
34、进一步限定,所述步骤4)中评估值的确定过程为:
35、根据智能uuv目标识别与反对抗效能指标体系中各对象的权重ω,利用topsis算法确定各对象的权重ω对应的各对象的正理想点x+和各对象的负理想点x-;
36、计算各对象的正理想点x+对应的正欧几里得距离和各对象的负理想点x-对应的负欧几里得距离
37、根据正欧几里得距离和负欧几里得距离计算各对象的评估值ci,计算公式为:
38、
39、根据评估值ci和评估样本矩阵对智能uuv目标识别与反对抗效能指标体系进行评估。
40、进一步限定,所述正欧几里得距离和负欧几里得距离的计算过程分别为:
41、正欧几里得距离的计算公式为:
42、负欧几里得距离的计算公式为:
43、式中,m是评估指标的数量;j是m个评估指标中的任意一个;gij是第i个对象对应的第j个评估指标值,ω为各对象的权重。
44、进一步限定,
45、所述一级指标uc包括探测能力u1、目标识别能力u2和反对抗能力u3;
46、所述探测能力u1对应的二级指标u1d包括等效搜索范围u11、自导作用距离u12和探测扇面u13;
47、所述目标识别能力u2对应的二级指标u2d包括目标捕获距离u21、目标捕获时间u22和目标捕获概率u23;
48、所述反对抗能力u3对应的二级指标u3d包括航程消耗u31、抗脉冲压力值u32、距离误差u33、航向误差u34、分辨能力u35和有效攻击率u36。
49、基于智能uuv目标识别与反对抗效能评估模型,包括:
50、体系构建模块:用于构建智能uuv目标识别与反对抗效能指标体系;
51、权重确定模块:用于结合层次分析法和熵权法确定智能uuv目标识别与反对抗效能指标体系的权重;
52、评估样本矩阵构造模块:用于对指标数据进行无量纲化处理,构造评估样本矩阵;
53、以及评估模块:用于利用topsis算法为权重确定评估值,根据评估值对智能uuv目标识别与反对抗效能指标体系进行评估。
54、与现有技术相比,本发明的有益效果在于:
55、本发明基于智能uuv目标识别与反对抗效能评估方法,其利用层次分析法和熵权法相结合的方法确定效能指标体系的权重,同时利用逼近理想点法对探测能力指标、目标识别指标以及反对抗指标进行评价。本发明是通过多个指标,多维度进行分别评价,综合考虑智能uuv目标识别与反对抗技术的使用场景,使得评价结果更加真实、准确,可为智能uuv目标识别与反对抗系统设计与优化提供参考。
- 还没有人留言评论。精彩留言会获得点赞!