一种基于点云自动分类的输电线路树障隐患分析方法与流程
本发明属于输电线路巡检,具体涉及一种基于点云自动分类的输电线路树障隐患分析方法。
背景技术:
1、随着输电线路规模的不断扩大,大量线路地处山区、林区等树竹生长茂盛区域,树障对导线放电造成线路跳闸、线路停运等事故愈发频繁。更为严重的情况,若高压输电线路电弧放电引燃树枝,不仅会引发大面积火灾或停电事故,而且可能直接威胁到附近居民的人身安全。因此,如何及时有效发现隐患树障并提前采取相应的预控措施尤为关键。
2、传统的树障隐患信息的收集主要以巡线班组成员人工目测后记录为主,这依赖班组人员的巡视经验,效率低下且容易疏漏。随着近年来无人机技术的快速发展,使用无人机对输电线路走廊开展倾斜摄影,采集输电线路廊道内的可见光点云数据进行树线距离分析已得到越来越广泛的应用。然而,利用可见光点云数据分析树障隐患存在数据处理耗时长、精度差等问题。
3、机载lidar技术是采用无人机搭载激光雷达,利用激光测距技术和gps或北斗定位系统获取到高精度的点云坐标数据,大幅提高了三维空间中导线对廊道内树障距离的测量精度。但是,当前基于无人机采集的激光点云数据进行树线距离量测的准确率和效率极大受制于点云分类的准确性,大量错误分类的点云数据需要人工进行重新复核和校正,自动化程度低。
技术实现思路
1、为切实提高班组作业人员点云数据处理效率,解决当前输电线路树障隐患分析存在的量测准确率差、自动化水平低等问题,本发明提出了一种基于点云自动分类的输电线路树障隐患分析方法,实现对激光点云数据的自动化分类处理和对树障隐患信息的准确评估。
2、本发明采用如下技术方案实现:一种基于点云自动分类的输电线路树障隐患分析方法,包括以下步骤:
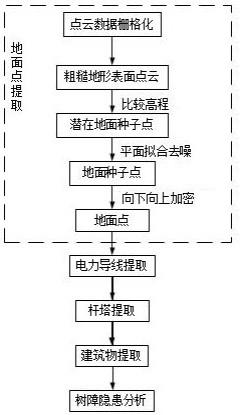
3、步骤s1、对无人机采集的激光点云数据进行栅格化;
4、步骤s2、使用点云库(point cloud library,pcl)对栅格化后的点云预处理,得到所有栅格中的最低点的集合pmin并进行形态学滤波去噪,得到粗糙地形表面点云,记作tsurf;
5、步骤s3、潜在地面种子点的提取:将集合pmin中各点的高程与tsurf进行比较,如果绝对高度差在0.5m内,则该点被确定为潜在地面种子点,并添加到潜在地面种子点集合gpotential;
6、步骤s4、地面种子点的提取:在每个栅格内获取潜在地面种子点的k个最邻近点,使用ransac方法将潜在地面种子点及距离其最近的k个点拟合出一个平面,采用平移平面拟合法消除非地面点,获得地面种子点;
7、步骤s5、地面点的提取:使用地面种子点构建不规则三角网(triangulatedirregular network,tin),采用不规则三角网向下加密和迭代不规则三角网向上加密的方法完成地面点的提取;
8、步骤s6、电力导线提取:依据点云栅格内点云的高度直方图,对杆塔和电力线进行粗提取,采用基于栅格的区域生长算法和基于坐标旋转的聚类算法对电力线进行精细化提取;
9、步骤s7、杆塔精细化提取:基于精细化提取的电力线点云,使用射线法剔除粗提取过程中满足高度阈值的假阳性杆塔点云,并基于二值图像掩码对杆塔附近的植被进行滤除,实现杆塔精细化提取;
10、步骤s8、建筑物提取:使用梯度分割法实现建筑物与植被的分离,利用形态学局部填充法和邻域迭代法处理分割后结果,恢复去除的边缘信息,最终使用面积阈值法去除剩余植被,实现建筑物区域的快速提取;
11、步骤s9、树障隐患分析:按照线路走廊方向以固定的间隔分割点云,将分割后局部区域的导线点云与区域内的植被、地面点、建筑等障碍物点云进行空间距离计算,实现树障隐患的快速分析。
12、进一步优选,步骤s2中,使用点云库对栅格化后的点云预处理,得到所有栅格中的最低点的集合pmin的过程如下:
13、s21、将栅格化后的点云数据定义为一个二值栅格,其中0代表无数据栅格,1代表其他栅格;
14、s22、共有n个无数据栅格,标记无数据栅格为wi,i=1,2,…,n;6个边界面分别为bi1、bi2、bi3、bi4、bi5、bi6,其中ai1、ai2、ai3、ai4、ai5、ai6分别为bi1、bi2、bi3、bi4、bi5、bi6边界面上的任一点,对应的法向量分别为、、、、、,依据公式(1)搜索与无数据栅格各边界面距离最近的点,记作pimin,1、pimin,2、pimin,3、pimin,4、pimin,5、pimin,6,它们的集合记作pimin;
15、(1);
16、其中,aij表示无数据栅格wi第j个边界面上的任一点,为无数据栅格wi第j个边界面上的法向量,pimin,j表示与无数据栅格wi第j个边界面距离最近的点,d表示点与边界面距离,表示点aij与点pimin,j所构成的向量,。
17、s23、比较集合pimin中所有点高程,其中的最低点作为无数据栅格wi的最低点;
18、s24、记录每个无数据栅格中的最低点,它们的集合记作pmin。
19、进一步优选,步骤s4所述使用ransac方法将潜在地面种子点及距离其最近的k个点拟合出一个平面,使用平移平面拟合法消除非地面点的过程如下:
20、s41、在三维空间中搜索潜在地面种子点集合gpotential中的每个潜在地面种子点pi及距离其最近的k个点,将潜在地面种子点pi及距离其最近的k个点的集合记作ppot,通过ransac方法获得局部拟合平面fa;
21、s42、采用平移平面拟合法消除非地面点:平行移动局部拟合平面fa使其通过潜在地面种子点pi得到一个新的平移平面fb,根据指标r判断潜在地面种子点pi是否属于地面种子点,指标r按公式(2)计算:
22、(2);
23、其中dis(ppot,i,fb)是潜在地面种子点pi和新的平移平面fb的距离。如果指标r大于阈值,则将潜在地面种子点pi点判定为非地面种子点,并从潜在地面种子点集合gpotential中删除;潜在地面种子点集合gpotential中的其余点将添加到地面种子点集合gseeds。
24、进一步优选,步骤s5所述使用地面种子点构建不规则三角网,采用不规则三角网向下加密和迭代不规则三角网向上加密的方法完成地面点的提取的具体步骤如下:
25、s51、将地面种子点集合gseeds用于构造初始的基于不规则三角网的数字地面模型(digital terrain model,dtm),为了确保所有点都位于不规则三角网中,选择点云场景边界的四个角作为模拟地面点,并加入到地面种子点集合gseeds中以创建不规则三角网;
26、s52、设置一个d1宽度的缓冲区用于扩展数据处理区域,沿缓冲区外边界,将模拟地面点以固定间隔d2布置,解决不规则三角网边缘效应问题;
27、s53、设置模拟地面点的高程与地面种子点集合gseeds中最近点的高程相同,并使用模拟地面点和地面种子点集合gseeds生成初始的基于不规则三角网的数字地面模型;
28、s54、采用不规则三角网向下加密,将错误分类的非地面点重新归为地面点,使未分类点位于不规则三角网之上,提高初始数字地面模型的质量;
29、s55、采用迭代不规则三角网向上加密,根据三角面上方的点距离三角面的距离和点与三角形三个顶点的角度设置阈值进行迭代,获得不规则三角网表面的点,这些点归类为地面点,完成地面点提取。
30、进一步优选,步骤s6的具体步骤如下:
31、s61、在三维空间直角坐标系oxyz上,将杆塔平面投影至xoy平面上的大小作为投影单元,将点云按照投影单元的大小划分为不同点云单元;
32、s62、根据每个点云单元内的高度直方图对电力线和杆塔进行粗提取,点云沿垂直方向连续分布且高于设定阈值的点云单元提取为杆塔,点云高度超过设定阈值且沿垂直方向分布不连续、有明显空层的点云单元提取为架空导地线;
33、s63、采用基于栅格的区域生长算法对假阳性电力线点(错误分类为电力线的其他点)进行校正;
34、s64、基于坐标旋转及聚类算法对假阴性电力线点(错误分类为其他点的电力线点)进行校正;
35、s65、基于每相导线的电力线点云,根据非线性最小二乘法,拟合求解导线悬链线方程,使用该方程补全导线缺失部分;
36、s66、以导线半径作为阈值,按拟合后的导线方向将邻域中距离拟合线小于阈值的点重新归类为电力线点,进一步降低电力线点云假阴性率。
37、进一步优选,步骤s63采用基于栅格的区域生长算法对假阳性电力线点进行校正的过程为:将候选电力线的点云单元作为3×3栅格的中心单元,相邻的8个单元中的非电力线点作为种子,并根据三维空间欧氏距离进行生长,如果中心单元中的点与非电力线种子点一起生长,则中心单元中的点将被重新提取为非电力线点。
38、进一步优选,步骤s64基于坐标旋转及聚类算法对假阴性电力线点进行校正的具体步骤如下:
39、1)基于坐标旋转的方法,将电力线点投影到垂直于导线方向的平面内,假设是导线和y轴之间的角度,沿xoy平面旋转电力线点,角度为,然后沿着y轴将电力线点投影到xoz平面;这样,属于同一导线的点在xoz平面上聚合成一个簇,而不同导线的点分散成不同的簇;
40、2)用矩阵w1表示与对应的旋转矩阵,矩阵w2表示为将三维坐标点沿y轴投影到xoz平面的投影矩阵。则坐标旋转变换矩阵w表示为两个变换的乘积:
41、(3);
42、3)px、py和pz,表示投影前电力线点p的三维坐标,px和py表示投影后电力线点p的二维坐标,可以由旋转坐标变换矩阵w得到;公式如下:
43、(4);
44、通过使用式(4)变换电力线点,属于同一导体点的分布变得更加集中,而属于不同导体的点则更加分散;
45、4)投影后电力线点pj与投影后电力线点pi属于同一条直线的概率用高斯函数表示如下:
46、(5);
47、其中为导线的半径,表示投影后电力线点pi的横坐标, 表示投影后电力线点pi的纵坐标, 表示投影后电力线点pj的横坐标, 表示投影后电力线点pj的纵坐标,表示投影后电力线点pj与投影后电力线点pi属于同一条直线的概率,越大,投影后电力线点pj与投影后电力线点pi属于同一条直线的概率越大,当超过阈值,则判定投影后电力线点pj与投影后电力线点pi属于同一条直线,实现同一相电力线点云的正确分类;
48、5)针对区域生长后校正为非电力线的点pk,使用表示点集中在点pk的概率,可以通过求和点pk周围所有点的高斯函数来计算;公式如下:
49、(6);
50、其中n是3×3单元栅格中的电力线点总数,表示点pk与点pj属于同一条直线的概率;越大,点pk属于假阴性的概率越大,当超过阈值,则判定点pk属于假阴性,完成对假阴性电力线点云的校正。
51、进一步优选,步骤s7所述杆塔精细化提取的过程如下:
52、s71、对于分类为杆塔的网格单元,提取其3×3邻域网格单元边界与电力线相交形成的凸多边形;
53、s72、从粗提取的杆塔网格单元几何中心引出一条射线,将该射线沿任意方向射出,计算射线与凸多边形各边的交点个数;
54、s73、当交点个数存在奇数个时,则点在凸多边形内,该点所在单元格为杆塔单元格;当交点个数存在偶数个时,则点在凸多边形外,该点所在单元格为假阳性杆塔单元格,则滤除该单元格, 实现对满足高度阈值的假阳性杆塔点云的剔除;
55、s74、在杆塔点云单元格范围内,将点云按照高度沿z轴方向按指定厚度切片,对切片进行二值图像化处理,即将切片对应的空间三维点云坐标投影至xoy平面,形成二值图像掩码;
56、s75、计算得到各切片的连通分量,对相邻切片的连通分量进行求交测试,保留相交的连通分量,即投影在连通分量内且与相邻切片联通分量相交的点云保留,其他剔除;
57、s76、对求交后的结果依次再进行求交测试,迭代计算,实现对杆塔周围的植被滤除,完成杆塔精细化提取。
58、本发明中所涉及的一种基于点云自动分类的输电线路树障隐患分析方法,具备以下预期效果:1)点云滤波去噪效果好。由于激光点云采集过程中受地形和光线的影响,导致出现部分区域点云稀疏的情况,采用栅格化点云进行预处理和形态学滤波去噪的方法可以有效提高滤波结果的准确性。2)点云分类精度高。传统的聚类方法容易对属于不同导线的电力线点进行错误分类,本发明采用坐标旋转的方法对聚类结果进行校正,有效降低了电力线点云的假阴性率;使用射线法和二值图像掩码实现杆塔点云的精细化提取,有效降低了杆塔点云的假阳性率。3)树障研判结果准确度高。点云自动分类后进行树障隐患研判,显著提升了班组人员的点云数据处理效率和通道树障隐患辨识水平。
- 还没有人留言评论。精彩留言会获得点赞!