一种改进的遥感图像重捕检测分析方法与流程
本发明属于人工智能,具体为一种改进的遥感图像重捕检测分析方法。
背景技术:
1、当前随着卫星技术逐步细分应用领域,在民用导航、遥感图像等领域进入相对成熟的应用时期。例如,针对遥感图像处理而言,对图像的检测是决定后端应用的重中之重的关键环节,在地形、地貌、建筑物以及海上船只的检测等方面越来越成为专项服务开发研究人员进行图像重捕和图像检测的热点领域。当前对于遥感图像的重捕检测分析,不同学者从不同的角度进行过大致的分类,但又有交叉,尚未形成一致的意见。常见的方法有可视化分析方法、代数运算方法和变换类方法等,其中代数运算方法应用相对广泛。代数运算方法包括图像差分、图像比值、图像回归方法、图像植被指数差分、变化矢量分析和背景相减等方法。
2、但是现有相关的技术应用中,多数情况存在连续遥感图像检测时间过长、图像重捕后难以继续关联前次检测结果以及图像重捕后检测对象参数分析错误等问题,很大程度上影响了图像重捕检测分析的效果。
3、为了攻克现有技术中的上述不足,本技术提供了一种改进的图像重捕检测分析方法,能够将图像重捕后的分析过程进行分解,缩短检测分析时间,完成重捕后检测对象与前次检测信息的关联,进而开展检测对象的参数估计工作。
技术实现思路
1、本发明的目的在于:为了解决上述提出的问题,提供一种改进的遥感图像重捕检测分析方法。
2、本发明采用的技术方案如下:一种改进的遥感图像重捕检测分析方法,所述改进的遥感图像重捕检测分析方法包括以下步骤:
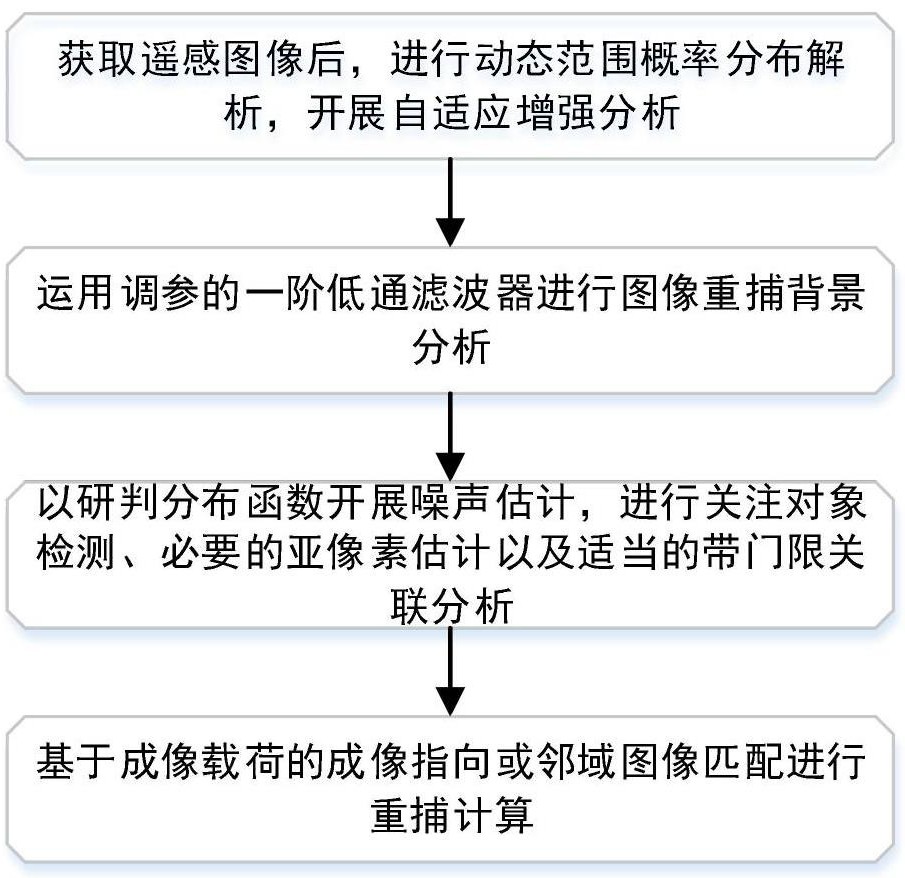
3、s1:开展自适应图像增强分析;
4、s2:开展有针对性的图像重捕背景分析;
5、s3:开展重捕后图像的检测;
6、s4:进行重捕计算,使用基于成像载荷指向的目标重捕方法:
7、假设当前遥感图像成像的指向东西角和南北角为(ewanglen,snanglen),关注对象的位置为(xn,yn),变动前遥感图像成像的指向东西角和南北角为(ewanglen-1,snanglen-1),目标位置为(xn-1,yn-1);
8、假定目标处于中心位置,m为传感器数目,n为遥感图像视场角度,则应该满足如下条件:
9、
10、当目标不处于中心位置是
11、
12、通过大量实测数据进行拟合得到:
13、
14、则当前关注对象位置,可以通过当前相机指向角,和上一个视场的目标位置和指向角来计算,即:
15、
16、在一优选的实施方式中,所述步骤s1中,基于遥感图像数据进行验证分析,对遥感图像分析后将分布函数记作f(x),即:
17、f(x)=p(ξ≤) (0≤x≤4095) (1.1.1)
18、其中p表示满足一定条件的分布概率值,假定将分布值大于f1的分布区间记为[x1,x2],则该区间的分布概率为
19、px1~x2=f(x2)-f(x1) (1.1.2)
20、求得区间后,将此区间作为图像增强显示的主值区间,可以看到更清晰的背景轮廓,提供了更多可供目视观测的信息量。
21、在一优选的实施方式中,所述步骤s2中,遥感图像的背景时域一般具有缓变特性,缓变是一个相对的概念,针对特定的应用场景,例如海上船只移动,区域内背景的变化相对目标变化是缓慢的。
22、在一优选的实施方式中,所述步骤s2中,针对不同的像素,选取一定时间内遥感图像数据进行统计,从时域和概率分布上进行分析,单个像元一定时间内的缓慢变化,基本服从正态分布,故提出一阶低通滤波器来进行背景估计,记为:
23、bgn(x,y)=k×imagen(x,y)+(1-k)×bgn-1(x,y) (1.2.1)
24、其中x,y分别表示列号和行号,n代表时刻,bgn(x,y)代表当前时刻的背景估计值,inagen(x,y,t)代表当前帧的图像,k代表低通滤波系数,bgn-1(x,y)代表前一时刻的背景估计值;取一段时间的图像数据求均值,作为初始状态:
25、bg0(x,y)=mean[image0(x,y,t)] (1.2.2)
26、其中inage0(x,y,t)表示取一段时间的图像数据;通过仿真来获得低通滤波系数k的最优取值区间;对比遥感图像与背景估计的接近程度,选取滤波效果最佳值,使得背景估计更接近实测图像。
27、在一优选的实施方式中,所述步骤s3中,包括进行遥感图像的噪声估计;对各遥感图像中的像素稳定性进行统计分析;主要方法是对特定区域的稳定遥感图像数据进行进行分析,将获得的图像数据记为h(x,y,t),其中x,y分别表示列号和行号,t代表时间,从分布形态上进行分布趋势研判,确定分布函数;按时间维度对冷空背景求方差,用每个像素的方差来表示其数据值与真实值之间的偏离关系,记为:
28、σ2(x,y)=var[h(x,y,t),3] (2.1.4)
29、记噪声随机变量为xniose,则有
30、xniose(x,y)~n(0,σ2(x,y)) (2.1.5)
31、噪声均值为0。
32、在一优选的实施方式中,所述步骤s3中,还需要进行关注对象的检测;对遥感图像而言,一般有:
33、imagen(x,y)=targetn(x,y)+bgn-1(x,y)+xniose(x,y) (2.1.6)
34、其中x,y分别表示列号和行号,n代表时刻,imagen(x,y)表示当前帧图像,targetn(x,y)表示当前帧图像中的目标信号分量,bgn-1(x,y)表示通过一阶低通滤波器获得的背景估计值,xniose(x,y)表示随机变量噪声;
35、由于随机变量xniose(x,y)服从均值为0,噪声为σ2(x,y)的正态分布,令
36、
37、则随机变量ximage(x,y)服从标准正态分布,记为:
38、ximage(x,y)~n(0,1) (2.1.8)令
39、
40、则随机变量xtarget(x,y)服从均值为targetn(x,y),方差为σ2(x,y)的正态分布,记为:
41、xtarget(x,y)~n(targetn(x,y),1) (2.1.10)
42、以xtarget(x,y)为检测判决量,取检错概率pfa,则相应的检测概率pd,令检测门限为threshold,则:
43、pfa=1-φ(threshold) (2.1.11)
44、那么:
45、threshold=φ-1(1-pfa)threshold=φ-1(1-pfa) (2.1.12)。
46、在一优选的实施方式中,所述步骤s3中,还需要进行进行必要的亚像素估计;遥感图像当中关注对象如船只、地面建筑物、海陆边界等信息一般并非以单个像素的形式出现,往往是一个大块区域;为了获得相对精确的对象位置和状态,有必要进行亚像元估计;本技术提出一种基于信噪比加权的方法进行亚像元估计;令遥感图像各像素的信噪比snrn(x,y)为:
47、
48、则有:
49、
50、令plaqn(x0,y0)为大块区域中各像素的集合,(x0,y0)为关注对象对应的列号和行号,则有
51、plaqn(x0,y0)={xtarget(x,y)>threshold} (2.2.4)
52、令snrsum为大块区域内所有像素的信噪比之和,记为:
53、
54、令行坐标加权求和为y0,列坐标加权求和为x0,则有:
55、
56、
57、令大块区域位置列号和行号的估计值为(xn,yn),那么:
58、
59、
60、在一优选的实施方式中,所述步骤s3中,还需要进行进行适当的关联分析;令目标位置为pos(n),该像素位置取通过信噪比加权获得的目标亚像元位置,记为:
61、pos(n)=(xn,yn) (2.3.1)
62、则目标运动的瞬时速度为:
63、vel(n)=pos(n)-pos(n-1) (2.3.2)
64、vel_delt(n)=vel(n)-vel(n-1) (2.3.3)
65、速度大小相对变化率为
66、vel_amp_rate(n)=|vel_delt(n)|/|vel(n)| (2.3.4)
67、速度方向变化为
68、vel_vec_rate(n)=cos-1vel_delt(n) (2.3.5)
69、目标面积为:
70、area(n)=crad[plaqn(x0,y0)] (2.3.6)
71、相邻帧面积变化为:
72、area_delt(n)=|area(n)-area(n-1)| (2.3.7)
73、area_rate(n)=|area_delt(n)/area(n) (2.3.8)。
74、根据实测场景计算数据,轨迹关联需要满足一定的约束条件,满足则进行帧间关联;反之则不进行关联。
75、在一优选的实施方式中,所述步骤s4中,也可以使用基于邻域图像匹配的目标重捕方法:
76、邻域图像匹配主要是采用二维相关的方法,在前后遥感图像中找出最相似的领域;假设上一个遥感图像的对象位置为(xn-1,yn-1),取邻域的半径为λ;
77、corr2[imagen(x±λ,y±λ),imagen-1(xn-1±λ,yn-1±λ)] (2.5.6)
78、其中,imagen(x±λ,y±λ)表示以(x,y)为中心,以λ为半径的矩形邻域,那么当(x,y)越接近真实目标时,式(2.5.6)的值越大;
79、通过基于遥感图像成像指向的目标重捕方法,估算得到目标出现的位置约为(xn,yn),令搜索半径为η,那么
80、
81、求得r(x,y)的最大值rmax:
82、rmax=max(r(x,y)) (2.5.8)
83、令:
84、r(xα,yβ)=rmax (2.5.9)
85、则(xα,yβ)为基于邻域图像匹配的目标重捕方法估计的目标在当前帧图像中的真实位置。综上所述,由于采用了上述技术方案,本发明的有益效果是:
86、1、本发明中,提出两种遥感图像的重捕方案,解决了检测对象参数分析错误和解析不完全的短板;通过基于概率分布趋势研判和关联管理算法,高效进行图像重捕后继续关联前次检测结果的匹配;采用序贯组合分解图像检测的方式进行操作,有效缩短遥感图像检测时间过长的问题通过良好的遥感图像重捕检测对象参数分析和解析性能。申请通过基于成像载荷指向、基于邻域图像匹配的两种目标重捕方法,以遥感图像数据拟合和二维相关为基础,计算解决图像重捕过程中检测对象参数分析错误和解析不完全的问题;二是优秀的图像重捕后继续关联表现。通过基于概率分布趋势研判和关联管理算法,高效进行图像重捕后继续关联前次检测结果的匹配;三是遥感图像检测时效性高。申请采用序贯组合分解图像检测的方式进行操作,有效缩短遥感图像检测时间过长的问题,提高遥感图像重捕检测时效性。
- 还没有人留言评论。精彩留言会获得点赞!