一种跟踪对象的确定方法、系统及跟踪方法、系统与流程
本发明涉及目标跟踪领域,尤其是涉及一种跟踪对象的确定方法、系统及跟踪方法、系统。
背景技术:
1、在行人检测领域中,通常会采用超宽带感应器对行人进行检测定位,此外采用超宽带感应器方式对行人进行定位时通常使用aoa(angle of arrival)方法,该方法在理想状态下定位精度可以达到5cm,5°,但是由于超宽带感应器的信号在狭窄场景或者被遮挡时会发生衰减,致使超宽带感应器对行人的定位精度大幅度的降低,计算出来的行人位姿准确度低,使得对行人的检测定位的稳定性难以得到保证。与此同时,在对行人进行实时的跟踪过程中,由于超宽带感应器的定位精度不够准确,行人相对于机器人的位姿也会不够准确,后续机器人难以稳定的对行人进行跟踪,多次出现行人跟踪失败,跟踪丢失的情况,机器人会出现频繁的转向来寻找需要跟踪的行人,导致导航跟随效果无法满足实际中的需求。
技术实现思路
1、本发明的目的是提供一种跟踪对象的确定方法、系统、介质和设备,还提供了一种跟踪对象的跟踪方法、系统、介质和设备,来解决现有技术中存在的上述技术问题,主要包括以下几个方面:
2、本技术第一方面提供了一种跟踪对象的确定方法,包括如下步骤:
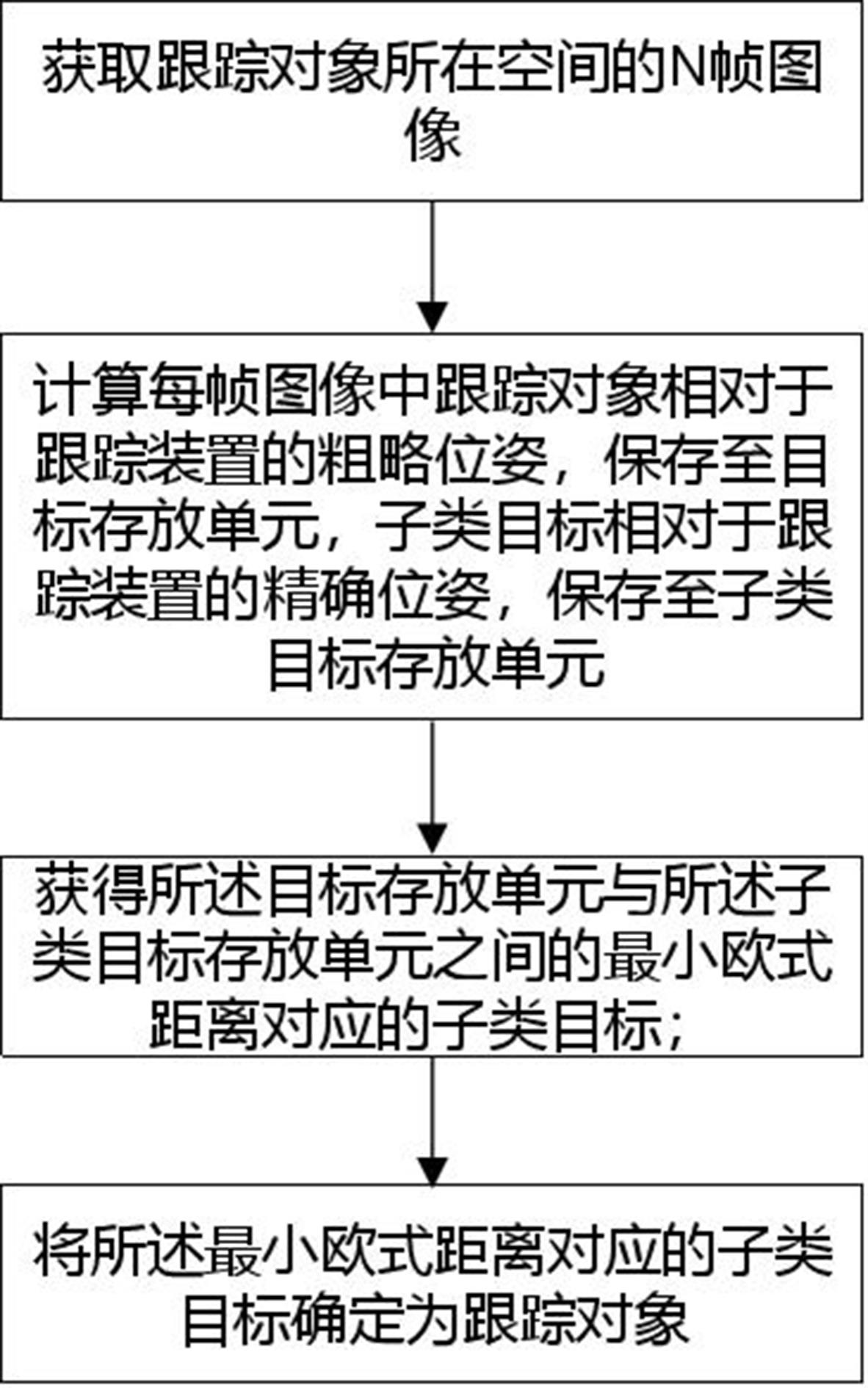
3、获取跟踪对象所在空间的n帧图像,其中n为整数,且n>1;
4、计算每帧图像中跟踪对象相对于跟踪装置的粗略位姿,将所述粗略位姿保存在目标存放单元中;计算每帧图像中多个子类目标相对于所述跟踪装置的精确位姿,将所述精确位姿保存在对应的每个子类目标存放单元中;其中,所述粗略位姿为通过第一定位方法获得的跟踪对象相对于所述跟踪装置的位姿;所述精确位姿为通过第二定位方法获得的跟踪对象相对于所述跟踪装置的位姿;所述子类目标通过第一帧图像获得;
5、根据所述目标存放单元与所述子类目标存放单元,获得所述目标存放单元与所述子类目标存放单元之间的最小欧式距离对应的子类目标;
6、将所述最小欧式距离对应的子类目标确定为跟踪对象。
7、进一步地,获取跟踪对象所在空间的n帧图像的方法如下:
8、对跟踪装置安装超宽带感应器基站和激光雷达,对跟踪对象布置超宽带感应器标签;
9、所述跟踪装置采集所述跟踪对象所在空间的n帧图像,每帧图像中包括所述激光雷达发射产生的激光点云。
10、进一步地,所述子类目标通过第一帧图像获得方法如下:
11、以跟踪对象在第一帧图像中的粗略位姿为圆心,超宽带感应器定位误差为半径,对所述第一帧图像中的激光点云进行过滤和索引,获得多个子类目标。
12、进一步地,每帧图像中多个子类目标相对于所述跟踪装置的精确位姿计算方法如下:
13、分别以第n-1帧图像中每个子类目标的精确位姿为圆心;
14、以第n-1帧图像与第n帧图像之间的时间间隔与跟踪对象的移动速度之积为半径,对第n帧图像中的激光点云进行过滤,计算每帧图像中每个子类目标相对于跟踪装置的精确位姿。
15、本技术第二方面提供了一种跟踪对象的跟踪方法,包括如下步骤:
16、根据如上述的跟踪对象的确定方法获得跟踪对象;
17、跟踪装置采用激光雷达对跟踪对象进行跟踪。
18、进一步地,跟踪装置采用激光雷达对跟踪对象进行跟踪后还包括:
19、更新目标存放单元和多个子类目标存放单元,所述目标存放单元与多个所述子类目标存放单元可容纳的最大列数为p;
20、若目标存放单元和所述子类目标存放单元需要存储的列数f大于最大列数p列时,则清除目标存放单元和所述子类目标存放单元中的前f-p列,分别获得目标更新存放单元和子类目标更新存放单元;
21、对所述目标更新存放单元和子类目标更新存放单元进行加权,获得目标加权存放单元和子类目标加权存放单元。
22、进一步地,还包括:
23、采用二范数分别计算所述目标加权存放单元与跟踪对象对应的子类目标加权存放单元之间的距离的变化趋势;
24、若变化趋势大于变化趋势阈值,则重新确定跟踪对象进行跟踪。
25、本技术第三方面提供了一种跟踪对象的确定系统,包括如下模块:
26、图像获取模块:获取跟踪对象所在空间的n帧图像,其中n为整数,且n>1;
27、位姿计算模块:计算每帧图像中跟踪对象相对于跟踪装置的粗略位姿,将所述粗略位姿保存在目标存放单元中;计算每帧图像中多个子类目标相对于所述跟踪装置的精确位姿,将所述精确位姿保存在对应的每个子类目标存放单元中;其中,所述粗略位姿为通过第一定位方法获得的跟踪对象相对于所述跟踪装置的位姿;所述精确位姿为通过第二定位方法获得的跟踪对象相对于所述跟踪装置的位姿;所述子类目标通过第一帧图像获得;
28、对象确定模块:根据所述目标存放单元与所述子类目标存放单元,获得所述目标存放单元与所述子类目标存放单元之间的最小欧式距离对应的子类目标;将所述最小欧式距离对应的子类目标确定为跟踪对象。
29、本技术第四方面提供了一种跟踪对象的跟踪系统,包括如下模块:
30、跟踪对象获得模块:根据上述的跟踪对象的确定方法获得跟踪对象;
31、跟踪模块:跟踪装置采用激光雷达对跟踪对象进行跟踪。
32、本技术第五方面提供了一种可读存储介质,用于存储程序,所述存储程序被执行时,用于实现上述的跟踪对象的确定方法,或用于实现上述的跟踪对象的跟踪方法。
33、本技术第六方面提供了一种电子设备,包括一个或多个处理器;存储器,其上存储有一个或者多个程序;当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现上述的跟踪对象的确定方法,或用于实现上述的跟踪对象的跟踪方法。
34、本发明相对于现有技术至少具有如下技术效果:
35、当跟踪装置在跟踪对象采用超宽带感应器跟踪的跟踪对象位于狭窄场景或被遮挡等情况,超宽带感应器信号变弱,跟踪装置获得的跟踪对象定位不准确,会出现误跟踪或者丢失跟踪对象的情况。本技术提供的跟踪对象的确定方法,通过超宽带感应器对应的定位方法计算出应该跟踪的跟踪对象的粗略位姿,然后通过激光雷达来获得有可能是跟踪对象的子类目标,最后通过两个方法之间的不断约束计算,在子类目标中确定出真正的跟踪对象。
36、本技术中,通过计算目标存放单元与子类目标存放单元之间的欧式距离,可以准确找到与跟踪对象运动趋势相同的子类目标。即通过最小欧式距离即可找到与跟踪对象运动趋势相同的子类目标,该子类目标即为跟踪装置需要跟踪的对象,跟踪对象的确定方法简单,且精确度高。
37、超宽带感应器对应的跟踪方法和激光模式的跟踪方法二者相互约束和结合,可以保证在对跟踪对象的实时跟踪过程中,基本处于高精度、稳定性良好的激光跟踪模式,即使偶尔出现激光模式误跟踪的情况,通过超宽带感应器对应的跟踪方法也能完成校准,保证跟踪的过程中跟踪对象不丢失。
38、需要说明的是,本公开所涉及的信息(包括但不限于用户设备信息、用户个人信息等)、数据(包括但不限于用于分析的数据、存储的数据、展示的数据等)以及信号,均为经用户授权或者经过各方充分授权的,且相关数据的收集、使用和处理需要遵守相关国家和地区的相关法律法规和标准。例如,本公开中涉及到的多媒体资源等都是在充分授权的情况下获取的。
- 还没有人留言评论。精彩留言会获得点赞!