基于语义理解的随机轨迹生成方法、装置、设备及介质与流程
本技术涉及自动化加工,尤其是一种基于语义理解的随机轨迹生成方法、装置、设备及介质。
背景技术:
1、金属的自然氧化是一种复杂的表面效果,它无法通过简单的模型或参数来描述。这种表面效果通常具有随机性和不确定性,因为它的发生和发展受到许多因素的影响,如环境条件、材料性质、温度和湿度等。在自然氧化过程中,表面会形成一层氧化物薄膜,这层薄膜可以改变材料的性质和外观,如颜色、硬度、耐磨性和耐腐蚀性等。这种氧化物薄膜的厚度和组成会随着时间和环境条件的变化而变化,因此自然氧化表面效果的形状、颜色和纹理也会随之变化,这种随机性和不确定性效果通常是用采用语言描述。金属工艺品的做旧处理是指将金属表面加工成模拟自然氧化的形态,这种工艺多采用人工处理,以保证金属表面的纹路、色泽呈现一种自然、随机、无明显人为处理的效果。由于是人工加工,必然存在个体差异,这种差异正好是做旧处理所需要的,但这种做旧工艺的劳动强度较高,长期工作有患职业病的风险。为了减轻劳动强度,行业希望可以利用机器人来代替人工。
2、然而机器人作为一种替代人工的自动化设备,通常是代替人工完成高度重复的任务,对于前述需要具有随机性的加工处理,目前还没有解决方法。总的来说,采用机器人加工的方式存在以下问题:1)机器人加工的路径不能有明显的规律,也就是说需要机器人按照无规律的路径加工金属表面;2)机器人加工的路径,除了在空间上随机,也应该保证在时间上的随机行,也就是说,机器人对不同的工件,所加共的路径不能相同。
技术实现思路
1、有鉴于此,本技术提供一种基于语义理解的随机轨迹生成方法、装置、设备及介质,用于解决金属自然氧化的形态只能用语言近似概括,而难以参数化描述的问题,从而可以让机器人能够高效地生成无规律的随机轨迹,以模拟金属表面自然氧化产生的形态。
2、本技术的一方面提供了一种基于语义理解的随机轨迹生成方法,包括:
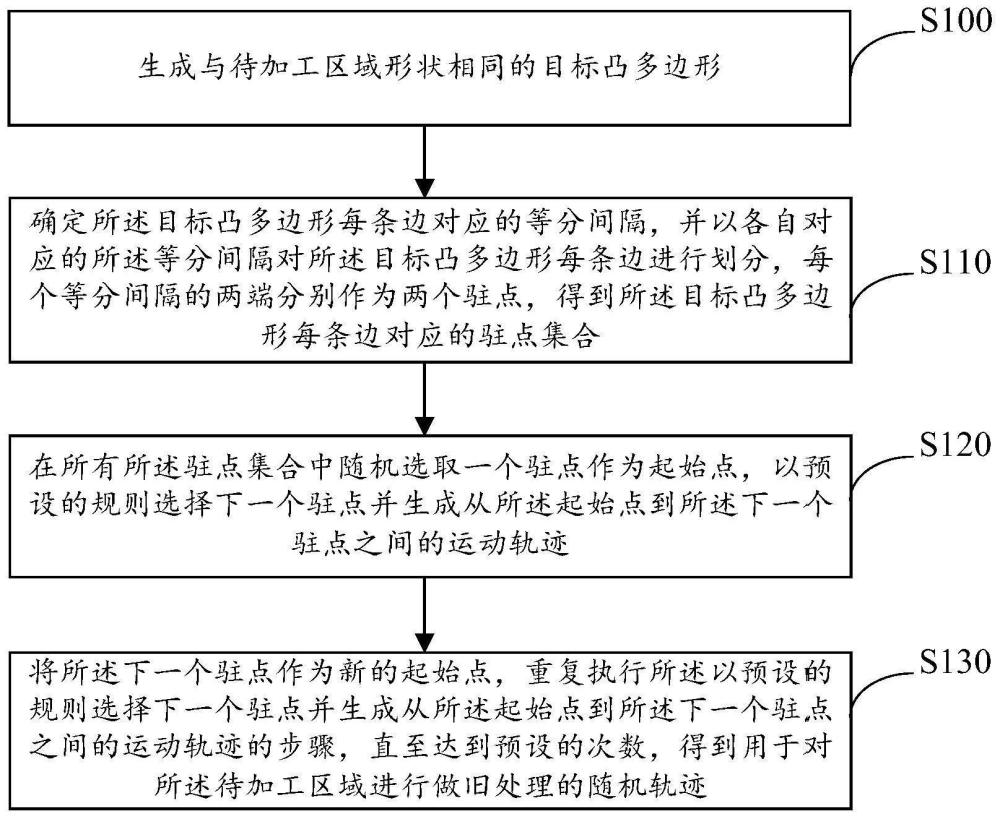
3、生成与待加工区域形状相同的目标凸多边形;
4、确定所述目标凸多边形每条边对应的等分间隔,并以各自对应的所述等分间隔对所述目标凸多边形每条边进行划分,每个等分间隔的两端分别作为两个驻点,得到所述目标凸多边形每条边对应的驻点集合;
5、在所有所述驻点集合中随机选取一个驻点作为起始点,以预设的规则选择下一个驻点并生成从所述起始点到所述下一个驻点之间的运动轨迹;
6、将所述下一个驻点作为新的起始点,重复执行所述以预设的规则选择下一个驻点并生成从所述起始点到所述下一个驻点之间的运动轨迹的步骤,直至达到预设的次数,得到用于对所述待加工区域进行做旧处理的随机轨迹。
7、可选地,所述生成与待加工区域形状相同的目标凸多边形,包括:
8、若所述待加工区域为凸多边形,则提取所述待加工区域的各个顶点;根据所述各个顶点确定所述待加工区域的中心点,并确定每个顶点与所述中心点之间的连线角度;按照连线角度从小到大对各个顶点进行排序,依次连接排序后的各个顶点,得到与所述待加工区域形状相同的目标凸多边形;
9、若所述待加工区域为凹多边形,则将所述待加工区域分割为多个凸多边形的待加工子区域,并提取每个所述待加工子区域的各个顶点;根据所述各个顶点确定各个所述待加工子区域的中心点,并确定每个顶点与对应中心点之间的连线角度;按照连线角度从小到大对各个所述待加工子区域的各个顶点进行排序,依次连接排序后的各个顶点,得到与各个所述待加工子区域形状相同的目标凸多边形。
10、可选地,所述提取所述待加工区域的各个顶点,包括:
11、通过对工业机器人进行示教操作提取所述待加工区域的各个顶点;
12、所述提取每个所述待加工子区域的各个顶点,包括:
13、通过对工业机器人进行示教操作提取每个所述待加工子区域的各个顶点。
14、可选地,所述确定所述目标凸多边形每条边对应的等分间隔,包括:
15、根据加工工具的覆盖半径和加工次数确定初始间隔;
16、根据所述初始间隔和所述目标凸多边形每条边的长度,确定每条边对应的等分间隔。
17、可选地,所述在所有所述驻点集合中随机选取一个驻点作为起始点,以预设的规则选择下一个驻点并生成从所述起始点到所述下一个驻点之间的运动轨迹,包括:
18、利用随机数在所有所述驻点集合中随机选取一个驻点作为起始点;
19、排除所述起始点所在的边,在其余边的驻点中利用随机数再次选择一个驻点,作为下一个驻点;
20、生成从所述起始点到所述下一个驻点之间的运动轨迹。
21、可选地,所述运动轨迹包括直线、虚线或曲线;
22、所述生成从所述起始点到所述下一个驻点之间的运动轨迹,包括:
23、在所述起始点到所述下一个驻点之间生成直线、虚线或曲线中的其中之一,作为运动轨迹。
24、可选地,所述待加工区域为金属表面,所述方法还包括:
25、将所述目标凸多边形的面积确定为与所述金属表面的面积相等;
26、将完全内含于所述目标凸多边形的所述随机轨迹刻录于所述金属表面上,以使所述随机轨迹覆盖整个所述金属表面。
27、本技术的另一方面还提供了一种基于语义理解的随机轨迹生成装置,包括:
28、第一单元,用于生成与待加工区域形状相同的目标凸多边形;
29、第二单元,用于确定所述目标凸多边形每条边对应的等分间隔,并以各自对应的所述等分间隔对所述目标凸多边形每条边进行划分,每个等分间隔的两端分别作为两个驻点,得到所述目标凸多边形每条边对应的驻点集合;
30、第三单元,用于在所有所述驻点集合中随机选取一个驻点作为起始点,以预设的规则选择下一个驻点并生成从所述起始点到所述下一个驻点之间的运动轨迹;
31、第四单元,用于将所述下一个驻点作为新的起始点,重复执行所述以预设的规则选择下一个驻点并生成从所述起始点到所述下一个驻点之间的运动轨迹的步骤,直至达到预设的次数,得到用于对所述待加工区域进行做旧处理的随机轨迹。
32、本技术的另一方面还提供了一种电子设备,包括处理器以及存储器;
33、所述存储器用于存储程序;
34、所述处理器执行所述程序实现所述的方法。
35、本技术的另一方面还提供了一种计算机可读存储介质,所述存储介质存储有程序,所述程序被处理器执行实现所述的方法。
36、本技术还公开了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。电子设备的处理器可以从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该电子设备执行上述的方法。
37、本技术通过生成与待加工区域形状相同的目标凸多边形,并根据目标凸多边形每条边上的驻点生成随机轨迹,该随机轨迹可用于生成随机的表面路径,适用于一些表面处理需要呈现出无规律纹理的工艺,本技术能够方便地应用在常见的工业机器人上,不需要配置额外的计算设备。而且,本技术还可以将三维面展开为二维形状,进而应用本技术生成三维面所需的随机轨迹。
- 还没有人留言评论。精彩留言会获得点赞!