一种用于煤矿井筒检修的罐笼上下行程检测方法及系统与流程
本发明涉及罐笼上下行程检测领域,具体为一种用于煤矿井筒检修的罐笼上下行程检测方法。
背景技术:
1、煤矿井筒作为煤矿开采过程中人员进出的重要通道,深度一般在1km以上,需要借助于罐笼进行人员的装载,因此在煤矿开采过程中需要通过各种方式对井筒内壁进行检修以保证井筒内壁的安全性,在工人通过罐笼进入到不同深度的矿洞中时,一般是通过位移检测装置如位移传感器大致检测钢丝绳的移动距离并配合设置在各个矿洞相对应位置的传感器实现对罐笼位置的精确定位,保证人员正常进出的安全。
2、但是由于井筒内壁的故障点是随机产生的,因此故障点的位置具有不确定性,而单独通过位移检测装置来控制罐笼的行程容易在长距离的升降过程中产生较大误差,难以准确到达故障点所在的高度,而由于井筒内的视线较差,在误差较大的情况下给检修人员准确快速的找到故障点带来了困难。
技术实现思路
1、针对现有技术的不足,本发明提供了一种用于煤矿井筒检修的罐笼上下行程检测方法,解决了在井筒检修的过程中仅通过钢丝绳位移检测装置来控制罐笼行程的方式存在较大误差,容易导致检修人员难以快速准确的找到故障点的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种用于煤矿井筒检修的罐笼上下行程检测方法,包括:
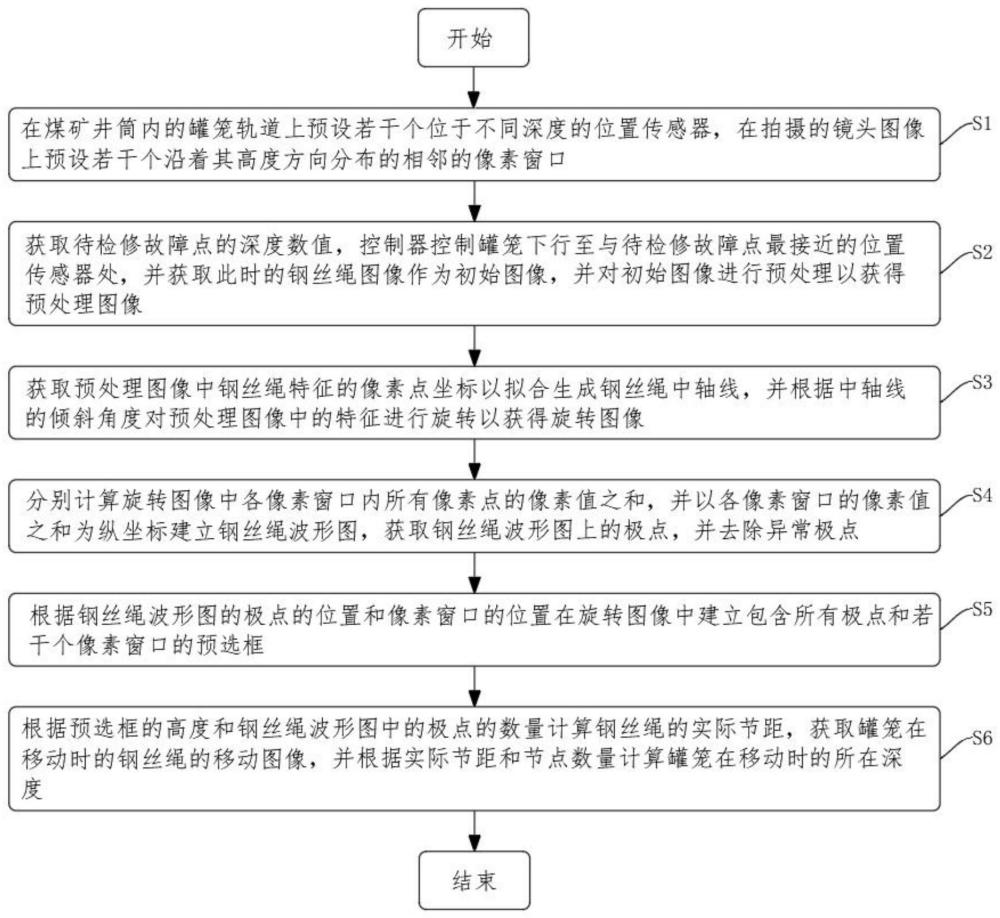
4、s1、在煤矿井筒内的罐笼轨道上预设若干个位于不同深度的位置传感器,在拍摄的镜头图像上预设若干个沿着其高度方向分布的相邻的像素窗口;
5、s2、获取待检修故障点的深度数值,控制器控制罐笼下行至与待检修故障点最接近的位置传感器处,并获取此时的钢丝绳图像作为初始图像,并对初始图像进行预处理以获得预处理图像;
6、s3、获取预处理图像中钢丝绳特征的像素点坐标以拟合生成钢丝绳中轴线,并根据中轴线的倾斜角度对预处理图像中的特征进行旋转以获得旋转图像;
7、s4、分别计算旋转图像中各像素窗口内所有像素点的像素值之和,并以各像素窗口的像素值之和为纵坐标建立钢丝绳波形图,获取钢丝绳波形图上的极点,并去除异常极点;
8、s5、根据钢丝绳波形图的极点的位置和像素窗口的位置在旋转图像中建立包含所有极点和若干个像素窗口的预选框;
9、s6、根据预选框的高度和钢丝绳波形图中的极点的数量计算钢丝绳的实际节距,获取罐笼在移动时的钢丝绳的移动图像,并根据实际节距和节点数量计算罐笼在移动时的所在深度。
10、作为优选,在步骤s1中,具体包括如下步骤:
11、s11、在在煤矿井筒内的罐笼轨道上预设若干个位于不同深度的位置传感器;
12、s12、在井筒的顶部设置用于拍摄罐笼上钢丝绳的拍摄设备;
13、s13、获取钢丝绳的捻距和股数,并计算钢丝绳的理论节距;理论节距的计算公式为:
14、
15、上式中,lz表示理论节距,n表示钢丝绳的捻距,g为钢丝绳的股数,捻距是钢丝绳在生产时的产品参数,钢丝绳的股数可以在钢丝绳上直接数得。
16、s14、根据钢丝绳的理论节距在拍摄设备的镜头上预设若干个沿着其高度方向分布的相邻的像素窗口;像素窗口的高度的计算公式为:
17、
18、上式中,h表示像素窗口的高度,lz为钢丝绳的理论节距,n为大于2的常数。
19、作为优选,在步骤s2中,具体包括如下步骤:
20、s21、获取待检修故障点的深度数值,控制器控制罐笼下行至与待检修故障点最接近的位置传感器处;
21、s22、采集此时的钢丝绳图像作为初始图像;
22、s23、对初始图像进行滤波处理和灰度转化以获取第一处理图像;
23、s24、获取第一处理图像上的各像素点的坐标和像素值;
24、s25、获取以任一像素点为中心的3×3区域内的各像素点的像素值;
25、s26、统计该3×3区域内像素值大于0的像素点数量;
26、s27、根据以各像素点为中心的3×3区域内像素值大于0的像素点数量,依次判断各像素点是否为断丝端点;
27、若3×3区域内像素值大于0的像素点数量小于或等于2,则该3×3区域的中心像素点是断丝端点,并将断丝端点的像素值改为0;
28、若3×3区域内像素值大于0的像素点数量大于2,则该3×3区域的中心像素点不是断丝端点,并进入步骤s25;
29、s28、重复步骤s25~s27,直到预处理图像上无断丝特征,以生成预处理图像。
30、作为优选,在步骤s3中,具体包括如下步骤:
31、s31、获取预处理图像中钢丝绳特征上的各像素点坐标;
32、s32、建立包含各个各像素点坐标的最大矩形框;
33、s33、以最大矩形框上下两边的中点连线作为钢丝绳的中轴线;
34、s34、计算钢丝绳中轴线与预处理图像竖直边界的倾斜角度;倾斜角度的计算公式为:
35、
36、上式中,cosθ为倾斜角度θ的余弦,a和b分别表示中轴线和预处理图像竖直边界的向量,|a|和|b|分别为向量a和b的模长;
37、s35、根据倾斜角度对钢丝绳特征进行转动,使钢丝绳中轴线与预处理图像的竖直边界平行以获得旋转图像。
38、作为优选,在步骤s4中,具体包括如下步骤:
39、s41、分别计算旋转图像中各像素窗口内所有像素点的像素值之和;
40、s42、以各像素窗口的排列顺序方向为x轴,以各像素窗口的像素值之和为y轴,建立离散点集;
41、s43、对比离散点集上各像素点的y轴坐标值,并将y轴坐标值同时大于或同时小于与其相邻的两个相邻像素点y轴坐标值的像素点标记为极点;
42、s44、计算各相邻极点的y轴坐标值的极差,并设置极差阔值去除离散点集中的异常极点,并将剩余极点依次连接以获得钢丝绳波形图。
43、作为优选,在步骤s44中,具体包括如下步骤:
44、s441、计算相邻极点之间的y轴坐标值的极差;
45、s442、根据相邻极点之间的极差设定极差阔值;极差阔值的计算公式为:
46、
47、上式中,h0表示极差阔值,τ为系数,取值为0<τ<1,yi和yi+1分别表示经过统计像素窗口的第i个和第i+1个极点的y轴坐标值,n和m表示经过统计像素窗口的第一个和最后一个极点;
48、s443、根据相邻极点之间的y轴坐标值差和极差阔值判断依次判定各极点是否是异常极点;
49、若存在|yi-yi+1|<h0且|yi-yi-1|<h0,则第i个极点为异常极点,将该异常极点的从离散点集中去除,并返回步骤s43;
50、若否,则将各个极点依次连接以获得钢丝绳波形图,并进入步骤s5;
51、上式中,h0为极差阔值,yi为t时刻钢丝绳波形图上第i个极点的y轴坐标值,yi+1和yi-1表示与其相邻的两个极点的y轴坐标值。
52、作为优选,在步骤s5中,具体包括如下步骤:
53、s51、在旋转图像中建立包含各像素窗口的最大的矩形的预选框;
54、s52、以像素窗口的高度为单位距离,使预选框的上侧框边向下依次移动,使预选框的下侧框边向上依次移动;
55、s53、使预选框的上侧框边和下侧框边之间正好包含钢丝绳波形图的左右两个最外侧的极点。
56、作为优选,在步骤s6中,具体包括如下步骤:
57、s61、根据钢丝绳波形图的极点的数量和旋转图像的缩放比计算钢丝绳的实际节距;实际节距的计算公式为:
58、
59、上式中,ls表示钢丝绳的实际节距,σ表示旋转图像与实际物体相比的缩放比,hy表示经过上下边框经过移动处理后的预选框高度,h表示像素窗口的高度,sj表示位于预选框内的钢丝绳波形图上的极点的数量;
60、s62、驱动罐笼移动,并实时获取钢丝绳的移动图像,同时同步生成移动图像的钢丝绳波形图;
61、s63、统计移动图像的钢丝绳波形图上新增的极点的数量;
62、s64、根据新增的极点的数量、实际节距和罐笼移动方向计算并输出罐笼所在深度;罐笼所在深度的计算公式为:
63、
64、其中,
65、上式中,l(t)表示在t时刻罐笼正好位于一个位置传感器处时的深度,l(t+n)表示罐笼从位置传感器处开始移动一段时间后的罐笼深度,ls表示钢丝绳的实际节距,sx表示罐笼在移动的过程中移动图像的钢丝绳波形图上新增的极点的数量,sgn(·)为符号函数,δh为通过控制钢丝绳移动的系统反馈的深度变化趋势。
66、该技术方案还提供了一种用于实现罐笼上下行程检测方法的系统,该系统包括:
67、图像获取模块,所述图像获取模块用于拍摄罐笼到达预定位置传感器后钢丝绳表面的初始图像和罐笼移动时的钢丝绳图像;
68、图像处理模块,所述图像处理模块用于对拍摄的初始图像和钢丝绳移动时的图像分别进行滤波处理、灰度转化和断丝去除以获得预处理图像和移动图像;
69、特征旋转模块,所述特征旋转模块用于获取预处理图像中钢丝绳特征的像素点坐标以建立钢丝绳中轴线,并根据钢丝绳中轴线的倾斜角度对钢丝绳特征进行相对旋转;
70、波形图建立模块,所述波形图建立模块用于在拍摄设备的图像上预先建立若干个像素窗口,并根据像素窗口内的像素值之和建立钢丝绳波形图,并去除钢丝绳波形图上的异常极点;
71、预选框建立模块,所述预选框建立模块用于在旋转图像中建立正好包含所有极点的预选框;
72、节距计算模块,所述节距计算模块用于根据预选框内钢丝绳波形图上的极点的数量和旋转图像的缩放比计算钢丝绳的实际节距;
73、行程检测模块,所述行程检测模块用于根据移动图像中钢丝绳波形图上新增的极点的数量、实际节距和罐笼移动方向计算并输出罐笼所在深度。
74、与现有技术相比,本发明提供了一种用于煤矿井筒检修的罐笼上下行程检测方法,具备以下有益效果:
75、1、本发明通过对初始图像和钢丝绳表面断丝特征的处理,以获得去除断丝后的预处理图像,通过在预处理图像上的像素窗口,利用计算像素窗口内所有像素点像素值之和的方式将钢丝绳表面的位置特征通过钢丝绳波形图的方式进行间接的显示,并通过预选框与钢丝绳波形图的方式实现对钢丝绳实际节距的间接计算,最后通过移动图像所对应的钢丝绳波形图上新增的极点的数量与钢丝绳实际节距结合对罐笼所在深度进行精确计算,实现对罐笼位置的准确检测和定位,从而方便罐笼直接到达故障点附近。
76、2、本发明通过对预处理图像中特征的各个像素点建立3×3的区域,并统计出该区域内像素值大于0的像素点数量,即可判断出该区域中心的像素点是否为一个端点,从而能够识别出断丝的端点,通过逐步的去除端点,最终实现去除断丝特征的目的。
77、3、本发明通过上建立像素窗口与旋转图像结合,借助于钢丝绳图像上边缘位置较为规律性的起伏,并进一步采用对像素窗口内所有像素点的像素值进行累加的方式,建立起钢丝绳波形图,从而能够放大钢丝绳上各截面的起伏变化,同时与预选框和旋转图像结合,实现计算钢丝绳实际节距的目的。
78、4.本发明通过设定极差阔值,对建立的钢丝绳波形图进行进一步的修正,减少其因为井筒内复杂环境而产生的局部微小突变,从而保证对极点的数量统计的准确性,以方便后续更加精准的通过节点数量计算节距和罐笼所在的深度。
- 还没有人留言评论。精彩留言会获得点赞!