一种相机参数在线标定优化方法与流程
本发明属于煤矿井下机器视觉,具体涉及一种相机参数在线标定优化方法。
背景技术:
1、视觉测量具有非接触式、不干扰被测对象自然状态等优点,被广泛应用于各个领域。利用视觉传感器采集被测目标物体的图像,通过相机成像模型将目标物体上的特征点转换为相机坐标系下的坐标,结合相机内外参数及目标物体空间位置信息可获得被测目标的运动位置和位姿参数。
2、相机作为机器视觉系统的重要组成部分,主要包括图像采集、图像处理、目标识别和处理等,采集目标图像通过图像处理后将目标信息发送到控制系统可进行后期控制与对目标进行测量。相机参数的准确性是保证机器视觉系统后期处理准确的关键,更是保证视觉测量精度的关键。
3、单目视觉测量具有测量视场范围较大、视觉传感器之间立体匹配简单等优点,但是单目视觉测量存在传感器镜头畸变造成相机参数不准确、以及在实际使用中不能实现在线标定的问题。
技术实现思路
1、本发明为了解决现有技术中存在的上述至少一个技术问题,提供了一种相机参数在线标定优化方法。
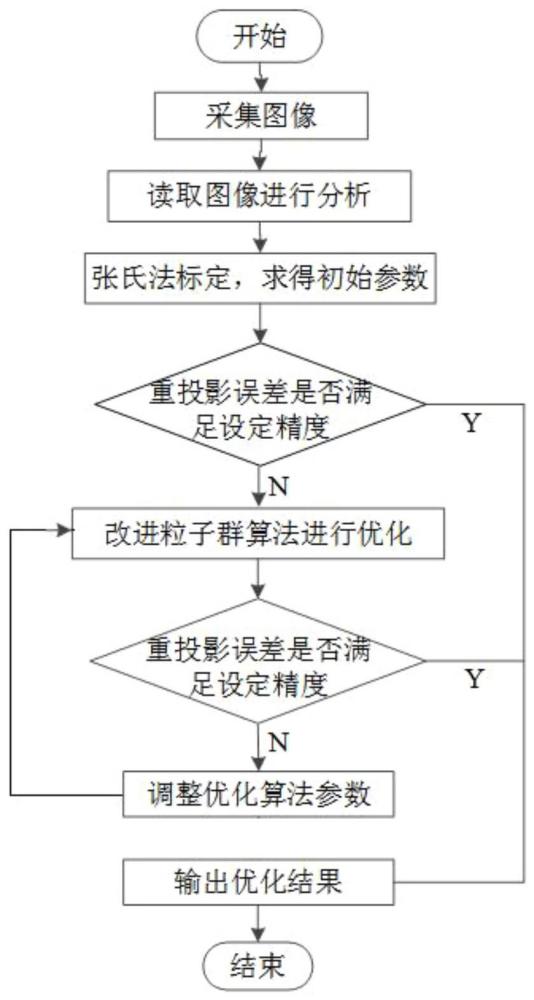
2、本发明采用如下的技术方案实现:一种相机参数在线标定优化方法,包括以下步骤:s1:通过视觉传感器对标定板图像进行采集,并对图像进行读取和分析;s2:考虑相机存在非线性畸变,将标定板图像输入相机非线性成像模型中,利用张氏法标定,求得相机初始参数;s3:根据相机的重投影误差判断相机参数标定的准确性,若满足设定精度则输出相机初始参数,否则利用粒子群算法对相机非线性成像模型进行优化;s4:在相机初始参数的基础上,利用相机非线性成像模型确定粒子群算法的适应度函数;s5:根据迭代次数对粒子群算法的惯性权重进行调节,通过动态的惯性权重对模型进行优化,求得相机优化参数;s6:根据相机的重投影误差判断相机参数标定的准确性,若满足设定精度则输出相机优化参数,否则调整粒子群算法参数直至满足设定精度后输出相机优化参数,实现参数的在线标定优化。
3、优选地,相机的重投影误差为相机非线性成像模型计算得到的像素坐标与实际像素坐标的差值,假设有n张标定图,每张有m个角点,建立目标函数为:
4、
5、式中:pij为实际通过角点检测得到的像素坐标,表示第i张图片的第j个角点,记作(ui,vi);p′ij为世界坐标系中p点通过相机非线性成像模型得到的像素坐标,记作(u′i,v′i);k为畸变系数;r为旋转矩阵;t为平移矩阵;k1为一阶径向畸变系数;k2为二阶径向畸变系数;p1为一阶切向畸变系数;p2为二阶切向畸变系数。
6、优选地,粒子群算法的适应度函数为:
7、
8、式中,u′i、v′i为通过相机非线性成像模型得到的像素坐标;ui、vi实际通过角点检测得到的像素坐标。
9、优选地,粒子群算法在迭代前期,适应度值较大,根据迭代次数对惯性权重进行调节;在迭代后期,适应度值较小,根据粒子的适应度值对惯性权重进行调节;实现惯性权重的动态调节。
10、优选地,惯性权重参数的调节公式为:
11、
12、式中,it为粒子群算法的迭代次数,itmax为最大迭代次数,wmin为惯性权重的最小值,wmax为惯性权重的最大值,fmax为种群中适应度函数最大的值,fi迭代过程中粒子的适应度函数值,favg为种群的平均适应度值。
13、优选地,改进的粒子群算法的步骤如下:t1:根据已求得的相机初始参数作为初始值,随机生成s个不同的粒子,设定初始粒子的优化范围;t2:计算每个粒子的适应度函数值,记录每个粒子的值取最小值为个体最优适应度值pbest,并记录每个粒子的位置;在种群中找出适应度值最低的粒子,此粒子的适应度值为全局最优值gbest,此位置为全局最优;t3:将种群中粒子的适应度函数值按从小到大的顺序进行排列,最大的值记为fmax,并计算粒子适应度函数的平均值,记为favg,并利用公式计算惯性权重;t4:将惯性权重代入速度和位置公式进行粒子的速度和位置更新:t5:对迭代过程中的粒子进行速度和位置判断,确保粒子在设置的范围内进行迭代,若迭代精度达到设置的条件,则停止迭代,否则转向t2继续迭代;t6:经过迭代,得到全局的最优值及所对应的位置,则为待优化函数的最优解。
14、优选地,速度和位置公式为:
15、
16、式中:r1,r2介于[0,1]之间的随机数,pi表示粒子当前的位置;pg表示粒子群中粒子的最优位置;c1、c2为学习因子;vi(t)为t时刻粒子的速度;xi(t)为t时刻粒子的位置。
17、优选地,粒子群算法迭代停止的条件设置为:
18、|(fitness(it)-fitness(it-100))/fitness(it)|<0.02
19、式中:fitness(it)为当前迭代粒子的适应度函数值,fitness(it-100)为当前迭代前100次粒子的适应度函数值。
20、与现有技术相比,本发明的有益效果是:
21、本发明通过煤机装备装配的视觉传感器对标定板图像进行采集,在张氏标定法及改进粒子群优化算法的基础上,对相机内外参数进行在线标定及优化,从而实现对相机实时在线标定,解决在煤矿井下相机难以准确标定的问题,同时也可提高相机标定结果的准确性,对煤矿井下图像采集、视觉测量具有重要意义。
技术特征:
1.一种相机参数在线标定优化方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种相机参数在线标定优化方法,其特征在于:相机的重投影误差为相机非线性成像模型计算得到的像素坐标与实际像素坐标的差值,假设有n张标定图,每张有m个角点,建立目标函数为:
3.根据权利要求2所述的一种相机参数在线标定优化方法,其特征在于:粒子群算法的适应度函数为:
4.根据权利要求3所述的一种相机参数在线标定优化方法,其特征在于:粒子群算法在迭代前期,适应度值较大,根据迭代次数对惯性权重进行调节;在迭代后期,适应度值较小,根据粒子的适应度值对惯性权重进行调节;实现惯性权重的动态调节。
5.根据权利要求4所述的一种相机参数在线标定优化方法,其特征在于:惯性权重参数的调节公式为:
6.根据权利要求5所述的一种相机参数在线标定优化方法,其特征在于:改进的粒子群算法的步骤如下:
7.根据权利要求6所述的一种相机参数在线标定优化方法,其特征在于:速度和位置公式为:
8.根据权利要求6所述的一种相机参数在线标定优化方法,其特征在于:粒子群算法迭代停止的条件设置为:
技术总结
本发明属于煤矿井下机器视觉技术领域,解决了单目视觉测量存在传感器镜头畸变造成相机参数不准确、以及在实际使用中不能实现在线标定的问题。提供了一种相机参数在线标定优化方法,通过视觉传感器对标定板图像进行采集,并对图像进行读取和分析;考虑相机存在非线性畸变,将标定板图像输入相机非线性成像模型中,利用张氏法标定,求得相机初始参数;根据相机的重投影误差判断相机参数标定的准确性,利用粒子群算法对相机非线性成像模型进行优化,求得相机优化参数,实现参数的在线标定优化。本发明能够解决在煤矿井下相机难以准确标定的问题,同时也可提高相机标定结果的准确性,对煤矿井下图像采集、视觉测量具有重要意义。
技术研发人员:乔佳伟,贾运红,鲍文亮,高旭彬,曹建文,许连丙,姜铭,田克君,龙先江,王健,郭利强,冯化
受保护的技术使用者:中国煤炭科工集团太原研究院有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!