一种基于隐式形状模型的相似度计算方法、系统及介质与流程
本发明涉及三维模型相似度计算,更具体的说是涉及一种基于隐式形状模型的零件三维模型相似度计算方法、系统及介质。
背景技术:
1、零件的三维模型包含了精确的的几何设计信息,这些信息是零件制造的重要依据。然而,零件的三维模型通过b-rep模型(点、线、面、环)表示几何拓扑结构,这些拓扑结构难以量化,使得难以量化比较零件三维模型差异性。
2、在获取零件三维模型视图过程中,不同视角的选择影响到了视图对三维模型形状的准确表达,零件模型由三维降低到二维丢失大量关键细节信息。零件三维模型中存在大量加工特征,这些局部特征影响了零件制造以及功能,仅仅依靠模型的外形差异无法进一步准确地区分零件三维模型。所以图像相似性分析方法难以精确求解零件三维模型的相似度。
3、因此,如何提高零件三维模型相似度的计算精度是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种基于隐式形状模型的相似度计算方法、系统及介质,用于提高零件三维模型相似度的计算精度。
2、为了实现上述目的,本发明采用如下技术方案:
3、本发明首先公开了一种基于隐式形状模型的零件三维模型相似度计算方法,包括以下步骤:
4、目标特征描述表建立步骤:
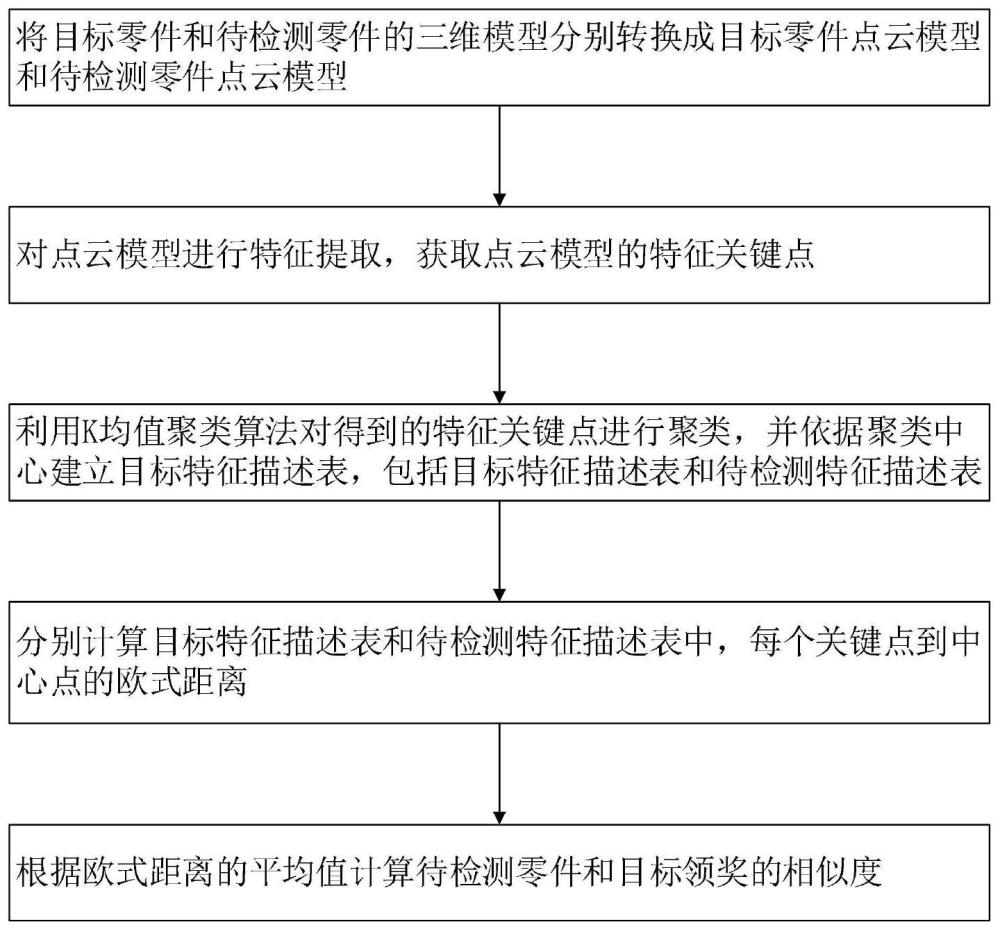
5、将目标零件的三维模型转换成目标零件点云模型;
6、对所述目标零件点云模型进行特征提取,获取目标零件点云模型的特征关键点;
7、利用k均值聚类算法对得到的特征关键点进行聚类,并依据聚类中心建立目标特征描述表;
8、待检测特征描述表建立步骤:
9、将待检测零件的三维模型转换成待检测零件点云模型;
10、对所述待检测零件点云模型进行特征提取,获取待检测零件点云模型的特征关键点;
11、利用k均值聚类算法对得到的特征关键点进行聚类,并依据聚类中心建立待检测特征描述表;
12、相似度计算步骤:
13、依据目标特征描述表,计算目标零件点云模型的每个特征关键点到中心点的欧式距离;
14、依据待检测特征描述表,计算待检测零件点云模型的每个特征关键点到中心点的欧式距离;
15、根据待检测零件点云模型中欧式距离的平均值和目标零件点云模型中欧式距离的平均值计算待检测零件和目标零件的相似度。
16、进一步地,将目标零件的三维模型转换成目标零件点云模型,具体包括:
17、利用八叉树结构模型对目标零件的三维模型进行空间细分,生成零件模型空间单元体;
18、沿八叉树结构模型的x、y、z坐标轴正负方向,对每一方向上的八叉树结构模型单元体进行逐行扫描;
19、判断每行八叉树模型单元体的模型空间是否被所述零件模型空间单元体遮挡,若所述模型空间被遮挡,则计算所述模型空间的中心点坐标,将所述中心点坐标作为目标零件点云模型的坐标点坐标。
20、进一步地,对所述目标零件点云模型进行特征提取,获取目标零件点云模型的关键点特征,具体包括:
21、以目标零件点云模型中每个点为坐标原点构建局部坐标系,获取每个点的表面法线n;
22、选择半径r内的所有近邻点并根据每个点的表面法线n计算其点特征直方图特征三要素α、φ、θ;
23、将每个点的点特征直方图特征三要素α、φ、θ,以及与近邻点的欧式距离d作为目标零件点云模型的关键点特征。
24、进一步地,所述点特征直方图通过以下步骤得到:
25、将每个点的点特征直方图特征三要素α、φ、θ,以及与近邻点的欧式距离d分成若干个等宽的区间,将每个区间内的数据数量或频率绘制到直方图上,生成点特征直方图。
26、进一步地,利用k均值聚类算法对得到的关键点进行聚类,并依据聚类中心建立目标特征描述表,具体包括:
27、计算目标零件点云模型中每个点相对模型质心的方向;
28、计算每个聚类相对中心方向的统计权重,所述统计权重用于对所述目标零件点云模型的局部特征进行描述。
29、另一方面本发明公开了一种基于隐式形状模型的相似度计算系统,包括,
30、点云模型生成模块:用于将目标零件的三维模型转换成目标零件点云模型;将待检测零件的三维模型转换成待检测零件点云模型;
31、点云特征提取模块:用于对目标零件点云模型进行特征提取,获取目标零件点云模型的关键点特征;对待检测零件点云模型进行特征提取,获取待检测零件点云模型的关键点特征;
32、k均值聚类模块:用于利用k均值聚类算法对得到的关键点特征进行聚类,并依据聚类中心建立特征描述表,所述特征描述表包括目标特征描述表和待检测特征描述表;
33、相似度检测模块:用于计算目标特征描述表中每个特征关键点到中心点的欧式距离;计算计算待检测零件点云模型的每个特征关键点到中心点的欧式距离;并根据待检测零件点云模型中欧式距离的平均值和目标零件点云模型中欧式距离的平均值计算待检测零件和目标零件的相似度。
34、进一步地,所述点云模型生成模块中,将目标零件的三维模型转换成目标零件点云模型,具体包括以下步骤:
35、利用八叉树结构模型对目标零件的三维模型进行空间细分,生成零件模型空间单元体;
36、沿八叉树结构模型的x、y、z坐标轴正负方向,对每一方向上的八叉树结构模型单元体进行逐行扫描;
37、判断每行八叉树模型单元体的模型空间是否被所述零件模型空间单元体遮挡,若所述模型空间被遮挡,则计算所述模型空间的中心点坐标,将所述中心点坐标作为目标零件点云模型的坐标点坐标。
38、进一步地,所述点特征提取模块中,获取目标零件点云模型的关键点特征,具体包括以下步骤:
39、以目标零件点云模型中每个点为坐标原点构建局部坐标系,获取每个点的表面法线n;
40、选择半径r内的所有近邻点并根据每个点的表面法线n计算其pfh特征三要素α、φ、θ;
41、将每个点的pfh特征三要素α、φ、θ,以及与近邻点的欧式距离d作为目标零件点云模型的关键点特征。
42、进一步地,所述k均值聚类模块中,建立目标特征描述表,具体包括以下步骤:
43、计算目标零件点云模型中每个点相对模型质心的方向;
44、计算每个聚类相对中心方向的统计权重,所述统计权重用于对所述目标零件点云模型的局部特征进行描述。
45、此外本发明还公开了一种基于隐式形状模型的相似度计算介质,包括计算机程序,所述计算机程序用于实现本发明任意一项所述的基于隐式形状模型的相似度计算方法。
46、经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种基于隐式形状模型的相似度计算方法、系统及介质,具有以下有益效果:
47、本发明将零件模型转换为点云模型,在不进行任何离散化的情况下保留了三维空间中原始的几何信息,并通过隐式形状模型计算相似度,提高了零件三维模型相似度的计算精度。
- 还没有人留言评论。精彩留言会获得点赞!