一种基于博弈论的无人艇集群指定时间位置决策方法与装置
本发明涉及无人艇集群博弈对抗,尤其是一种基于博弈论的无人艇集群指定时间位置决策方法与装置。
背景技术:
1、博弈论是研究具有斗争或竞争性质现象的理论方法。将博弈论应用于无人艇集群对抗能够有效刻画作战方之间的竞争和决策演化。在博弈论中,如果每个参与者都采取了最优的策略,且任何一方单独改变自身策略都无法获得更高收益,那么当前所有参与者的策略组合即为纳什均衡。在纳什均衡下,各方的策略组合形成了一种稳定状态。在无人艇集群对抗博弈中,分析纳什均衡可以优化位置决策,不仅可以增强我方无人艇的攻击力,还能够降低敌方无人艇的威胁。
2、为加快纳什均衡求解算法的收敛速度,关于有限时间与固定时间收敛下的纳什均衡求解算法已经取得了很多不错的成果。然而,这些求解方法的收敛时间受初始状态与系统参数的影响并且无法提前预测,在一定程度上限制了求解方法的实际适用性。为了解决上述问题,近年来提出的指定时间分布式博弈算法是一个有效的手段。
3、尽管目前已有一些关于指定时间收敛下纳什均衡求解的研究成果,但将其应用于无人艇集群对抗博弈的文献相对较少,尤其是无人艇集群的位置决策方面。面对复杂多变的现代化战场,即时高效的协同决策与对抗是把握战机、赢得战争主动权的重要因素。因此,把指定时间收敛下的纳什均衡求解算法应用到无人艇集群的位置决策兼具理论意义与战略意义。
技术实现思路
1、本发明所要解决的技术问题在于,提供一种基于博弈论的无人艇集群指定时间位置决策方法与装置,通过结合tbg函数、一致性协议与梯度方法,设计指定时间收敛下的分布式非合作博弈算法,快速、有效地解决无人艇集群寻求最优对抗位置问题,提高决策的效率。
2、为解决上述技术问题,本发明提供一种基于博弈论的无人艇集群指定时间位置决策方法,包括如下步骤:
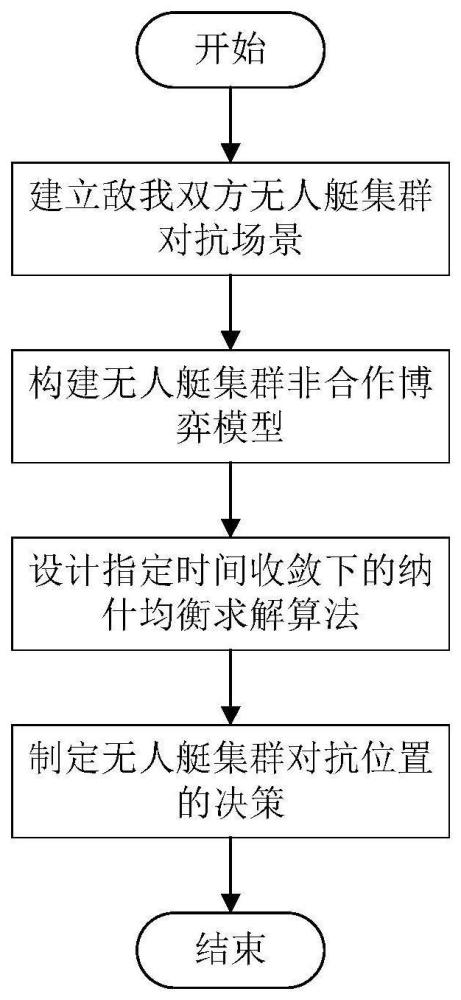
3、步骤1、建立敌我双方无人艇集群对抗场景,并随机生成无人艇集群的初始位置;
4、步骤2、基于无人艇集群的初始位置、通信距离、无人艇携带武器的最大射程与安全射程,将求解我方无人艇集群的最优对抗位置问题建模为非合作博弈问题;
5、步骤3、基于tbg函数、一致性协议与梯度方法,设计指定时间收敛下的分布式纳什均衡求解算法;
6、步骤4、制定我方无人艇集群的位置决策。
7、优选的,步骤1中,建立敌我双方无人艇集群对抗场景具体为:建立敌我双方无人艇集群作战区域q,假设双方所在的海域存在一条作战线,双方均不能越过该作战线进入对方作战领域;我方无人艇集群集合记为无人艇ai的位置为其初始位置由表示,其中,na表示我方无人艇集群数量,a代表我方无人艇集群;表示我方第i艘无人艇的横坐标值,表示我方第i艘无人艇的纵坐标值;敌方无人艇集群集合可记为定义敌方无人艇bj的位置为其初始位置可由表示,其中,nb表示敌方无人艇集群数量,b代表敌方无人艇集群;表示敌方第j艘无人艇的横坐标值,表示敌方第j艘无人艇的纵坐标值。
8、优选的,步骤2中,基于无人艇集群的初始位置、通信距离、无人艇携带武器的最大射程与安全射程,将求解我方无人艇集群的最优对抗位置问题建模为非合作博弈问题具体包括如下步骤:
9、步骤21、建立我方第i艘无人艇击毁敌方无人艇的能力f1,i;
10、步骤22、建立我方第i艘无人艇防御敌方无人艇攻击的能力f2,i;
11、步骤23、构建我方第i艘无人艇的目标函数fi。
12、优选的,步骤21中,根据敌我双方无人艇的初始位置、无人艇携带武器的最大射程dmax与安全射程dmin,定义f1,i为:
13、
14、其中,i=1,…,na,j=1,…,nb,na和nb分别是我方和敌方无人艇的数量;为我方无人艇ai的位置,为敌方无人艇bj的位置;为我方无人艇ai击毁敌方无人艇bj的概率,其具体形式为:
15、
16、其中,dij为我方无人艇ai和敌方无人艇bj之间的距离,当函数f1,i数值越小时,即我方无人艇ai与敌方无人艇bj之间的距离越接近于dmin时,我方第i艘无人艇击毁敌方无人艇的能力越强。
17、优选的,步骤22中,提高无人艇集群协作能力与防御能力,f2,i定义为:
18、
19、其中,i=1,…,na,为我方第i艘无人艇的位置;di,i-1和di,i+1分别表示无人艇ai与无人艇ai-1以及无人艇ai+1的最佳协作距离;为保证每一艘无人艇至少能与两艘无人艇保持有效通信,协作完成复杂作战任务,当有特殊情况即i=1时,设定i-1=na,以及i=na时,设定i+1=1;当函数f2,i数值越小时,即我方无人艇ai分别与其它两艘无人艇ai-1和ai+1之间的距离越接近于最佳协作距离di,i-1和di,i+1时,我方第i艘无人艇的防御能力越强。
20、优选的,步骤23中,基于上述我方第i艘无人艇击毁敌方无人艇的能力f1,i和防御敌方无人艇攻击的能力f2,i,目标函数fi可建立为:
21、fi=α1f1,i+α2f2,i,α1+α2=1
22、其中,i=1,…,na,α1≥0和α2≥0分别为我方无人艇集群对击毁能力和防御能力的重视权重。
23、优选的,步骤3中,基于tbg函数、一致性协议与梯度方法,设计指定时间收敛下的分布式纳什均衡求解算法具体包括如下步骤:
24、步骤31、定义tbg函数;一个连续可微时变函数ξ(t)称为tbg函数,需满足下列条件:
25、
26、且其关于时间变量t的导数满足:
27、
28、其中,tf为任意给定的收敛时间,不依赖于任何初始状态,可根据实际工程需要进行设定;
29、步骤32、无人艇ai更新自身策略
30、步骤33、更新无人艇ai对aj的决策估计yij。
31、优选的,步骤32中,为增强击毁与防御能力,每艘无人艇都根据局部信息调整自身策略,以使目标函数值最小,其基于梯度方法的策略更新式为:
32、
33、其中,时变函数为关于tbg的函数;k1,i>0是控制增益;是无人艇ai对除自身外其它所有无人艇决策的估计值。
34、优选的,步骤33中,由于每个无人艇仅能获得其邻居的决策信息,无法获取非邻居无人艇的决策,因此,每个无人艇通过与邻居之间的信息交互来更新其他无人艇的决策估计值,以使得估计值收敛到真实值,基于一致性协议,估计值yij的具体更新式为:
35、
36、其中,ωij表示无人艇之间的通信关系,如果无人艇ai和无人艇aj可以进行信息交互,则ωij=1,否则ωij=0。
37、相应的,一种基于博弈论的无人艇集群指定时间位置决策装置,包括:场景构建模块、模型建立模块以及位置决策模块;所述场景构建模块,用于创建和模拟无人艇集群对抗的环境,设置敌我双方的作战区域、无人艇集群的数量与初始位置、携带武器的最大射程与安全射程等关键信息,便于模拟和分析各种作战情况;所述模型建立模块,用于后续指定时间位置决策算法的设计,基于无人艇集群的初始位置、通信距离等信息,将求解我方无人艇集群的最优对抗位置问题建模为非合作博弈问题;所述位置决策模块,用于在无人艇集群对抗中快速地确定我方每艘无人艇的最佳位置,,以增强我方无人艇的攻击与防御能力,确保实时响应战场态势的变化。
38、本发明的有益效果为:本发明通过将无人艇集群寻求最优对抗位置问题转化为非合作博弈问题,构建水面无人艇集群博弈模型,并设计指定时间下的分布式纳什均衡求解算法;该方法能够在任意指定的时间内求解非合作博弈问题的纳什均衡,快速解决无人艇集群寻求最优对抗位置问题,增强我方无人艇的攻击与防御能力,提高决策的效率;此外,采用的tbg函数可使初始时变增益项为零,避免了输入量在初始时过大的问题,由于时变增益θ(t)的设计和计算较为简单,因此本发明在结构上较为简便,易于实施。
- 还没有人留言评论。精彩留言会获得点赞!