一种基于动态对抗网络的行星齿轮箱故障诊断方法与流程
本发明属于行星齿轮箱故障诊断方法应用领域,具体涉及一种基于动态对抗网络的行星齿轮箱故障诊断方法。
背景技术:
1、作为直升机传动系统中的关键动部件,行星轮系的正常运行是直升机安全飞行的重要保证。由于行星轮系的结构以及独特的运动形式给传动系统的特征提取、故障诊断等带来很大的挑战。
2、随着直升机监测数据量的快速增长,基于深度学习的齿轮智能故障诊断成为一种主流趋势,但深度学习方法对故障数据量有较高的要求,而直升机健康监测系统保存的历史监测数据,数据样本单一,故障样本少,很难满足深度学习网络的要求。
3、许多学者采用深度迁移学习方法解决标注故障数据不足的问题,其主要方法有域适配模型和域对抗模型两种。现有大多域对抗方法集中在全域模型,没有考虑到子域分布差异;同时现有方法通常假设边缘分布和条件分布对域差异具有相同的重要性,但在工程实际中这个假设并不成立。
技术实现思路
1、本发明的发明目的在于提供一种基于动态对抗网络的行星齿轮箱故障诊断方法,解决上述行星轮系标注故障数据不足,取得了更佳的分布对齐准确率,提高了故障识别率。
2、本发明的发明目的通过以下技术方案实现:
3、一种基于动态对抗网络的行星齿轮箱故障诊断方法,包括以下步骤:
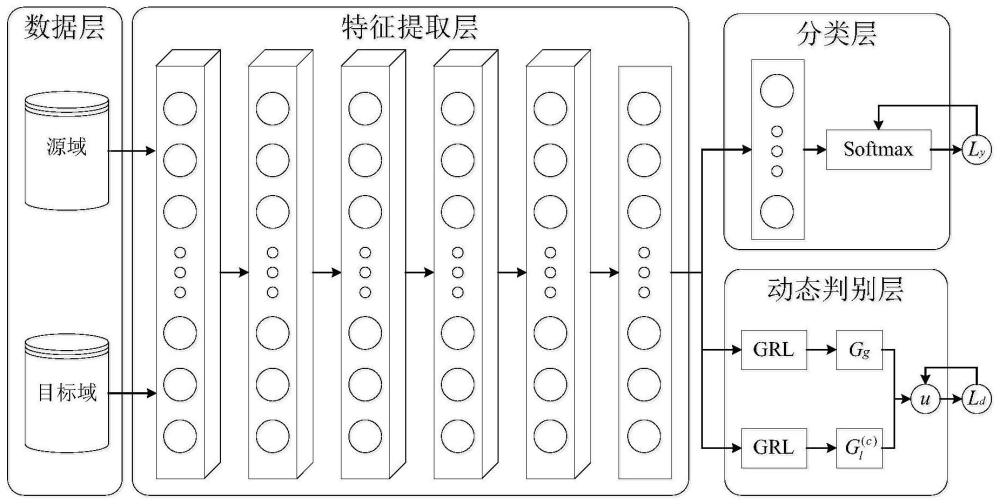
4、步骤1,特征提取网络包含特征提取层和分类层,将行星齿轮箱振动信号中带标签的源域、无标签的目标域分别输入到特征提取层进行训练,提取源域的可迁移故障特征、目标域的可迁移故障特征,再将可迁移故障特征输入到分类层进行故障分类;
5、步骤2,域判别器gd包含全域判别器和子域判别器,采用全域判别器对源域和目标域的可迁移故障特征的边缘分布进行自适应对齐,采用子域判别器对源域和目标域的条件分布进行自适应对齐。
6、较佳地,特征提取网络共有7层,其中5个卷积层和1个全连接层组成特征提取层,卷积层和全连接层的激活函数为relu函数,1个输出层组成分类层,输出层的激活函数为softmax函数。
7、较佳地,特征提取层gf的网络参数θf通过最大化gd的损失来学习,而gd的参数θd通过最小化gd的损失来训练;此外,分类层gy的损失也被最小化;
8、全域判别器的损失为:
9、
10、式中,lg表示全域判别器损失;ds、dt分别表示源域、目标域的样本,ld表示域判别器损失,由全域判别器损失lg与子域判别器损失ll综合得到;di表示样本的域标签,源域的di为0,目标域的di为1;ns、nt分别表示源域、目标域的样本数;gg表示全域判别器;
11、子域判别器的损失为:
12、
13、式中,ll表示子域判别器损失;表示样本xi在类别c上的预测概率分布;
14、分类层的损失为:
15、
16、式中,m表示样本数;pz表示softmax函数预测概率分布;yz表示样本xz对应的标签。
17、较佳地,还包含步骤3,定义动态对抗因子作为全域判别器和子域判别器的权重指标。
18、较佳地,动态对抗因子u为:
19、
20、式中,dg表示由全域判别器得到的源域到目标域的a-距离,表示由子域判别器得到的类别c的样本从源域到目标域中的a-距离:
21、dg=dgg(ds,dt)=2(1-2(lg))
22、
23、式中,ds、dt分别表示源域、目标域的样本;分别表示源域、目标域中类别c的样本;lg表示全域判别器损失;表示子域判别器在类别c的损失;
24、动态对抗因子初始化为1,其在每次迭代阶段后都进行计算;最终,当训练收敛时,动态对抗网络将学习到一个相当鲁棒的动态对抗因子。
25、较佳地,包含步骤4,对由源域与目标域的分类损失、全域判别器损失与子域判别器损失及动态对抗因子组成的目标函数进行迭代训练,直到目标函数值达到阈值,并利用完成训练的模型识别目标域的健康状态;其中:
26、特征提取网络的优化目标为最小化分类损失,即为:
27、
28、式中,θf表示特征提取层的参数;θy表示分类层的参数,xz表示源域与目标域中的样本;
29、全域判别器和子域判别器的优化目标为最小化全域判别器损失和子域判别器损失,即为:
30、
31、式中,α表示全域判别器损失的权重;
32、由全域判别器、子域判别器、动态对抗因子组成的动态判别层的优化目标为:
33、
34、由源域与目标域的分类损失、动态判别层组成的目标函数定义如下:
35、
36、式中,λ表示平衡系数,λ>0。
37、本发明的有益效果在于:
38、本发明提出的一种基于动态对抗网络的行星齿轮箱故障诊断方法,采用全域判别器、子域判别器对故障特征的分布进行自适应对齐;同时采用权重指标评估全域判别器与子域判别器的相对权重。本发明解决了实际工业中故障数据不足导致直升机行星轮系故障诊断率低的问题,通过动态对抗因子评估边缘分布和条件分布的相对重要性提高了分布对齐的准确度,全域判别器和子域判别器对齐数据的边缘分布和条件分布提高了故障识别率。
技术特征:
1.一种基于动态对抗网络的行星齿轮箱故障诊断方法,其特征在于包括以下步骤:
2.根据权利要求1所述的一种基于动态对抗网络的行星齿轮箱故障诊断方法,其特征在于特征提取网络共有7层,其中5个卷积层和1个全连接层组成特征提取层,卷积层和全连接层的激活函数为relu函数,1个输出层组成分类层,输出层的激活函数为softmax函数。
3.根据权利要求1所述的一种基于动态对抗网络的行星齿轮箱故障诊断方法,其特征在于特征提取层gf的网络参数θf通过最大化gd的损失来学习,而gd的参数θd通过最小化gd的损失来训练;此外,分类层gy的损失也被最小化;
4.根据权利要求1所述的一种基于动态对抗网络的行星齿轮箱故障诊断方法,其特征在于还包含步骤3,定义动态对抗因子作为全域判别器和子域判别器的权重指标。
5.根据权利要求4所述的一种基于动态对抗网络的行星齿轮箱故障诊断方法,其特征在于动态对抗因子u为:
6.根据权利要求1所述的一种基于动态对抗网络的行星齿轮箱故障诊断方法,其特征在于还包含步骤4,对由源域与目标域的分类损失、全域判别器损失与子域判别器损失及动态对抗因子组成的目标函数进行迭代训练,直到目标函数值达到阈值,并利用完成训练的模型识别目标域的健康状态;其中:
技术总结
本发明公开了一种基于动态对抗网络的行星齿轮箱故障诊断方法,特征提取网络包含特征提取层和分类层,将行星齿轮箱振动信号中带标签的源域、无标签的目标域分别输入到特征提取层进行训练,提取源域的可迁移故障特征、目标域的可迁移故障特征,再将可迁移故障特征输入到分类层进行故障分类;域判别器包含全域判别器和子域判别器,采用全域判别器对源域和目标域的可迁移故障特征的边缘分布进行自适应对齐,采用子域判别器对源域和目标域的条件分布进行自适应对齐。本发明通过全域判别器和子域判别器对齐数据的边缘分布和条件分布提高了故障识别率。
技术研发人员:揭震国,曹亮,张尚田,黄玉婧,徐智,郭培培,许冲,单添敏,王景霖,沈勇
受保护的技术使用者:中国航空工业集团公司上海航空测控技术研究所
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!