一种基于铲运机的动态称重方法及系统
本发明涉及铲运机领域,尤其涉及一种基于铲运机的动态称重方法及系统。
背景技术:
1、如图2所示,图2为现有技术的电动铲运机的常见结构,一般包括前车架、翻斗油缸、摇臂、铲斗连杆、动臂、两个举升油缸组成。铲运机是矿山无轨设备的一种,广泛应用于地下矿山的采掘、运输。以铲运机和自卸式运矿卡车为核心的无轨采矿设备 ,在国内外已成为采矿技术发展的主流。目前,市场上广泛应用的铲运机分为内燃铲运机与电动铲运机两种,内燃铲运机适用于通风良好的作业环境,拥有灵活、高效的特点;电动铲运机则更加环保,无污染。
2、现有技术对于铲运机称重,仅是搭建了针对测量方式和信号输送及处理的静态或动态称重系统,但是没有考虑在测重过程中,中心点产生的角度偏移和重心偏移等问题。
3、综上,现行方法存在如下问题:
4、1. 无法动态得到铲运机的称重结果;
5、2. 当前操作环境对铲运机的称重结果有影响,现有技术未考虑此类因素;
6、3. 在矿山工作环境中较难应用,特别是地下铲运机铲装矿石的情况下,称重计算数据处理方式不准确。
技术实现思路
1、为解决上述问题,本发明提供了一种基于铲运机的动态称重方法及系统,通过简化装置、建立模型、修正参数进行实时物料的质量检测,具体包括:
2、一种基于铲运机的动态称重方法,包括下述步骤:
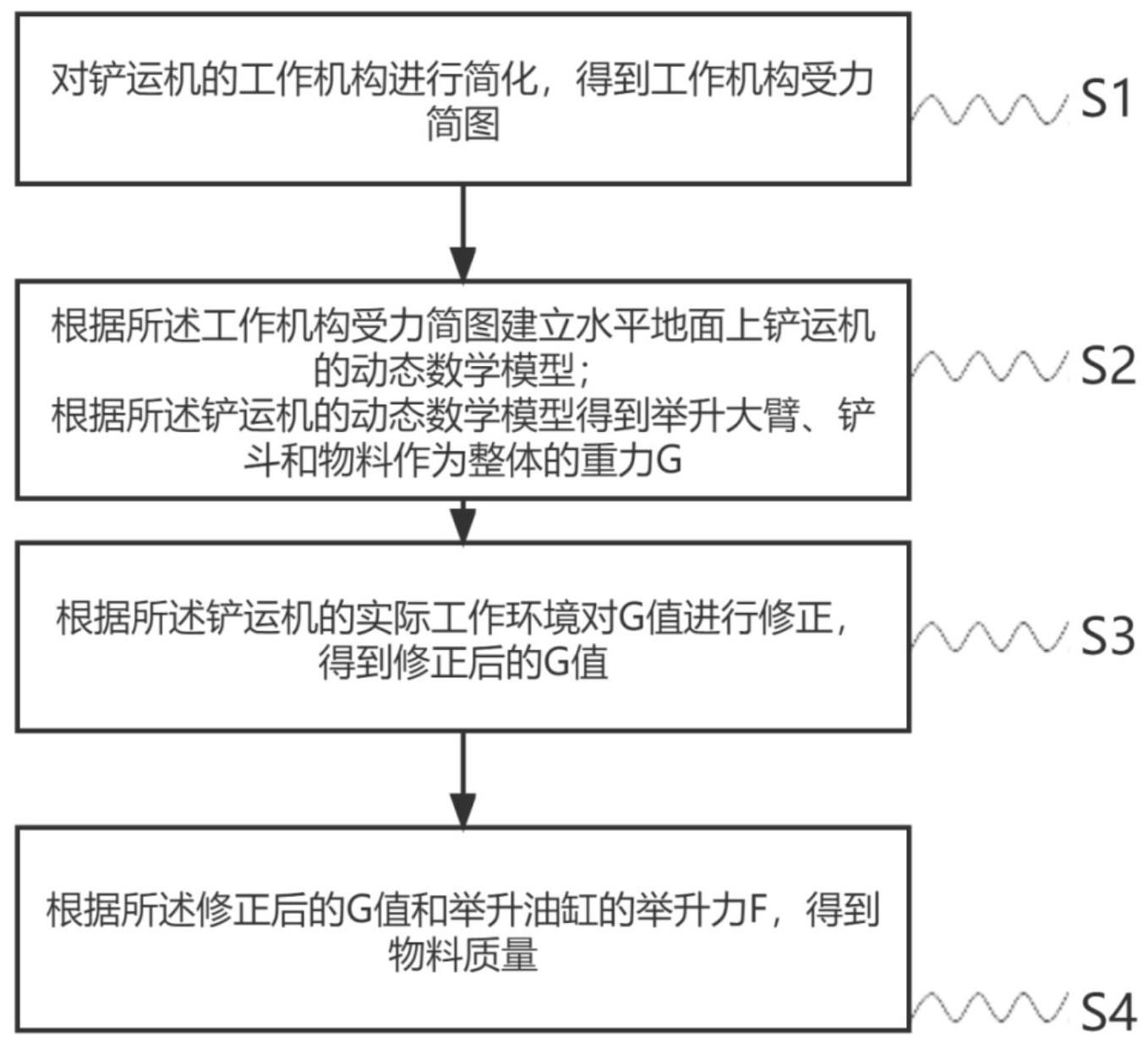
3、s1、对铲运机的工作机构进行简化,得到工作机构受力简图;
4、s2、根据所述工作机构受力简图在水平地面上建立铲运机的动态数学模型;根据所述铲运机的动态数学模型得到举升大臂、铲斗和物料作为整体的重力g;
5、s3、根据所述铲运机的实际工作环境对所述举升大臂、铲斗和物料作为整体的重力g的数值进行修正,得到修正后的g值;
6、s4、根据所述修正后的g值和举升油缸的举升力f,得到物料质量。
7、优选的,所述s1的对铲运机的工作机构进行简化,得到工作机构受力简图包括:
8、设置举升大臂与机体连接的旋转点为o1;
9、设置举升油缸与机体连接的旋转点为o2;
10、设置举升油缸与举升大臂连接的旋转点为o3;
11、设置目标重心到举升大臂与o1距离为l1,其中,所述目标重心为所述举升大臂、所述铲斗和所述物料作为整体的重心;
12、设置o1到线段o2 o3的距离为l2。
13、优选的,所述s2的根据所述工作机构受力简图建立水平地面上铲运机的动态数学模型;根据所述铲运机的动态数学模型得到举升大臂、铲斗和物料作为整体的重力g包括:
14、s201、根据所述铲运机的动态数学模型,建立刚体绕定轴的转动微分方程,所述刚体绕定轴的转动微分方程为公式1:
15、(1)
16、其中,j为所述举升大臂、铲斗和物料作为整体,绕点o1的转动惯量;
17、ε为所述举升大臂、铲斗和物料作为整体,绕点o1的角加速度;
18、f为举升油缸的举升力;
19、g为所述举升大臂、铲斗和物料作为整体的重力;
20、为所述举升大臂绕铰接点o1的力矩代数和;
21、θ为o1g的连线与竖直方向的夹角
22、s202、根据刚体绕定轴的转动微分方程得到g的表达式,所述g的表达式为公式2:
23、(2)
24、其中,θ为o1g的连线与竖直方向的夹角,o1g为o1点与所述举升大臂、铲斗和物料作为整体的中心点的连线,∠o3 o1 o2=θ+θ0,θ0为θ的常量差值;
25、其中,|o1 o2|为线段o1 o2的长度;|o1 o3|为线段的o1 o3长度;|o2 o3|为线段o2 o3的长度。
26、优选的,所述s3的根据所述铲运机的实际工作环境对g值进行修正,得到修正后的g值包括:
27、s301、对θ角进行纵向倾斜修正和横向倾斜修正,得到角度修正后的g值;
28、s302、对所述角度修正后的g值进行重心偏移修正,得到修正后的g值。
29、优选的,所述s301的对θ角进行纵向倾斜修正和横向倾斜修正,得到角度修正后的g值包括:
30、所述纵向倾斜修正包括:采用绝对水平角度传感器测量计算θ角;
31、所述横向倾斜修正包括:设置所述铲运机横向摆动角度为γ,以纵向视角对所述举升大臂和物料进行分析;
32、所述角度修正后的g值计算公式为公式3:
33、(3)。
34、优选的,所述s302的对所述角度修正后的g值进行重心偏移修正,得到修正后的g值的计算公式为公式4:
35、(4)
36、其中,l1为o1g的距离,随所述物料位置变化而变化;
37、fd1为转斗油缸压缩面端承受的压力;
38、fd2为转斗油缸连接面端承受的压力;
39、c1为物料在转斗油缸压缩面端的质心偏移的参数;
40、c2为物料在转斗油缸连接面端的质心偏移的参数。
41、优选的,所述s4的根据所述修正后的g值和举升油缸的举升力f,得到物料质量包括:
42、s401、根据受力平衡方程,得到所述举升油缸的举升力f,f的计算公式为公式5:
43、(5)
44、其中,p1为所述举升油缸的进油口压力;
45、p2为所述举升油缸的出油口压力;
46、s1为所述举升油缸的油缸进口方向的有效截面面积;
47、s2为所述举升油缸的油缸出口方向的有效截面面积;
48、m为所述举升油缸的油缸伸出杆的质量;
49、a为地球引力常数;
50、为举升油缸的油缸进口压力损失值;
51、为举升油缸的油缸出口压力损失值。
52、s402、通过所述修正后的g值和所述举升油缸的举升力f得到物料质量。
53、优选的,所述s402的通过所述修正后的g值和所述举升油缸的举升力f得到物料质量包括:
54、根据所述修正后的g值和所述举升油缸的举升力f计算所述举升大臂、所述铲斗和所述物料质量之和mz,所述mz的计算公式包括公式6:
55、(6)
56、其中,
57、;
58、;
59、;
60、;
61、根据所述举升大臂、所述铲斗和所述物料质量之和mz,得到物料质量mw,所述mw的计算公式为公式(7):
62、(7)
63、其中,my为所述举升大臂和所述铲斗质量之和。
64、一种基于铲运机的动态称重系统,包括:
65、简化模块,用于对铲运机的工作机构进行简化,得到工作机构受力简图;
66、模型建立模块,用于根据所述工作机构受力简图建立水平地面上铲运机的动态数学模型;根据所述铲运机的动态数学模型得到举升大臂、铲斗和物料作为整体的重力g;
67、修正模块,用于根据所述铲运机的实际工作环境对g值进行修正,得到修正后的g值;
68、计算模块,根据所述修正后的g值和举升油缸的举升力f,得到物料质量。
69、优选的,所述简化模块的简化规则包括:
70、设置举升大臂与机体连接的旋转点为o1;
71、设置举升油缸与机体连接的旋转点为o2;
72、设置举升油缸与举升大臂连接的旋转点为o3;
73、设置目标重心到举升大臂与o1距离为l1,其中,所述目标重心为所述举升大臂、所述铲斗和所述物料作为整体的重心;
74、设置o1到| o2 o3|的距离为l2,其中,| o2 o3|为点o2和点o3的连线。
75、上述技术方案,与现有技术相比至少具有如下有益效果:
76、上述方案,本方法可实现准确的检测物料的质量,对角度和重心分别进行修正,可以准确的得到物料的质量。在矿山工作环境中较难应用,特别是地下铲运机铲装矿石的情况下,修正重心偏移极为重要,本方法通过简化结构、建立模型、修正参数等实现在困难的工作环境中,仍能准确的测量物料的质量。
- 还没有人留言评论。精彩留言会获得点赞!