一种基于机器视觉的汽车端子检测方法与流程
本发明涉及图像处理,尤其涉及一种基于机器视觉的汽车端子检测方法。
背景技术:
1、汽车端子是汽车信号传输的纽带,在汽车的各种功能中起到至关重要的作用。比如,对于汽车音响、汽车鸣笛,通过连接线路与模块之间的信号传输实现音频播放或鸣笛的功能,其中汽车端子普遍作为传输的纽带,以实现汽车的各种功能。
2、在潮湿天气或者洗车时汽车端子可能被淋水,在汽车端子上的水分未干的情况下继续使用汽车端子,很容易导致汽车端子被锈蚀。汽车端子锈蚀会导致汽车信号传输的间断,从而导致其相关功能受阻,这会带来很大的安全隐患。随着机器视觉的发展,利用图像分割技术识别汽车端子的锈蚀情况成为主流方法。当前的gbvs(graph based visualsaliency,基于图的视觉显著性)检测算法主要基于图像内部颜色、纹理以及边缘计算显著性值。主要是根据像素点间的像素值相似度以及像素点位置间的欧氏距离计算边权,而汽车端子的锈蚀会导致不同部位的汽车端子亮度不同,汽车端子正常区域表面较为光洁,其光洁的金属表面容易产生曝光效应,所以传统gbvs视觉显著性检测算法有较大的可能会产生误判,也即传统显著性检测算法区分汽车端子的正常区域与锈蚀区域的准确性不够高。
技术实现思路
1、本发明提供一种基于机器视觉的汽车端子检测方法,旨在提高汽车端子锈蚀情况检测的准确性。
2、为实现上述目的,本发明提供一种基于机器视觉的汽车端子检测方法,所述方法包括:
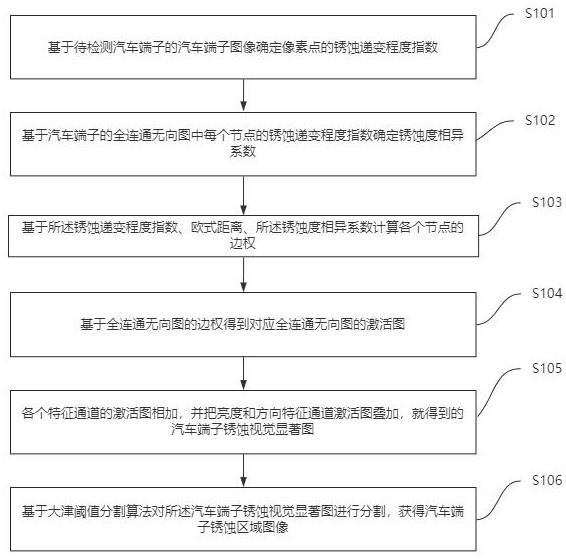
3、基于待检测汽车端子的汽车端子图像确定像素点的锈蚀递变程度指数;
4、基于汽车端子的全连通无向图中每个节点的锈蚀递变程度指数确定锈蚀度相异系数;
5、基于所述锈蚀递变程度指数、欧式距离、所述锈蚀度相异系数计算各个节点的边权;
6、基于全连通无向图的边权得到对应全连通无向图的激活图;
7、各个特征通道的激活图相加,并把亮度和方向特征通道激活图叠加,就得到的汽车端子锈蚀视觉显著图;
8、基于大津阈值分割算法对所述汽车端子锈蚀视觉显著图进行分割,获得汽车端子锈蚀区域图像。
9、可选地,所述基于待检测汽车端子的汽车端子图像确定像素点的锈蚀递变程度指数包括:
10、获取待检测汽车端子的汽车端子图像,基于所述汽车端子图像确定每个像素点的灰度值和亮度值;
11、基于所述灰度值和所述亮度值确定各个像素点的光洁平整度,并基于所述光洁平整度确定像素点的锈蚀递变程度指数。
12、可选地,所述获取待检测汽车端子的汽车端子图像,基于所述汽车端子图像确定每个像素点的灰度值和亮度值包括:
13、获取汽车端子图像,对所述汽车端子图像进行去噪,将去噪后的汽车端子图像转换成汽车端子灰度图像,获取每个像素点的灰度值;
14、将所述汽车端子图像转化为lab颜色空间图像,并获取每个像素点的亮度值。
15、可选地,所述基于所述灰度值和所述亮度值确定各个像素点的光洁平整度,并基于所述光洁平整度确定像素点的锈蚀递变程度指数包括:
16、在汽车端子灰度图像中分别以各个像素点为中心像素点设置预设大小的滑动窗口;
17、基于所述滑动窗口内像素点的亮度值、灰度值以及预设亮度权重、预设灰度权重确定各个像素点的光洁平整度;
18、利用sobel算子获取每个像素点的平整度梯度,基于所述光洁平整度和所述平整度梯度确定锈蚀递变程度指数。
19、可选地,所述方法利用sobel算子获取每个像素点的平整度梯度,基于所述光洁平整度和所述平整度梯度确定锈蚀递变程度指数包括:
20、基于所述光洁平整度和所述平整度梯度确定各个像素点属于锈蚀区域边缘的锈蚀边缘概率;
21、基于所述滑动窗口矩阵,获得相邻光洁平整度差分矩阵;
22、基于所述相邻光洁平整度差分矩阵中的相关数据以及各个像素点的光洁平整度、锈蚀边缘概率确定锈蚀递变程度指数。
23、可选地,所述基于所述光洁平整度和所述平整度梯度确定各个像素点属于锈蚀区域边缘的锈蚀边缘概率包括:
24、对所述滑动窗口内的各个像素点的平整度梯度进行随机采样,将采样结果表示为平整度梯度矩阵;
25、对所述平整度梯度矩阵中的平整度梯度进行随机采样,获得平整度梯度序列;
26、基于所述光洁平整度和所述平整度梯度序列计算每个像素点的锈蚀边缘概率。
27、可选地,所述基于所述滑动窗口矩阵,获得相邻光洁平整度差分矩阵包括:
28、获取每个像素点的光洁平整度,并对所述光洁平整度进行统计,将获得的光洁平整度级别确定为所述相邻光洁平整度差分矩阵的第一列;
29、统计所述第一列中各个光洁平整度出现的第一频数,将所述第一频数确定为所述相邻光洁平整度差分矩阵的第二列;
30、将所述滑动窗口内各个光洁平整度出现的第二频数,将所述第二频数确定为所述相邻光洁平整度差分矩阵的第三列;
31、计算所述滑动窗口中各个相邻像素点的光洁平整度差异之和,将光洁平整度差异之和保存至所述相邻光洁平整度差分矩阵的第四列。
32、可选地,所述基于汽车端子的全连通无向图中每个节点的锈蚀递变程度指数确定锈蚀度相异系数之前,还包括:
33、基于视觉显著性算法提取汽车端子灰度图像的图像特征,获得若干个汽车端子特征图;
34、对每一幅汽车端子特征图,均以每个像素点为节点,构建全连通无向图。
35、可选地,所述基于视觉显著性算法提取所述汽车端子灰度图像的图像特征,获得若干个汽车端子特征图包括:
36、根据得到的汽车端子灰度图像,利用预设尺度的高斯金字塔进行下采样,获得多张下采样图像;
37、将最后三次下采样获得的下采样图像确定为下采样目标图像;
38、计算每张下采样图像的图像特征,其中所述图像特征包括颜色特征和方向特征,其中所述颜色特征包括红色、绿色、蓝色和黄色特征;
39、基于所述颜色特征获得亮度特征图、多张颜色拮抗特征图,基于所述方向特征获得多张方向特征图;
40、将所述亮度特征图和所述方向特征图进行归一化操作,获得汽车端子特征图。
41、可选地,所述基于大津阈值分割算法对所述汽车端子锈蚀视觉显著图进行分割,获得汽车端子锈蚀区域图像包括:
42、统计所述汽车端子锈蚀视觉显著图的灰度值区间;
43、将所述灰度值区间内的每一个灰度值作为初始阈值,基于所述初始阈值将所述灰度值区间分为第一区间和第二区间;
44、统计所述第一区间、第二区间内灰度值的个数占灰度值总个数的比例获得第一比例和第二比例,并计算所述第一区间第一灰度值均值、计算所述第二区间第二灰度值均值、总灰度均值;
45、基于所述第一比例、第二比例、第一灰度值均值、第二灰度值均值以及总灰度均值计算各个初始阈值对应的类间方差;
46、将类间方差最大的初始阈值确定为分割阈值,基于所述分割阈值对所述汽车端子锈蚀视觉显著图进行分割,获得汽车端子锈蚀区域图像。
47、相比现有技术,本发明提出的一种基于机器视觉的汽车端子检测方法,方法包括:基于待检测汽车端子的汽车端子图像确定像素点的锈蚀递变程度指数;基于汽车端子的全连通无向图中每个节点的锈蚀递变程度指数确定锈蚀度相异系数;基于所述锈蚀递变程度指数、欧式距离、所述锈蚀度相异系数计算各个节点的边权;基于全连通无向图的边权得到对应全连通无向图的激活图;各个特征通道的激活图相加,并把亮度和方向特征通道激活图叠加,就得到的汽车端子锈蚀视觉显著图;基于大津阈值分割算法对所述汽车端子锈蚀视觉显著图进行分割,获得汽车端子锈蚀区域图像。如此,根据锈蚀递变程度指数、欧式距离、锈蚀度相异系数获得边权,然后基于全连通无向图中各个节点的边权获得多个激活图,将激活图叠加获得汽车端子锈蚀视觉显著图,并基于汽车端子锈蚀视觉显著图确定汽车端子检测结果,提高了汽车端子锈蚀情况检测的准确性。
- 还没有人留言评论。精彩留言会获得点赞!