一种海上漂浮式平台动态运动辨识方法及装置与流程
本发明涉及系统辨识,尤其是指一种海上漂浮式平台动态运动辨识方法及装置。
背景技术:
1、新能源发电在电网系统中的占比不断提高。风能由于它的清洁性和丰富性,逐渐被人类大规模开发与应用。相对于陆上机组,以漂浮式为代表的海上风电具有资源更丰富,发电稳定,污染更小等优势。但是漂浮式机组在运行服役期间始终承受波浪的载荷作用,而且风机重心更高,对波浪激励更加敏感。
2、系统辨识是指一个可以通过建立分析系统目标对象数学模型的科学方法,可以应用于所有需要使用检测数据信息来确定目标对象数学模型的问题根据得到的动态响应模型来获得传递函数模型的过程。系统辨识可以分为时域辨识与频域辨识。时域辨识应用较早、简便易实现且精度较高。对于漂浮式风机这种动态范围较大的系统,其运动的频率需要更加的细化,针对不同频段需要采用不同的控制手段,如果采用时域辨识,将会拥有极其复杂的工作量。
3、漂浮式平台为风机引入了多个自由度,所以需要分析机组平台的运动特点,以便根据漂浮式平台的运动特点,利用预先设计好的调控策略对漂浮式平台尽心调控,以减少漂浮式平台的运动引起的发电功率不稳定以及震荡带来的共振安全性问题。通常利用系统辨识方法获取来对机组平台的运动状态,常规的辨识方法例如极大似然辨识法,其依托概率论应用广泛,借助过程输出量的概率密度函数,构造一个以观察数据信息与等待辨识的未知参数为自变量的似然函数,找出能使这种构造函数达到最大值的参数估计值。但是,如果假设模型的选取不合理,得出的结果将会非常不理想;且辨识方法运行过程复杂,计算时间长,效率低,容易陷入局部最优解。
4、综上所述,现有的海上漂浮式平台的系统辨识方法由于系统模型构建不合理、辨识方法复杂,导致辨识精度差,进而导致无法准确发现平台的异常振动,存在发电功率不稳定以及共振安全性方面的问题。
技术实现思路
1、为此,本发明所要解决的技术问题在于克服现有技术中由于系统模型构建不合理、辨识方法复杂,导致辨识精度差,无法准确发现平台的异常振动。
2、为解决上述技术问题,本发明提供了一种海上漂浮式平台动态运动辨识方法,包括:
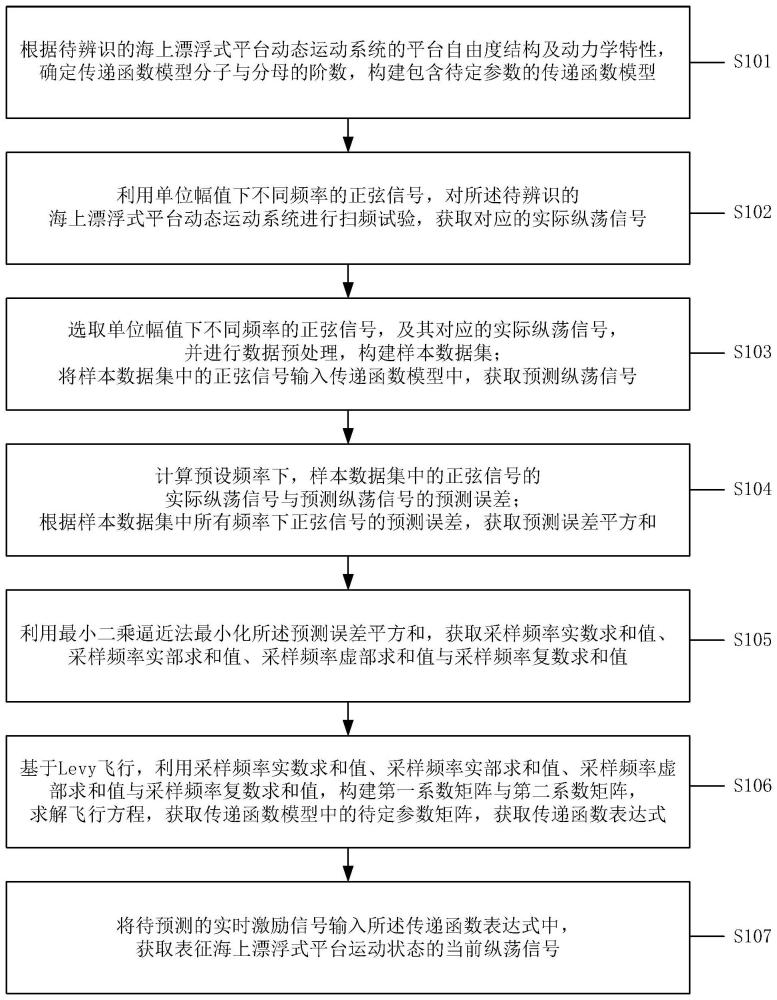
3、根据待辨识的海上漂浮式平台动态运动系统的平台自由度结构及动力学特性,确定传递函数模型分子与分母的阶数,构建包含待定参数的传递函数模型;
4、利用单位幅值下不同频率的正弦信号,对所述待辨识的海上漂浮式平台动态运动系统进行扫频试验,获取对应的实际纵荡信号;
5、选取单位幅值下不同频率的正弦信号,及其对应的实际纵荡信号,并进行数据预处理,构建样本数据集;将样本数据集中的正弦信号输入传递函数模型中,获取预测纵荡信号;
6、计算预设频率下,样本数据集中的正弦信号的实际纵荡信号与预测纵荡信号的预测误差;根据样本数据集中所有频率下正弦信号的预测误差,获取预测误差平方和;
7、利用最小二乘逼近法最小化所述预测误差平方和,获取采样频率实数求和值、采样频率实部求和值、采样频率虚部求和值与采样频率复数求和值;
8、基于levy飞行,利用所述采样频率实数求和值、所述采样频率实部求和值、所述采样频率虚部求和值与所述采样频率复数求和值,构建第一系数矩阵p与第二系数矩阵q,求解飞行方程px=q,获取传递函数模型中的待定参数矩阵x,获取传递函数表达式;
9、将待预测的实时激励信号输入所述传递函数表达式中,获取表征海上漂浮式平台运动状态的当前纵荡信号。
10、在本发明的一个实施例中,所述传递函数模型,表示为:
11、
12、其中,a,b表示待定参数,n≥m,n与m分别表示分母与分子的阶数;ω表示采样频率,j表示虚数单位。
13、在本发明的一个实施例中,所述计算预设频率下,样本数据集中的正弦信号的实际纵荡信号与预测纵荡信号的预测误差,表示为:
14、
15、其中,εk表示预设频率下的预测误差,ωk表示第k个预设频率,g*( )表示预设的实际频率响应传递函数。
16、在本发明的一个实施例中,所述根据样本数据集中所有频率下正弦信号的预测误差,获取预测误差平方和,包括:
17、对样本数据集中所有频率下的正弦信号的预测误差求实数平方和e(jω),表达式为:
18、
19、将所述预测误差代入e(jω)中,将实际频率响应传递函数g*(jωk)表示为复数形式,定义广义误差ek,表示为:
20、ek=εka(jωk)=g*(jωk)a(jωk)-b(jωk)=eik+ejk;
21、基于广义误差ek,获取预测误差平方和j,表示为:
22、
23、其中,εk表示第k个预设频率对应的第k个预测误差,n表示样本数据集中频率的总数量;实际频率响应传递函数的复数形式g*(jωk)=r(jωk)+ji(jωk)。
24、在本发明的一个实施例中,所述利用最小二乘逼近法最小化所述预测误差平方和,获取采样频率实数求和值、采样频率实部求和值、采样频率虚部求和值与采样频率复数求和值,包括:
25、以所述预测误差平方和j最小为优化目标,对传递函数模型中的待定参数a、b求偏导,表示为:
26、
27、
28、简化得:
29、采样频率实数求和值
30、采样频率实部求和值
31、采样频率虚部求和值
32、采样频率复数求和值
33、在本发明的一个实施例中,所述基于levy飞行,利用所述采样频率实数求和值、所述采样频率实部求和值、所述采样频率虚部求和值与所述采样频率复数求和值,构建第一系数矩阵p与第二系数矩阵q,求解飞行方程px=q,获取传递函数模型中的待定参数矩阵x,包括:
34、第一系数矩阵p,表示为:
35、
36、第二系数矩阵q,表示为:q=[s0,t1,s2,t3,…,0,u2,0,…]t;
37、根据levy飞行公式px=q,求解出传递函数模型中的待定参数矩阵,表示为:
38、x=[b0,b1,…,bm,a1,a2,…,an]t。
39、在本发明的一个实施例中,获取传递函数表达式后还包括:
40、获取样本数据集中的正弦信号对应的实际纵荡信号的幅值与相位,拟合成幅频特性曲线和相频特性曲线;
41、基于所述相频特性曲线,利用自动控制原理对所述海上漂浮式平台动态运动系统的平台自由度进行辨识,获取所述传递函数表达式的零极点;
42、根据所述零极点位置,消除比主导极点距离虚轴更远的零极点,对所述传递函数表达式进行简化,获取传递函数表达式。
43、在本发明的一个实施例中,纵荡信号包括海上漂浮式平台在水平方向上的位移、速度和加速度;对纵荡信号进行数据预处理包括数据清洗、滤波。
44、在本发明的一个实施例中,所述获取表征海上漂浮式平台运动状态的当前纵荡信号后,还包括对所述当前纵荡信号进行去噪滤波;利用自相关函数,获取海上漂浮式平台的固有频率、阻尼比与当前振动频率;根据所述当前振动频率,获取海上漂浮式平台的运动状态。
45、本发明实施例还提供了一种海上漂浮式平台动态运动辨识装置,包括:
46、传递函数构建模块,用于根据待辨识的海上漂浮式平台动态运动系统的平台自由度结构及动力学特性,确定传递函数模型分子与分母的阶数,构建包含待定参数的传递函数模型;
47、扫频模块,用于利用单位幅值下不同频率的正弦信号,对所述待辨识的海上漂浮式平台动态运动系统进行扫频试验,获取对应的实际纵荡信号;
48、样本预测模块,用于选取单位幅值下不同频率的正弦信号,及其对应的实际纵荡信号,并进行数据预处理,构建样本数据集;将样本数据集中的正弦信号输入传递函数模型中,获取预测纵荡信号;
49、误差平方和计算模块,用于计算预设频率下,样本数据集中的正弦信号的实际纵荡信号与预测纵荡信号的预测误差;根据样本数据集中所有频率下正弦信号的预测误差,获取预测误差平方和;
50、传递函数获取模块,用于利用最小二乘逼近法最小化所述预测误差平方和,获取采样频率实数求和值、采样频率实部求和值、采样频率虚部求和值与采样频率复数求和值;基于levy飞行,利用所述采样频率实数求和值、所述采样频率实部求和值、所述采样频率虚部求和值与所述采样频率复数求和值,构建第一系数矩阵p与第二系数矩阵q,求解飞行方程px=q,获取传递函数模型中的待定参数矩阵x,获取传递函数表达式;
51、预测模块,用于将待预测的实时激励信号输入所述传递函数表达式中,获取表征海上漂浮式平台运动状态的当前纵荡信号。
52、本发明的上述技术方案相比现有技术具有以下优点:
53、本发明所述的海上漂浮式平台动态运动辨识方法,针对海上漂浮式平台的平台自由度结构及动力学特性,构建出传递函数模型;利用levy对平台自由度进行辨识,将复杂系统辨识成熟悉的传递函数表达式,方便观察海上漂浮式平台的运动特点,进而方便对海上漂浮式平台进行控制,提高平台稳定性;本发明利用最小二乘逼近法最小化预测误差平方和,基于levy飞行公式辨识出的传递函数拟合精度高,且拟合算法原理简单、计算效率高,提高了辨识速度;
54、本发明根据辨识出的海上漂浮式平台运动状态的当前纵荡信号,获取海上漂浮式平台的位移、速度、加速度与当前振动频率,从而准确识别出当前运动状态,以便根据当前运动状态控制海上漂浮式平台,进而减少漂浮式平台的运动引起的发电功率不稳定以及震荡带来的共振安全性问题。
- 还没有人留言评论。精彩留言会获得点赞!