一种基于三维激光扫描技术的基坑巡检作业方法与流程
本发明涉及土木工程,具体为一种基于三维激光扫描技术的基坑巡检作业方法。
背景技术:
1、基坑工程是工程施工中的关键环节,但也是最危险的部分之一。基坑工程开挖和使用过程的安全风险通常集中在:各种原因导致的基坑变形超限、地下水的渗漏突涌等方面。这些风险不仅会对工程质量产生威胁,也对严重影响施工作业人员的安全。因此,基坑相关作业中需要对其进行严密监测和巡视检查。
2、按照国家标准《建筑基坑工程监测技术标准》(gb 50497-2019)要求:基坑工程施工和使用期内,每天均应由专人进行巡视检查。进行巡视检查的项目包括:基坑有无涌土、流砂、管涌;面层有无开裂、脱落;止水帷幕有无开裂、渗漏水;坑底有无积水等。
3、然而,基坑工程人工巡视检查工作十分繁琐,同时对某些基坑工程问题或缺陷检查的主观性较强,人工判断基坑工程问题或缺陷的过程可能发生误判,甚至施工现场巡检人员随意编造巡视检查记录的情况也时有发生。以上这些情况可能导致极为严重的基坑开挖安全事故。因此,如何在基坑开挖中实现自动化综合巡检,是基坑工程领域亟待解决的问题之一。基于此,提出了一种基于三维激光扫描技术的基坑巡检作业方法,为解决上述问题提供一种技术方案。
技术实现思路
1、本发明的目的在于提供一种基于三维激光扫描技术的基坑巡检作业方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:包括以下步骤:
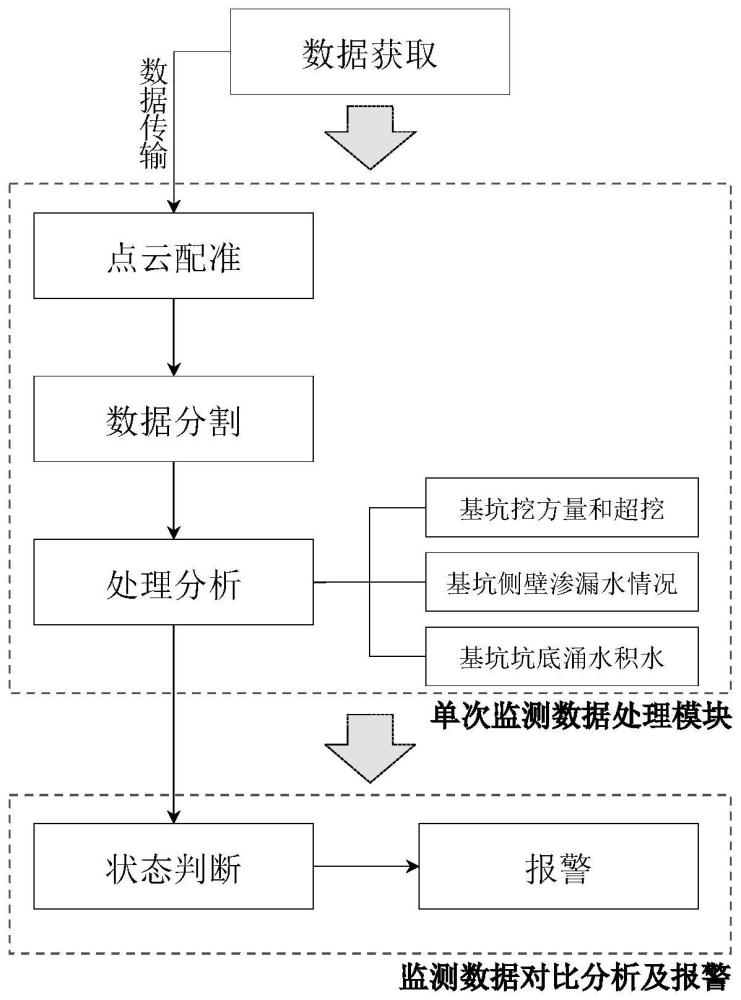
3、第一步:通过数据获取模块对施工中的基坑进行扫描,以获取基坑点云数据;
4、第二步:将获取的基坑点云数据传输至单次监测数据处理模块;
5、第三步:通过单次监测数据处理模块进行点云配准、数据分割,对三维激光点云数据进行处理分析;
6、第四步:通过监测数据对比分析及报警模块进行超挖判断及报警、挖方速度判断及报警和新增渗水判断及报警。
7、进一步的,所述数据获取模块为三维激光扫描器。
8、进一步的,所述获取的基坑点云数据包括基坑激光点云坐标数据和基坑激光点云反射率数据。
9、进一步的,所述点云配准分为粗配准和精配准,配准过程以点云坐标数据为基础,不考虑激光反射数据;
10、其中一个可行的配准算法是随机抽样一致算法(ransac),其流程是首先确定一组点云为配准基准组,另选取一组点云为待配准组,之后随机选取两组点云的一部分点作为初始数据,获得对应的最优变换关系,按此变换关系对剩余数据进行测试获得配准误差,重复迭代以上操作选取配准误差最小的一组变换关系并应用,此时配准完成。
11、进一步的,所述数据分割包括以下步骤:
12、将点云数据按照各基坑侧壁、基坑坑底进行分割;
13、一个矩形基坑分割后将分别形成4个侧壁点云坐标数据、基坑底点云坐标数据、4个侧壁激光反射率数据、基坑底激光反射率数据。
14、进一步的,所述对三维激光点云数据进行处理分析包括基坑挖方量统计和超挖监测、基坑侧壁渗漏水情况分析和基坑坑底涌水积水巡检。
15、进一步的,所述基坑挖方量统计和超挖监测包括以下步骤:
16、①准备数据
17、预设挖方控制高程zc(i);
18、预设基坑底部尺寸;基坑坑底长边长度a,基坑坑底短边长度b;
19、预设采样步长;通过预设采样点数设置步长,设置基坑底部长边和短边对应采样点数da、db;
20、提取基坑坑底的激光点云位置数据z(i,t);
21、获取坑底面上次激光点云位置数据z(i,t-t);
22、其中:z为深度坐标,i为激光点编号,t为当次扫描时间,t为扫描周期;
23、②计算
24、阶段挖方量:
25、
26、其中,n为基坑底点云个数,i为激光点编号,z为点云位置数据,t为当次扫描时间,t为扫描周期,a为基坑坑底长边长度,b为基坑坑底短边长度,da、db分别为基坑底部长边和短边对应采样点数;
27、挖方施工速率:
28、
29、其中,n为基坑底点云个数,i为激光点编号,z为点云位置数据,t为当次扫描时间,t为扫描周期,a为基坑坑底长边长度,b为基坑坑底短边长度,da、db分别为基坑底部长边和短边对应采样点数;
30、当前累计挖方量:
31、
32、其中,n为基坑底点云个数,i为激光点编号,z为点云位置数据,t为当次扫描时间,t为扫描周期,a为基坑坑底长边长度,b为基坑坑底短边长度,da、db分别为基坑底部长边和短边对应采样点数。
33、进一步的,所述基坑侧壁渗漏水情况分析包括以下步骤:
34、①提取基坑其中一面侧壁的激光点云反射率数据;
35、②设置反射率阈值将点云反射率数据处理为二值数据集合,超过反射率阈值的点记为1,否则记为0,反射率阈值需多次试验获得;二值处理方法按以下公式进行:
36、
37、其中,x和y为基坑侧壁平面的位置坐标,r1(x,y)为点云反射率二值数据,r0(x,y)为反射率数据进行二值处理前的数据,tr为反射率阈值;
38、③采用滤波方法去除二值数据噪声,形成用以进行渗水区域识别的二值数据集合;滤波方法为中值滤波,其计算过程为:设置合适的滤波窗口,用中心点滤波模板范围内数据中值来替换中心点原始数据值,然后用模板中心点遍历所有点云数据并按以上步骤进行处理;其计算过程表示为:
39、
40、其中,r2(x,y)为中值滤波后的二值数据,w为中值滤波模板窗口内数据集合;
41、④渗水面积计算;通过预设的点云步距数值,结合某渗水区域内的点云数量进行计算,公式为:
42、
43、其中,a为基坑侧壁横边长度,b为基坑深度,da为横边点云个数,db为深度方向点云数据,m为某渗水区域内点云个数;
44、⑤设置最小渗水识别面积阈值并进行筛选,以去除不合理数据;筛选公式为:
45、
46、其中,a0为识别得到的各渗水水渍块面积,a1为经过面积筛选后的面积数据,ta为面积阈值。
47、进一步的,所述基坑坑底涌水积水巡检包括以下步骤:
48、通过遍历坑底反射激光参数,判断各点所处状态为“干燥”或“积水”,进而通过统计某一范围处于“积水”状态的激光点个数获得坑底涌水面积;当某次激光扫描结果获得的坑底涌水面积超过限值,或涌水面积增加速度超过限值,即提示并报警。
49、进一步的,所述超挖判断及报警按以下公式进行:
50、
51、其中,zc(i)为预设挖方控制高程;z(i,t)为基坑底点云位置数据;
52、所述挖方速度判断及报警按以下公式进行:
53、
54、其中,v为挖方施工速率;vc2为挖方施工速率控制上限;vc1为挖方施工速率控制下限;
55、所述新增渗水判断及报警包括以下步骤:
56、对比上次渗水识别结果判断是否新增渗水并报警。
57、与现有技术相比,本发明的有益效果是:
58、本发明充分利用了激光扫描设备获取的三维位置坐标和反射率,实现了高精度超挖识别和进度监测、可靠的渗漏水和涌水积水识别,且无需埋设监测元件,无需接触被测目标,极大降低了基坑施工巡检工作量,避免了巡检工作的主观性,降低了基坑工程的施工风险;
59、通过点云位置坐标数据的处理,实现了基坑开挖进度监测和超挖预警功能,相较于传统的人工监测,其精度和灵敏度更高,在防止挖掘机械局部超挖等事故中效果更好;实现了基坑工程自动化综合巡检。
- 还没有人留言评论。精彩留言会获得点赞!