一种飞机蒙皮形变分析与喷涂路径随形优化方法与流程
本发明属于飞机蒙皮喷涂路径规划方法,尤其涉及一种飞机蒙皮形变分析与喷涂路径随形优化方法。
背景技术:
1、飞机蒙皮喷涂中,漆面外观一般要求漆膜均匀、平整地覆盖基体材料,无缩孔、气泡、针孔、流挂、流淌痕、波纹、灰尘、绒毛、干喷雾、过喷、碎屑、划伤等缺陷,无放大目视观察时,涂覆的底漆应连续覆盖、无空白,无可见的固体颗粒、污染物、鱼眼、针孔、鼓泡、过喷等缺陷。当距离涂层表面2m-3m处无放大目视观察时,应无可见的不均匀、流淌、纹路、流挂和桔皮等现象。此外,根据所喷涂漆种类不同,一般要求漆干膜厚度在10-50μm不等。随着飞机制造行业对飞机外观及性能的追求,对漆干膜的要求也相应提高。
2、飞机蒙皮喷涂时,将蒙皮安装到特定工装上,以人工观察情况或蒙皮数学模型作为参考,结合喷涂的工艺要求,设计规划喷涂路径。由于蒙皮厚度小且其形状多呈复杂双曲面,使得其安装到工装上受力不均,极易造成形变。当前采用的人工喷涂和按照数学模型生成喷涂路径的方法,对蒙皮实际形变缺乏感知和量化,只能通过工艺调整或针对实时数据的自身形变情况进行计算使得漆干膜质量尽可能达到工艺要求。目前,能够考虑形变情况的路径优化方法为,每放置一张蒙皮时进行一次点云数据采集,将点云数据进行切片和拟合等处理,计算出实际喷涂路径。但是,对单张蒙皮进行数据采集和基于点云数据的路径计算的数据量大、数据处理工作繁琐、耗时长、对计算机存储空间和运行速度的要求高,路径规划的效率很低。因此,为了保证蒙皮喷涂质量、提高加工效率,使之达到新一代飞机的设计制造标准,开发蒙皮喷涂路径规划的高效化、自动化、智能化方法已成为技术人员需要面对的重要课题。
技术实现思路
1、为了解决现有飞机蒙皮喷涂路径优化方法需对单张蒙皮进行数据采集和基于点云数据进行路径计算,数据量大、数据处理工作繁琐、耗时长、对计算机存储空间和运行速度要求高、路径规划效率很低等问题,本发明提出了一种新的飞机蒙皮形变分析与喷涂路径随形优化方法。
2、本方法针对飞机的蒙皮框架结构,以kuka工业机器人为载体,利用3d面激光传感器获取蒙皮形状信息,提供符合实际蒙皮形状的点云数据,然后通过对点云数据与理论数学模型的对应区块形变分析,优化理论喷涂路径,指导机器人完成随形喷涂运动任务,提升加工过程适应性。
3、本方法的实施系统以软件系统为主,搭建硬件平台对其进行验证。其中,软件系统主要包括位于上位机的数据分析和处理系统;硬件平台主要包括3d面激光传感器、kuka机器人、喷涂模块、激光跟踪仪以及系统组装与功能实现所必须的结构件。通过硬件平台与软件系统的相互结合,本方法的实施系统能够实现在线与离线模式下精确的加工基准提取与喷涂路径实时规划等功能。
4、具体地,本发明提供了一种飞机蒙皮形变分析与喷涂路径随形优化方法,本方法包括:
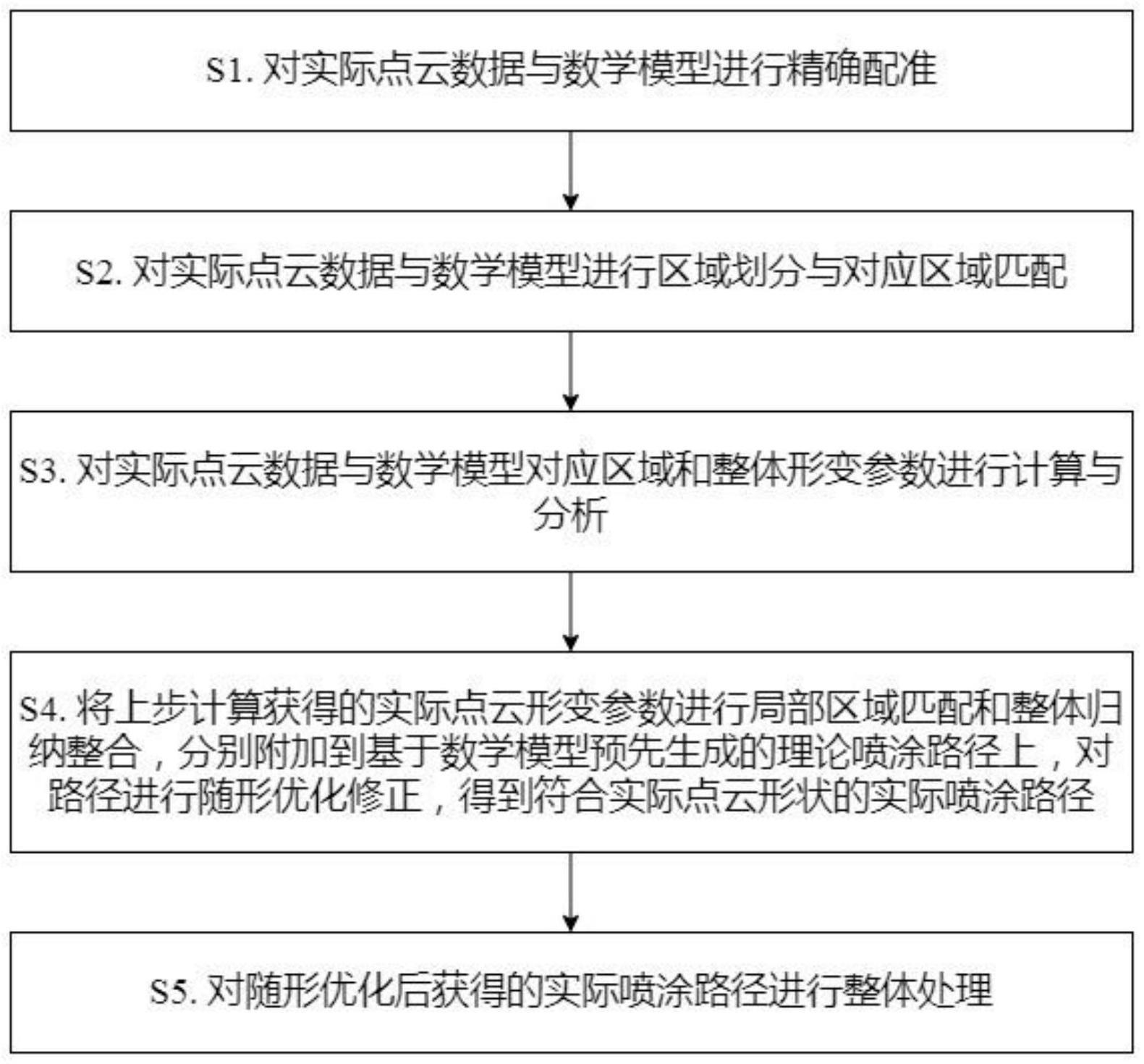
5、s1.对实际点云数据与数学模型进行精确配准;
6、s2.对实际点云数据与数学模型进行区域划分与对应区域匹配;
7、s3.对实际点云数据与数学模型对应区域和整体形变参数进行计算与分析;
8、s4.将上步计算获得的实际点云形变参数进行局部区域匹配和整体归纳整合,分别附加到基于数学模型预先生成的理论喷涂路径上,对路径进行随形优化修正,得到符合实际点云形状的实际喷涂路径;
9、s5.对随形优化后获得的实际喷涂路径进行整体处理。
10、进一步地,本发明飞机蒙皮形变分析与喷涂路径随形优化方法步骤s1中所述的对实际点云数据与数学模型进行精确配准,是通过求两个点云之间的旋转平移矩阵,将源点云或数学模型变换到目标点云或数学模型相同的坐标系下,可以表示为以下方程:
11、pt=r·ps+t
12、其中,pt和ps就是一对对应点,r是点云和数学模型的旋转矩阵,t是平移向量。
13、进一步地,本发明飞机蒙皮形变分析与喷涂路径随形优化方法步骤s1中所述的对实际点云数据与数学模型进行精确配准,包括:
14、s11.首先进行粗配准,使实际点云数据与数学模型在主方向上重合;点云数据的主方向通过计算所有点的特征向量得到或通过计算包围盒的方式实现;数学模型的主方向通过计算三角面片顶点特征向量得到;除主方向外,进一步获取到与主方向垂直的两个次方向,由此建立一个以重心为原点,主方向和次方向为坐标轴的参考坐标系;将实际点云数据与数学模型的参考坐标系调整到一致,即可实现实际点云数据与数学模型的粗配准;
15、s12.完成实际点云数据与数学模型的粗配准后,进一步进行精配准;
16、目标点集a对应参考点集s,对应点集应满足以下条件:
17、(1)a中点的个数和s中点的个数相等;
18、(2)对于a中每一个点ai都应该对应于s中具有相同下标的点si;
19、设旋转变换向量为单位四元数qr=[q0q1q2q3]t,其中,q0≥0,且q02+q12+q22+q32=1,可得3×3旋转矩阵r(qr);
20、设平移变换向量为qt=[q4q5q6]t,可得完全坐标变换向量q=[qr|qt]t;
21、求对应点集间的最佳坐标变换向量问题转化为求q使得函数最小化问题:
22、算法如下:
23、(1)得到对应点集实际点云数据集a和数学模型集s;
24、(2)分别计算a和s的重心:
25、
26、(3)由两点集构造3×3协方差矩阵:
27、
28、(4)由协方差矩阵构造4×4对称矩阵:
29、
30、其中,tr(∑as)是矩阵∑as的迹,δ=[p23 p31 p12]t,i3是3×3单位矩阵;
31、(5)计算q(∑as)特征值和特征向量,其最大特征值对应的特征向量就是最佳旋转向量qr=[q0q1q2q3]t;
32、(6)计算最佳平移向量:
33、qt=μs-r(qr)μa
34、其中,
35、
36、(7)根据旋转、平移向量对a进行坐标变换;
37、(8)计算误差判断是否仍需迭代,若误差小于设定值则停止迭代,否则继续迭代;
38、(9)完成精配准。
39、进一步地,本发明飞机蒙皮形变分析与喷涂路径随形优化方法步骤s11中所述的进行粗配准,包括:设vp为点云数据的包围盒体积,vs为数学模型的包围盒体积,vi为点云数据包围盒与数学模型包围盒相交得到的包围盒的体积,则包围盒重合系数λ为:
40、
41、ε为设定值,如果λ>ε,则点云数据与数学模型接近重合,否则不接近重合,仍需优化处理。
42、进一步地,本发明飞机蒙皮形变分析与喷涂路径随形优化方法步骤s2中所述的对实际点云数据与数学模型进行区域划分与对应区域匹配,包括:基于数学模型预先生成符合数学模型形状特征和工艺要求的理论喷涂路径,按照理论喷涂路径和工艺参数反推计算数学模型的区域划分方式,生成区域边界线或划分线,将配准后的实际点云切分成多个区域,使划分后的区域可以准确表达实际点云的形状信息,并使各区域的实际点云与数学模型准确对应。
43、进一步地,本发明飞机蒙皮形变分析与喷涂路径随形优化方法步骤s3中所述的对实际点云数据与数学模型对应区域和整体形变参数进行计算与分析,包括根据步骤s2中划分后的对应区域,对每个区域内的实际点云数据进行曲面拟合,计算其中心点坐标、区域点云曲率和曲面法向量参数,以此分析实际点云相对于数学模型发生的局部形变和整体形变。
44、进一步地,本发明飞机蒙皮形变分析与喷涂路径随形优化方法中所述区域点云曲率和曲面法向量通过下述两种方法中的任一种计算获得:
45、(一)使用二次曲面拟合求点云曲率
46、在散乱点云中取一个数据点pi,然后以pi为中心在点云中均匀地取n个点,这n个点尽可能覆盖整个点云;利用最小二乘法拟合二次曲面z(x,y)=ax2+bxy+cy2,解得系数后根据空间曲面曲线的性质计算数据点的高斯曲率和平均曲率;
47、对于测量点云内任意数据点的m邻域,根据最小二乘原理需使下式取最小值:
48、
49、式中,xj,yj,zj是邻域内的点,a,b,c为二次曲面方程系数;将上式分别对系数求导,使其为0,得出下式:
50、
51、由此,解出二次曲面系数;将曲线方程写成曲面参数方程形式:
52、
53、若曲面上存在一条曲线r,t是时间,r是空间矢量,则r的表达式为:
54、r=r(x(t),,y(t));
55、若以s表示曲线r的弧长,则由复合函数求导公式可求得弧长微分公式:
56、
57、由曲面的第一基本公式可得:
58、(ds)2=i=e(dx)2+2fdxdy+g(dy)2;
59、其中,e,f,g是曲面第一基本式的基本量;假如p是曲线r上一点,用t和n分别表示p点的单位切向量和单位法向量,则曲率向量可分解为:
60、
61、曲线的单位法向量n表示为:
62、
63、可得曲面的第二基本公式:
64、
65、法曲率可表示为:
66、
67、处理变量λ可得到kn的两基根k1,k2,从而根据曲率特性可求得:
68、高斯曲率:
69、
70、平均曲率:
71、
72、(二)利用某点相邻范围内各点的法向量综合计算点云曲率
73、为了估计一个点的曲率,只考虑一个相邻点的贡献,并将其转换为一条正截面曲线的构造;
74、构造一个法向截面圆,并根据目标点和其相邻点的位置和法向量来估计法向曲率;
75、使用法曲率的局部拟合计算;对于点云中的每个点p,设p点的单位法向量为n,使用点坐标和法向量来估计点p处的法向曲率的方法如下:
76、假设p点的附近有m个近邻点,qi为点p的第i个近邻点,qi的法向量为mi,设正交坐标系p、x、y、z为p点的局部坐标系l,n表示p点的法向量,x和y为正交的单位向量;在l中,p、qi、mi的坐标分别为p(0,0,0),qi(xi,yi,zi),mi(nx,i,ny,i,nz,i);用一个通过点p的密切圆来估计点p的法曲率
77、则p相对于qi的法曲率估计如下:
78、
79、式中,α是向量-n和pqi之间的夹角,β是向量n和mi之间的夹角。
80、进一步地,本发明飞机蒙皮形变分析与喷涂路径随形优化方法步骤s3中所述的对实际点云数据与数学模型对应区域和整体形变参数进行计算与分析,还包括:
81、计算对应区域内的实际点云法向量,将确定表面一点法线的问题转换为一个最小二乘法平面拟合的问题;因此,估计表面法线的解决方案就变成了分析一个协方差矩阵的特征向量和特征值,这个协方差矩阵从查询点的近邻元素中创建;最大主成分为投影到某方向后方差最大的方向;而法向量为投影到某方向后,信息量最小的方向,因此需要进行主成分分析pca变换,将点云投影到特征值最小的方向;
82、法向量求解步骤:
83、目标平面由一个点x和一个法向量来表示,且一个点pi∈pk到平面的距离为:即取平面上一点,平面外一点到平面的距离,就是这两点组成的向量在法向量上面的投影;如果点到平面的距离为0,即di=0,就可以求出平面的法向量;因此通过以下步骤:
84、(1)求所有点的质心pk:
85、
86、(2)计算质心pk的协方差矩阵c∈r3×3,及其特征向量和特征值:
87、
88、其中,∈为1,c是对称和半正定矩阵且它的特征值是实数λj∈r,特征向量形成了正交坐标系,相对应于质心pk的主成分;如果0≤λ0≤λ1≤λ2,最小特征值λ0的特征向量就是法向量或者的近似,或者可以在球坐标系下用表示:
89、
90、通过主成分分析法来计算它的方向具有二异性,无法对整个点云数据集的法向方向进行一致性定向;解决这个问题的办法是使用视点vp,对所有法线定向只需要使它们一致朝向视点的方向,满足下面的方程式:
91、
92、对任意一个点pi,从下式中计算协方差矩阵:
93、
94、其中,k是pi点的近邻点个数,表示近邻点的三维质心,λj表示协方差矩阵的第j个特征值,vj表示第j个特征向量。
95、进一步地,本发明飞机蒙皮形变分析与喷涂路径随形优化方法步骤s5中所述的对随形优化后获得的实际喷涂路径进行整体处理,包括:
96、对路径进行平滑优化拟合;
97、根据机器人的运行速度要求,对路径进行拟合和插值处理;
98、对多条非首尾相接的路径进行自适应智能规划,根据最短距离、机器人限位规则进行多条路径衔接;
99、进行末端喷涂开关时机和更换漆桶时机的规划。
100、另一方面,本发明还提供了一种飞机蒙皮形变分析与喷涂路径随形优化系统,本系统针对飞机的蒙皮框架结构,以kuka工业机器人为载体,利用3d面激光传感器获取蒙皮形状信息,提供符合实际蒙皮形状的点云数据,然后通过对点云数据与理论数学模型的对应区块形变分析,优化理论喷涂路径,指导机器人完成随形喷涂运动任务,提升加工过程适应性。
101、本系统以软件系统为主,搭建硬件平台对其进行验证;其中,软件系统主要包括位于上位机的数据分析和处理系统;硬件平台主要包括3d面激光传感器、kuka机器人、喷涂模块、激光跟踪仪以及系统组装与功能实现所必须的结构件;通过硬件平台与软件系统的相互结合,本系统能够实现在线与离线模式下精确的加工基准提取与喷涂路径实时规划等功能。
102、此外,本发明还涉及上述飞机蒙皮形变分析与喷涂路径随形优化方法及系统在飞机装配工业中的应用。
103、综上,本发明飞机蒙皮形变分析与喷涂路径随形优化方法及系统具有以下特点:
104、1)实际点云数据与数学模型的精确配准
105、除常见的配准方法外,本方案还引入了包围盒、局部特征配准、形变数据配准等技术,综合进行点云数据与数学模型的配准。综合多种技术进行配准,可以从多个角度解决配准问题,从而在实际应用场景下降低计算量并提高精度。
106、2)点云数据与数学模型的区域划分与对应区域匹配
107、基于数学模型预先生成符合数学模型形状特征和工艺要求的理论喷涂路径,按照理论喷涂路径和工艺参数反推计算数模的区域划分方式,生成区域边界线或划分线,将配准后的实际点云切分成多个区域,使划分后的区域可以准确表达实际点云的形状等信息,且各区域的实际点云与数学模型准确对应。
108、3)点云数据与数学模型对应区域和整体形变参数计算与分析
109、根据划分后的对应区域,计算中心、曲率和法向量等参数,以此分析实际点云相对于数学模型发生的局部形变和整体形变。
110、4)基于点云形变参数的路径随形优化
111、将计算得出的局部形变参数和整体形变参数进行局部区域匹配和整体归纳整合,分别附加到基于数学模型预先生成的理论路径上,对路径进行随形优化修正,得到符合实际点云形状的实际喷涂路径。
112、5)随形优化后路径的整体处理
113、将随形优化修正后的实际喷涂路径进行整体处理,对路径进行平滑等优化拟合,根据机器人的运行速度等要求,对路径进行拟合和插值处理,对多条非首尾相接的路径进行自适应智能规划,根据最短距离、机器人限位等规则进行多条路径衔接,以及末端喷涂开关时机和更换漆桶时机的规划,合理利用喷漆,提高喷涂效率和质量,避免喷漆浪费,减少环境污染。
- 还没有人留言评论。精彩留言会获得点赞!