一维标尺无重叠视场多视觉传感器外参标定方法及装置与流程
本公开属于核电,具体涉及一种一维标尺无重叠视场多视觉传感器外参标定方法及装置。
背景技术:
1、近年来,大视场多摄像头系统技术发展迅速,在全视场三维测量、室外环境定位、车道合并观测、柔性曲面轮廓、自动驾驶系统等领域得到了广泛的应用。这些系统中,视场范围比较大,视觉传感器所覆盖的面积较大。大视场多摄像头系统分布在多个视觉传感器中,单个视觉传感器之间没有重叠的视场。多视觉传感器构成的系统中,全局坐标系的建立至关重要,它是测量数据的基础,便于不同坐标系的数据转换为统一的参考系。值得注意的是,这种转换不影响单个视觉传感器的测量精度,因为它不涉及它们的内部参数。然而,全局坐标系的精度依赖于视觉传感器的整体空间排列,这是实现整个非重叠视觉传感器系统高精度测量的关键因素。
2、在非重叠多视觉传感器系统的标定中,实现统一的坐标系涉及到使用视觉传感器捕获三维空间内已知物体的位置和大小。目前,非重叠视觉传感器标定可大致分为动态目标捕获和标定目标捕获两大类。后者根据标定对象的类型和形状又细分为一维标尺标定、平面标定板标定和三维物体标定。此外,一些研究人员已经探索了替代方法,例如使用三维测量设备或镜子来校准非重叠的视觉传感器。
3、对于不共视场的多视觉传感器坐标系统一,在一般场景下,无法使用较大范围的平面标定板对其进行标定,同时由于制造工艺的问题采用一维标尺或者两个标定板刚性连接等方式对不共视场视觉传感器标定很难保证标定的精度,因此需要一种标定精度高,标定方法简便,适用场景广泛的不共视场视觉传感器的标定方法。
技术实现思路
1、为克服相关技术中存在的问题,提供了一种一维标尺无重叠视场多视觉传感器外参标定方法及装置。
2、根据本公开实施例的一方面,提供一种一维标尺无重叠视场多视觉传感器外参标定方法,所述方法包括:
3、步骤11,根据标尺上环状编码中心点三维世界坐标与识别得到的像素坐标确定标尺到视觉传感器的转换关系初值,所述旋转关系包括旋转矩阵和平移矩阵;
4、步骤12,根据所述转换关系初值,确定双目视觉传感器坐标系下的三维点坐标;
5、步骤13,对于任意两个不共视场的视觉传感器,构建该两个视觉传感器的测量距离与真实距离的目标函数,优化旋转矩阵和平移矩阵使得目标函数最小,最终得到需要的旋转和平移矩阵。
6、在一种可能的实现方式中,所述方法还包括:
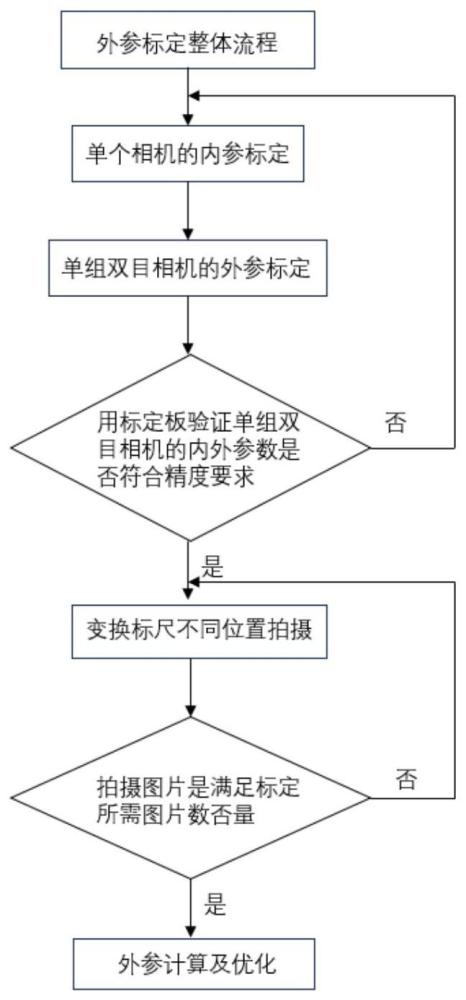
7、步骤21,在相机的工作视场范围内,采用多层金字塔形状的标尺移动轨迹对摄像机进行非重叠标定,每层包括多个轨迹点,多个轨迹点呈网格排列,在每一个轨迹点上,比例尺都会围绕比例尺坐标系的y轴发生多个倾斜角度的变化,每旋转一次采集一幅标定图像,实现非重叠相机系统的全局外部标定。
8、根据本公开实施例的另一方面,提供一种基于一维标尺的无重叠视场多视觉传感器外参标定装置,所述装置包括:
9、第一确定模块,用于根据标尺上环状编码中心点三维世界坐标与识别得到的像素坐标确定标尺到视觉传感器的转换关系初值,所述旋转关系包括旋转矩阵和平移矩阵;
10、第二确定模块,用于根据所述转换关系初值,确定双目视觉传感器坐标系下的三维点坐标;
11、第三确定模块,用于对于任意两个不共视场的视觉传感器,构建该两个视觉传感器的测量距离与真实距离的目标函数,优化旋转矩阵和平移矩阵使得目标函数最小,最终得到需要的旋转和平移矩阵。
12、在一种可能的实现方式中,所述装置还包括:
13、采集模块,用于在相机的工作视场范围内,采用多层金字塔形状的标尺移动轨迹对摄像机进行非重叠标定,每层包括多个轨迹点,多个轨迹点呈网格排列,在每一个轨迹点上,比例尺都会围绕比例尺坐标系的y轴发生多个倾斜角度的变化,每旋转一次采集一幅标定图像,实现非重叠相机系统的全局外部标定。
14、根据本公开实施例的另一方面,提供一种基于一维标尺的无重叠视场多视觉传感器外参标定装置,所述装置包括:
15、处理器;
16、用于存储处理器可执行指令的存储器;
17、其中,所述处理器被配置为执行上述的方法。
18、根据本公开实施例的另一方面,提供一种非易失性计算机可读存储介质,其上存储有计算机程序指令,所述计算机程序指令被处理器执行时实现上述方法。
19、本公开的有益效果在于:本公开的一维标尺无重叠视场多视觉传感器外参标定方法利用贴有两层环状编码点的标尺进行不共视场多视觉传感器标定,采用粘贴有双层环状编码点的标尺对不共视场的多视觉传感器进行标定,对于任意两个不共视场的单目视觉传感器,在两个视觉传感器的视野范围内,多次移动标尺,通过任意一次移动来求出不共视场单目视觉传感器之间的转换关系初值,构建测量编码点之间的距离与实际距离之差作为目标函数,利用非线性优化的方法使得距离之差最小从而实现对坐标系之间转换关系的最优化。本公开的方法操作简单,适用场景多样,不依赖复杂目标的约束并且有很高的标定精度,可以广泛用于不共视场视觉传感器的标定。
技术特征:
1.一种一维标尺无重叠视场多视觉传感器外参标定方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述方法还包括:
3.一种一维标尺无重叠视场多视觉传感器外参标定装置,其特征在于,所述装置包括:
4.根据权利要求1所述的装置,其特征在于,所述装置还包括:
5.一种一维标尺无重叠视场多视觉传感器外参标定装置,其特征在于,所述装置包括:
6.一种非易失性计算机可读存储介质,其上存储有计算机程序指令,其特征在于,所述计算机程序指令被处理器执行时实现权利要求1或2所述的方法。
技术总结
本公开属于核电技术领域,具体涉及一种一维标尺无重叠视场多视觉传感器外参标定方法及装置。本公开的一维标尺无重叠视场多视觉传感器外参标定方法及装置利用贴有两层环状编码点的标尺进行不共视场多视觉传感器标定,采用粘贴有双层环状编码点的标尺对不共视场的多视觉传感器进行标定,对于任意两个不共视场的单目视觉传感器,在两个视觉传感器的视野范围内,多次移动标尺,通过任意一次移动来求出不共视场单目视觉传感器之间的转换关系初值,构建测量编码点之间的距离与实际距离之差作为目标函数,利用非线性优化的方法使得距离之差最小从而实现对坐标系之间转换关系的最优化。
技术研发人员:李莉,解则晓,李业成,刘涛,龚雪琼,耿贺辉
受保护的技术使用者:中核武汉核电运行技术股份有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!