基于机器学习的无人机物理攻击检测与恢复方法及装置
发明涉及信息安全,尤其涉及一种基于机器学习的无人机物理攻击检测与恢复方法。
背景技术:
1、无人系统利用多种不同类型的传感器监测当前物理环境和系统状态,在此基础上,控制器根据系统当前状态和目标状态产生相应的驱动信号来控制系统平稳运行。因此,无人系统是基于传感器运行的。无人系统传感器的安全性已成为一个首要的要求和挑战。目前,针对无人机的安全威胁主要是物理攻击,攻击者可以通过物理方式向传感器注入虚假的数据以修改实际的传感器测量值,这些错误的状态估计传输到控制系统后,控制器将产生错误的驱动信号和指令,这将导致无人机产生意想不到的后果,比如坠毁或撞击。常见的物理攻击有gps欺骗、通过噪声欺骗修改陀螺仪和加速度计的测量值、激光雷达欺骗攻击等等。
2、已有大量关于无人机系统安全问题的研究,但大多数研究只针对无人机攻击的检测而不是恢复。无人机越来越多的被应用在实际场景中,在检测到攻击后,无人机系统采取的措施一般是紧急制动或手动恢复,这样通常会导致无人机任务失败。因此,只检测攻击而不恢复攻击显然不是一个完整的解决方案。为了防御外部攻击,研究无人系统传感器攻击检测与恢复方法是很有必要的。
3、在文献“zhang j,pan l,han q l,et al.deep learning based attackdetection for cyber-physical system cybersecurity:a survey.ieee/caa journalof automatica sinica,2022.”中综合讨论了大量文献中机器学习在检测网络物理系统中的网络攻击、物理攻击的优异性能和发展潜力。文章总结和分析了一种六步机器学习驱动方法来检测网络物理系统的攻击:攻击场景分析、网络攻击识别、机器学习问题表述、机器学习模型定制、数据采集、结果评估。文章中展示了许多机器学习在网络攻击检测方面的表现优异的例子,并给出了五个有发展前景的研究方向。但文章没有分析机器学习在网络物理系统攻击恢复方面的应用,目前仅有少量关注网络物理系统的攻击恢复的研究,只检测到攻击而不考虑攻击恢复不是一个完整的解决方案。
4、文献“choi h,kate s,aafer y,et al.software-based realtime recoveryfrom sensor attacks on robotic vehicles.recent advances in intrusiondetection.2020.”是比较早关注到无人机传感器攻击恢复的文章。在该文章中构建了一种基于系统识别技术的状态空间预测模型,对无人机系统进行动力学建模,根据上一时刻的无人机状态和控制器输出值来预测下一时刻的系统状态。基于状态空间模型的传感器预测作为相应物理传感器的软件备份运行,持续监测预测模型和传感器真实值之间的差值,当差值超过预定义的阈值,则表示物理传感器受到了攻击,相应的软件传感器可以单独隔离和恢复被攻击的传感器,防止无人机的进一步损坏。但是,该方法仍存在不足:首先,该方法提出的构建状态空间模型需要具备关于无人机的系统动力学知识,这对许多无人机的新的研究者是一个很高的门槛。其次,状态空间模型可以描述线性系统上一时刻与下一时刻的关系,而无人机系统是复杂的物理系统,不是简单的线性系统。因此,该预测模型不能准确模拟系统状态。
5、文献“f.akowuah,r.prasad,c.o.espinoza and f.kong,recovery-by-learning:restoring autonomous cyber-physical systems from sensor attacks,2021ieee 27thinternational conference on embedded and real-time computing systems andapplications(rtcsa),2021”中提出使用一个状态预测器和一个数据检查指针来恢复物理网络系统中的传感器攻击。该攻击恢复架构使用一个双滑动窗口协议来保证状态预测器的输入只有正常飞行时传感器的数据,其中,日志窗口中包括已经通过攻击检测的、值得信任的一组数据,检测窗口中包括当前时刻的、未通过攻击检测的一组数据。当检测到传感器攻击时,使用缓存在日志窗口中的数据通过状态预测器预测未来时刻的传感器数据。该方法考虑了攻击检测延迟导致传感器数据不值得信任的问题,但在模拟环境下的验证实验中发现,该攻击恢复方法所需恢复时间长达20s,而攻击恢复时间越长,误差累积越大。在攻击恢复和自动接管控制期间,预测器的输入数据不会接受新的来自实际环境的反馈,比如外部干扰、传感器噪声,随着时间的推移,累计误差会越来越大,这将严重影响控制的精确度。
技术实现思路
1、本发明通过提供一种基于机器学习的无人机物理攻击检测与恢复方法,解决了现有技术在各类无人系统攻击检测时的局限性的问题,通过精准模拟无人系统的控制算法,实现了对攻击类型和恢复系统的普遍通用性,提高恢复精确度。
2、第一方面,本发明提供了一种基于机器学习的无人机物理攻击检测与恢复方法,该方法包括:
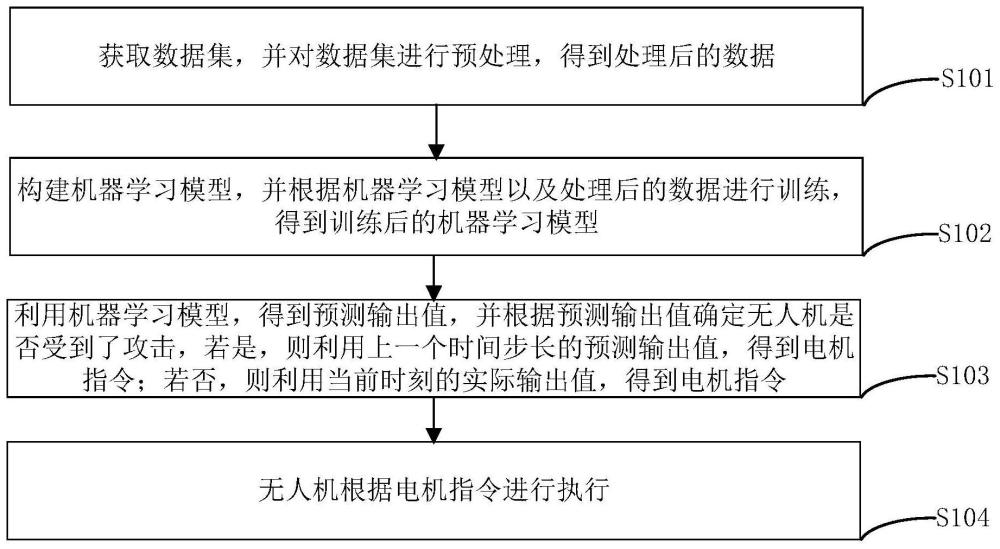
3、获取数据集,并对所述数据集进行预处理,得到处理后的数据;
4、构建机器学习模型,并根据所述机器学习模型以及所述处理后的数据进行训练,得到训练后的机器学习模型;
5、利用所述机器学习模型,得到预测输出值,并根据所述预测输出值确定无人机是否受到了攻击,若是,则利用上一个时间步长的所述预测输出值,得到电机指令;若否,则利用当前时刻的实际输出值,得到所述电机指令;
6、所述无人机根据所述电机指令进行执行。
7、结合第一方面,在一种可能的实现方式中,所述对所述数据集进行预处理,得到处理后的数据,具体包括:
8、利用异构传感器之间的冗余,不同传感器的数值的相关性对所述数据集进行特征选择,对选择后得到的特征进行升采样,得到升采样后的数据;
9、对所述升采样后的数据进行标准化,得到所述处理后的数据。
10、结合第一方面,在一种可能的实现方式中,所述根据所述机器学习模型以及所述处理后的数据进行训练,得到训练后的机器学习模型,具体包括:
11、获取所述处理后的数据中的包含当前时刻的上一时间步长内的当前姿态信息,目标姿态信息,陀螺仪测得的角速度以及绕待测轴的旋转角速率,并输入至所述机器学习模型中,得到模型输出值;
12、判断所述模型输出值是否满足预设约束条件;若满足则输出所述机器学习模型;若不满足,则修改所述机器学习模型中的参数,继续训练,直至所述模型输出值满足预设约束条件。
13、结合第一方面,在一种可能的实现方式中,所述机器学习模型,具体包括:绕x轴的旋转角速率预测器、绕y轴的旋转角速率预测器和绕z轴的旋转角速率预测器。
14、结合第一方面,在一种可能的实现方式中,所述利用所述机器学习模型,得到预测输出值,具体包括:
15、利用所述机器学习模型中的绕x轴的旋转角速率预测器、绕y轴的旋转角速率预测器和绕z轴的旋转角速率预测器,根据输入的包括当前时刻的上一时间步长的当前姿态信息,目标姿态信息,陀螺仪测得的角速度以及绕待测轴的旋转角速率,得到所述预测输出值。
16、结合第一方面,在一种可能的实现方式中,所述机器学习模型的预测输出值与输入的绕待测轴的旋转角速率对应。
17、结合第一方面,在一种可能的实现方式中,所述根据所述预测输出值确定无人机是否受到了攻击,具体包括:
18、在包括当前时刻的一个检测窗口内,计算所述预测输出值与所述实际输出值之间的误差;
19、若所述误差小于第一阈值,则确定所述无人机没有发生攻击,继续检测下一个检测窗口;
20、若所述误差大于或者等于所述第一阈值,则确定所述无人机发生攻击。
21、第二方面,本发明提供了一种基于机器学习的无人机物理攻击检测与恢复装置,该装置包括:
22、数据获取模块,用于获取数据集,并对所述数据集进行预处理,得到处理后的数据;
23、模型构建模块,用于构建机器学习模型,并根据所述机器学习模型以及所述处理后的数据进行训练,得到训练后的机器学习模型;
24、指令确定模块,用于将包括当前时刻的上一时间步长内的当前姿态信息,目标姿态信息,陀螺仪测得的角速度以及绕待测轴的旋转角速率输入至所述机器学习模型中,分别根据所述绕待测轴的旋转角速率,确定所述机器学习模型的所述输出值;
25、执行模块,用于所述无人机根据所述电机指令进行执行。
26、第三方面,本发明提供了一种基于机器学习的无人机物理攻击检测与恢复服务器,该服务器包括存储器和处理器;
27、所述存储器用于储存计算机可执行指令;
28、所述处理器用于执行所述计算机可执行指令,以实现基于机器学习的无人机物理攻击检测与恢复方法。
29、第四方面,本发明提供了一种计算机可读存储介质,所述计算机可读存储介质有可执行指令,计算机执行所述可执行指令时能够实现基于机器学习的无人机物理攻击检测与恢复方法。
30、本发明中提供的一个或多个技术方案,至少具有如下技术效果或优点:
31、(1)本发明通过待预测特征与其他特征之间的相关系数矩阵和异构传感器之间相互关联的特性来确定模型训练时的特征,既避免过多的特征导致模型运算慢效率低的问题,选择的特征又可以有效表达和预测控制器的输出值。
32、(2)本发明通过机器学习模型来恢复姿态控制器的输出,姿态控制器包括了对环境噪声、传感器噪声的预测和处理,因此,预测器能够基于历史数据对控制器输出值做更接近真实情况的预测,减少了随着时间推移而累积的环境噪声误差,相比于基于预测受损传感器数值的恢复方法,提高了模型的恢复精确度。
33、(3)本发明提出的机器学习是基于大量数据和算法来学习数据之间隐藏的规律,因此可以很好的模拟非线性系统,通过精准的模型构建,减小模型预测值与实际值之间的误差,能够更精准地设置检测阈值,降低了检测的假阴率和假阳率。
- 还没有人留言评论。精彩留言会获得点赞!