一种汽车零部件表面缺陷检测方法与流程
本发明涉及图像分析,具体涉及一种汽车零部件表面缺陷检测方法。
背景技术:
1、汽车作为一种交通工具,其零部件的质量和可靠性对行车安全和用户体验至关重要。因此对汽车零部件进行缺陷检测时十分重要的一个步骤。汽车零部件表面的划痕缺陷属于不易被检测出来的缺陷,并且会影响零部件的功能性、外观和使用寿命;所以需要对汽车零部件表面进行划痕缺陷检测,从而确保产品符合质量标准。
2、现有技术在对汽车的零部件表面进行划痕缺陷检测时,往往采用阈值分割的方法,但是由于零部件表面受到光照影响时,会导致图像中像素点灰度值分布复杂造成阈值分割结果不够准确,进而影响缺陷检测的准确度。
技术实现思路
1、为了解决现有技术采用阈值分割方法检测划痕缺陷,但由于受到光照影响,会导致像素点灰度值分布复杂,造成阈值分割结果不准确,进而影响缺陷检测的准确度的技术问题,本发明的目的在于提供一种汽车零部件表面缺陷检测方法,所采用的技术方案具体如下:
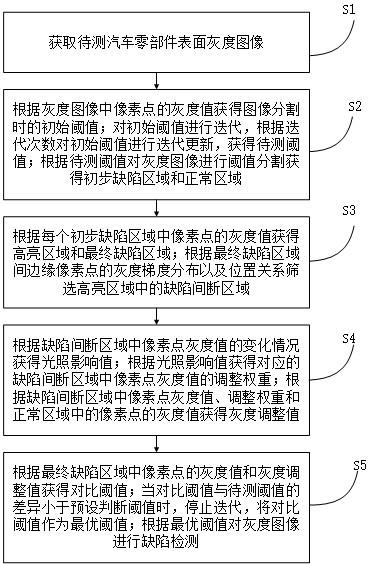
2、获取待测汽车零部件表面灰度图像;
3、根据灰度图像中像素点的灰度值获得图像分割时的初始阈值;对所述初始阈值进行迭代,根据迭代次数对所述初始阈值进行迭代更新,获得待测阈值;根据所述待测阈值对所述灰度图像进行阈值分割获得初步缺陷区域和正常区域;
4、根据每个所述初步缺陷区域中像素点的灰度值获得高亮区域和最终缺陷区域;根据最终缺陷区域间边缘像素点的灰度梯度分布以及位置关系筛选高亮区域中的缺陷间断区域;
5、根据所述缺陷间断区域中像素点灰度值的变化情况获得光照影响值;根据所述光照影响值获得对应的缺陷间断区域中像素点灰度值的调整权重;根据所述缺陷间断区域中像素点灰度值、调整权重和正常区域中的像素点的灰度值获得灰度调整值;
6、根据所述最终缺陷区域中像素点的灰度值和所述灰度调整值获得对比阈值;当所述对比阈值与所述待测阈值的差异小于预设判断阈值时,停止迭代,将所述对比阈值作为最优阈值;根据所述最优阈值对灰度图像进行缺陷检测。
7、进一步地,所述根据每个所述初步缺陷区域中像素点的灰度值获得高亮区域和最终缺陷区域,包括:
8、将每个所述初步缺陷区域中灰度值大于预设灰度值的像素点作为目标像素点;
9、将初步缺陷区域中所有目标像素点组成的区域作为目标区域,对所述目标区域进行区域生长,当生长过程中与所属初步缺陷区域的边缘有交点时,停止生长,将所述目标区域生长形成的区域作为所述高亮区域;
10、将所述初步缺陷区域中除高亮区域外的区域作为最终缺陷区域。
11、进一步地,所述根据最终缺陷区域间边缘像素点的灰度梯度分布以及位置关系筛选高亮区域中的缺陷间断区域,包括:
12、将每个所述最终缺陷区域中所有边缘像素点的灰度梯度的均值作为延伸方向;
13、获取每个最终缺陷区域的质心;将初步缺陷区域中高亮区域两侧的最终缺陷区域的质心之间的距离的值作为距离参数,将高亮区域两侧的最终缺陷区域的延伸方向之间的差异进行归一化并负相关映射后的值作为方向参数;
14、将所述距离参数和所述方向参数的乘积作为相似指标,当所述相似指标小于预设相似阈值时,则高亮区域为缺陷间断区域。
15、进一步地,所述根据所述缺陷间断区域中像素点灰度值的变化情况获得光照影响值,包括:
16、连接缺陷间断区域对应的两个最终缺陷区域的质心,获得光照变化方向,将缺陷间断区域在所述光照变化方向上的灰度值最大的像素点作为中心像素点;经过所述中心像素点作所述光照变化方向的垂线,将所述垂线上预设第一数量个像素点作为目标像素点,将过每个目标像素点在与所述光照变化方向平行的直线上的预设第二数量个像素点作为待测像素点;
17、将每个目标像素点对应的待测像素点的灰度值进行正态拟合,获得灰度拟合值;将每个目标像素点的每个待测像素点的灰度值与对应的灰度拟合值的差异进行负相关映射,作为灰度差异值,将每个目标像素点对应的所有待测像素点的灰度差异值累加作为灰度特征值;
18、将所有目标像素点的灰度特征值累加后的均值作为所述光照影响值。
19、进一步地,所述调整权重的获取方法包括:
20、将每个缺陷间断区域对应的光照影响值的进行负相关映射后的值作为缺陷间断区域中像素点灰度值的调整权重。
21、进一步地,所述灰度调整值的获取方法包括:
22、将所有缺陷间断区域中的像素点个数与所述正常区域中所有像素点个数的和值作为个数和值;
23、将每个缺陷间断区域中的所有像素点的灰度值与对应的调整权重相乘后累加,作为区域灰度和值,将所有缺陷间断区域的区域灰度和值累加后的值作为间断区域灰度值;
24、将正常区域中所有像素点的灰度值的和值作为正常区域灰度值;将所述正常区域灰度值和所述间断区域灰度值的和值与所述个数和值的比值作为所述灰度调整值。
25、进一步地,所述根据所述最终缺陷区域中像素点的灰度值和所述灰度调整值获得对比阈值,包括:
26、将所述最终缺陷区域中所有像素点的灰度值的均值作为前景灰度值;
27、将所述前景灰度值与所述灰度调整值的均值作为所述对比阈值。
28、进一步地,所述初始阈值的获取方法包括:
29、将所述灰度图像中像素点的最大灰度值和最小灰度值的均值作为基准阈值;
30、将所述基准阈值与预设常数相加后的值作为所述初始阈值。
31、进一步地,所述对所述初始阈值进行迭代,根据迭代次数对所述初始阈值进行迭代更新,获得待测阈值,包括:
32、将每次迭代的次数与所述初始阈值相加后的值作为每次迭代过程的待测阈值。
33、进一步地,所述根据所述最优阈值对灰度图像进行缺陷检测,包括:
34、基于所述最优阈值对所述灰度图像进行阈值分割,获取前景区域;将所述前景区域在所述灰度图像中的对应区域作为缺陷区域。
35、本发明具有如下有益效果:
36、本发明目的在于得到汽车零部件表面灰度图像分割时的最优阈值,从而提高缺陷检测的精度;因此,首先获取到汽车零部件表面的灰度图像,然后对灰度图像进行分析;根据灰度图像中像素点的灰度值确定一个初始阈值,然后通过迭代遍历,基于初始阈值以及迭代次数获得每次迭代过程中的阈值,并将其作为待测阈值;进而通过对待测阈值下分割的图像进行分析,分割的图像可分为初步缺陷区域和正常区域;但是由于受到光照的影响,所以会产生反光现象,造成像素点灰度值分布复杂,进而灰度图像中出现的高亮区域会被分割至初步缺陷区域中,而高亮区域可能并不是缺陷区域,所以需要对其进行进一步的分析:若高亮区域也为划痕缺陷区域,那么高亮区域两侧的最终缺陷区域应走向一致并且距离较近,所以可以基于最终缺陷区域的边缘像素点的灰度梯度的分布以及位置关系筛选为缺陷间断区域的高亮区域;然后分析光照产生的影响:光照会导致像素点的灰度值发生变化,因此基于缺陷间断区域中像素点的灰度值的变化情况获得光照影响值,进而依据光照影响值对缺陷间断区域中像素点的灰度值进行调整修正并结合正常区域中的像素点的灰度值获得灰度调整值;此时灰度调整值综合了光照影响的信息,因此也会更加的准确,故根据最终缺陷区域中像素点的灰度值以及灰度调整值获得对比阈值;然后通过将对比阈值与待测阈值进行比较,若符合判断条件,则停止迭代,将对比阈值作为最优阈值对灰度图像进行缺陷检测。综上,本发明通过对光照影响产生的高亮或反光区域进行进一步的分析,从而能够更加准确的判断其是否为缺陷区域,从而获取最优阈值,提高分割结果的准确度,同时有效提高缺陷检测的精度。
- 还没有人留言评论。精彩留言会获得点赞!