变电站禁区闯入监测方法、系统及电子设备与流程
本发明涉及模式识别,尤其是涉及一种变电站禁区闯入监测方法、系统及电子设备。
背景技术:
1、高压带电区域、建筑施工区域、设备检修区域等作为变电站中重要的职能区域,同时也是变电站中危险的活动区域。如果没能及时发现外来人员、动物(例如狗、猫等等)闯入,不仅有可能损坏变电站设备设施,影响变电站正常运行,而且有可能威胁着外来人员、动物的生命安全。因此,能够快速地发现变电站禁区闯入行为,及时驱离外来闯入,消除安全隐患,变得至关重要。
2、现有技术的变电站禁区闯入监测方法通常使用传统学习监测方法来解决,例如帧间差分法、背景差分法、光流场法等等,但这些对于背景复杂、光线变化等客观因素,其运动目标就很难准确地从背景中分离出来。现有技术还使用深度学习监测方法来实现变电站禁区闯入监测,例如yolov5、yolov6、yolov7、yolof、yolox、ppyoloe等等,这些虽然对背景复杂、光线变化等有一定的抗干扰能力,可以较好检测出运动目标,但无法更好地度量禁区闯入行为,时常出现误报、漏报的情况。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种变电站禁区闯入监测方法、系统及电子设备,该方案利用计算运动目标与变电站禁区之间的配准值来进行闯入监测,通过设置禁区确定区域和禁区敏感区域来区分监测等级;该方法利用运动目标与禁区敏感区域之间的第一配准值对禁区闯入过程进行定性分析,并利用运动目标与禁区敏感区域之间的第二配准值、运动目标与禁区确定区域之间的第三配准值对禁区闯入过程进行定量分析,在提升禁区闯入监测速度的同时也提高了监测精度,解决了现有技术中存在的监测精度较低的问题。
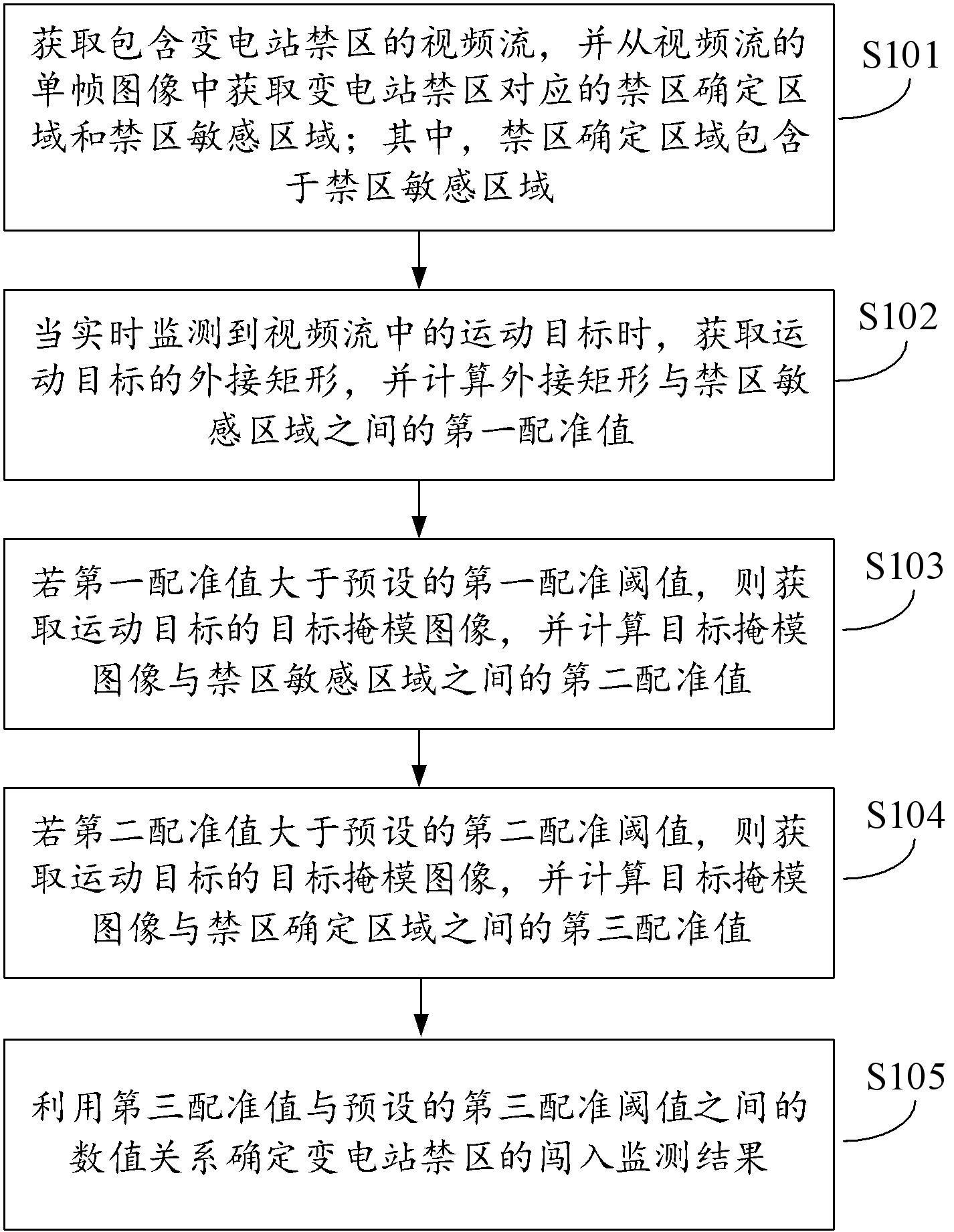
2、第一方面,本发明实施方式提供了一种变电站禁区闯入监测方法,该方法包括:
3、获取包含变电站禁区的视频流,并从视频流的单帧图像中获取变电站禁区对应的禁区确定区域和禁区敏感区域;其中,禁区确定区域包含于禁区敏感区域;
4、当实时监测到视频流中的运动目标时,获取运动目标的外接矩形,并计算外接矩形与禁区敏感区域之间的第一配准值;
5、若第一配准值大于预设的第一配准阈值,则获取运动目标的目标掩模图像,并计算目标掩模图像与禁区敏感区域之间的第二配准值;
6、若第二配准值大于预设的第二配准阈值,则获取运动目标的目标掩模图像,并计算目标掩模图像与禁区确定区域之间的第三配准值;
7、利用第三配准值与预设的第三配准阈值之间的数值关系确定变电站禁区的闯入监测结果。
8、在一种实施方式中,获取包含变电站禁区的视频流,并从视频流的单帧图像中获取变电站禁区对应的禁区确定区域和禁区敏感区域的步骤,包括:
9、利用变电站中预设的视频摄录装置获取视频流;其中,在视频摄录装置的成像范围内至少包含一个配电箱;
10、将视频流的首帧图像中包含配电箱的地面区域确定为禁区确定区域;
11、将包含禁区确定区域且不包含道路的地面区域确定为禁区敏感区域。
12、在一种实施方式中,将包含禁区确定区域且不包含道路的地面区域确定为禁区敏感区域的步骤之后,该方法还包括:
13、获取禁区确定区域和禁区敏感区域对应的坐标参数;
14、将坐标参数与视频摄录装置的型号数据保存至预设的配置文件中;其中,配置文件用于计算第一配准值、第二配准值以及第三配准值。
15、在一种实施方式中,当实时监测到视频流中的运动目标时,获取运动目标的外接矩形,并计算外接矩形与禁区敏感区域之间的第一配准值的步骤,包括:
16、将单帧图像输入至已完成训练的实例分割网络中,获取实例分割网络生成的单帧图像对应的光流对齐特征图,并对光流对齐特征图进行级联计算,根据级联计算结果实时监测单帧图像中的运动目标;
17、当监测到视频流中包含运动目标后获取运动目标的外接矩形,并利用禁区敏感区域包含的各边确定禁区敏感区域的区域多边形;
18、计算外接矩形与区域多边形之间的第一变异交并比值,并将第一变异交并比值确定为第一配准值。
19、在一种实施方式中,将单帧图像输入至已完成训练的实例分割网络中,获取实例分割网络生成的单帧图像对应的光流对齐特征图,并对光流对齐特征图进行级联计算,根据级联计算结果实时监测单帧图像中的运动目标的步骤,包括:
20、将单帧图像依次发送至实例分割网络中预设的第一卷积层、第二卷积层和第三卷积层中,并分别获取对应的第一特征图f3、第二特征图f4和第三特征图f5;
21、将第一特征图f3、第二特征图f4和第三特征图f5输入至已完成训练的特征金字塔网络中,利用特征金字塔网络中的光流对齐单元得到第三特征图f5与第二特征图f4之间对应的第二光流对齐特征图faf4;
22、将第二光流对齐特征图faf4与第二特征图f4进行级联融合,得到第二特征图f4对应的第二融合特征图p4,并利用特征金字塔网络中的光流对齐单元得到第二融合特征图p4与第一特征图f3之间的第一光流对齐特征图faf3;
23、将第一光流对齐特征图faf3与第一特征图f3进行级联融合,得到第一特征图f3对应的第一融合特征图p3;对第一融合特征图p3进行卷积运算生成第二卷积特征图paf4;
24、将第二卷积特征图paf4与第二融合特征图p4进行级联融合后更新第二融合特征图p4,对第二融合特征图p4进行卷积运算生成第三卷积特征图paf5;
25、将第三卷积特征图paf5与第三特征图f5进行级联融合生成第三融合特征图p5,并将利用第三融合特征、第二融合特征图和第一融合特征图实时监测单帧图像中的运动目标。
26、在一种实施方式中,若第一配准值大于预设的第一配准阈值,则获取运动目标的目标掩模图像,并计算目标掩模图像与禁区敏感区域之间的第二配准值的步骤,包括:
27、将第一配准值与预设的第一配准阈值进行对比;
28、若第一配准值大于第一配准阈值,则利用运动目标的外接矩形确定运动目标的目标掩模图像,并利用禁区敏感区域的区域多边形确定禁区敏感区域的敏感区域掩模图像;
29、计算目标掩模图像与敏感区域掩模图像之间的第二变异交并比值,并将第二变异交并比值确定为第二配准值。
30、在一种实施方式中,若第二配准值大于预设的第二配准阈值,则获取运动目标的目标掩模图像,并计算目标掩模图像与禁区确定区域之间的第三配准值的步骤,包括:
31、将第二配准值与预设的第二配准阈值进行对比;
32、若第二配准值大于第二配准阈值,则利用运动目标的外接矩形确定运动目标的目标掩模图像,并利用禁区确定区域的区域多边形确定禁区确定区域的确定区域掩模图像;
33、计算目标掩模图像与确定区域掩模图像之间的第三变异交并比值,并将第三变异交并比值确定为第三配准值。
34、在一种实施方式中,利用第三配准值与预设的第三配准阈值之间的数值关系确定变电站禁区的闯入监测结果的步骤,包括:
35、若第三配准值不大于预设的第三配准阈值,则利用当前运动目标的坐标参数、时间参数以及第二配准值确定变电站禁区对应的第一监测结果;
36、若第三配准值大于第三配准阈值,则利用当前运动目标的坐标参数、时间参数以及第三配准值确定变电站禁区对应的第二监测结果。
37、第二方面,本发明实施方式提供一种变电站禁区闯入监测系统,该系统包括:
38、监测数据获取模块,用于获取包含变电站禁区的视频流,并从视频流的单帧图像中获取变电站禁区对应的禁区确定区域和禁区敏感区域;其中,禁区确定区域包含于禁区敏感区域;
39、第一配准值计算模块,用于当实时监测到视频流中的运动目标时,获取运动目标的外接矩形,并计算外接矩形与禁区敏感区域之间的第一配准值;
40、第二配准值计算模块,用于若第一配准值大于预设的第一配准阈值,则获取运动目标的目标掩模图像,并计算目标掩模图像与禁区敏感区域之间的第二配准值;
41、第三配准值计算模块,用于若第二配准值大于预设的第二配准阈值,则获取运动目标的目标掩模图像,并计算目标掩模图像与禁区确定区域之间的第三配准值;
42、监测结果确定模块,用于利用第三配准值与预设的第三配准阈值之间的数值关系确定变电站禁区的闯入监测结果。
43、第三方面,本发明实施方式还提供一种电子设备,包括处理器和存储器,存储器存储有能够被处理器执行的计算机可执行指令,处理器执行计算机可执行指令以实现第一方面提供的变电站禁区闯入监测方法的步骤。
44、第四方面,本发明实施方式还提供一种存储介质,存储介质存储有计算机可执行指令,计算机可执行指令在被处理器调用和执行时,计算机可执行指令促使处理器实现第一方面提供的变电站禁区闯入监测方法的步骤。
45、本发明实施方式提供的一种变电站禁区闯入监测方法、系统及电子设备,在对变电站禁区进行闯入监测的过程中,首先获取包含变电站禁区的视频流,并从视频流的单帧图像中获取变电站禁区对应的禁区确定区域和禁区敏感区域;其中,禁区确定区域包含于禁区敏感区域;当实时监测到视频流中的运动目标时,获取运动目标的外接矩形,并计算外接矩形与禁区敏感区域之间的第一配准值;若第一配准值大于预设的第一配准阈值,则获取运动目标的目标掩模图像,并计算目标掩模图像与禁区敏感区域之间的第二配准值;第二配准值获取后对其大小进行判断,若第二配准值大于预设的第二配准阈值,则获取运动目标的目标掩模图像,并计算目标掩模图像与禁区确定区域之间的第三配准值;第三配准值获取后对其大小进行判断,利用第三配准值与预设的第三配准阈值之间的数值关系确定变电站禁区的闯入监测结果。该方案利用计算运动目标与变电站禁区之间的配准值来进行闯入监测,通过设置禁区确定区域和禁区敏感区域来区分监测等级;该方法利用运动目标与禁区敏感区域之间的第一配准值对禁区闯入过程进行定性分析,并利用运动目标与禁区敏感区域之间的第二配准值、运动目标与禁区确定区域之间的第三配准值对禁区闯入过程进行定量分析,在提升禁区闯入监测速度的同时也提高了监测精度,解决了现有技术中存在的监测精度较低的问题。
46、本发明的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
47、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!