一种网壳钢结构预拼装方法、系统、装置及存储介质与流程
本技术涉及建筑施工,尤其是涉及一种网壳钢结构预拼装方法、系统、装置及存储介质。
背景技术:
1、网壳钢结构是将杆件沿着某个曲面有规律地布置而形成的空间结构体系,其受力特点与薄壳结构类似,即大部分荷载由网壳杆件的轴向力承受。在实际使用时,需要先生产各种类型、规格的杆件和米字型节点,再通过米字型节点将离散的杆件拼装成网壳状。制造商为了增强网壳结构的强度,常采用钢材料来制作杆件和米字型节点,钢材料制成的杆件和米字型节点统称为钢结构。
2、当前,制造商普遍采用钢尺、拉线、放样吊线和检验模板等传统方法来校验生产的钢结构是否符合设计要求,然而针对大型的网壳结构,涉及的钢结构不仅数量多、单个钢结构的重量大,所以在校验钢结构时需要耗费大量的人力,校验效率低。对于复杂的网壳结构,还要通过实物预拼装,检验钢结构的空间位置,减小累积误差,而这种校验方式不仅需要空旷的大拼装场地,而且拼装过程也需要人力参与,检测过程繁琐,校验时间长,检测成本高,而且校验的精度会根据人工经验不同或者场地地面平整度的不同而存在差异,即校验的精度得不到保障,无法满足当前的钢结构的加工制造技术需求。
技术实现思路
1、为了解决当前的钢结构校验准确度低的问题,本技术提供一种网壳钢结构预拼装方法、系统、装置及存储介质。
2、在本技术的第一方面,提供了一种网壳钢结构预拼装方法。该方法包括:
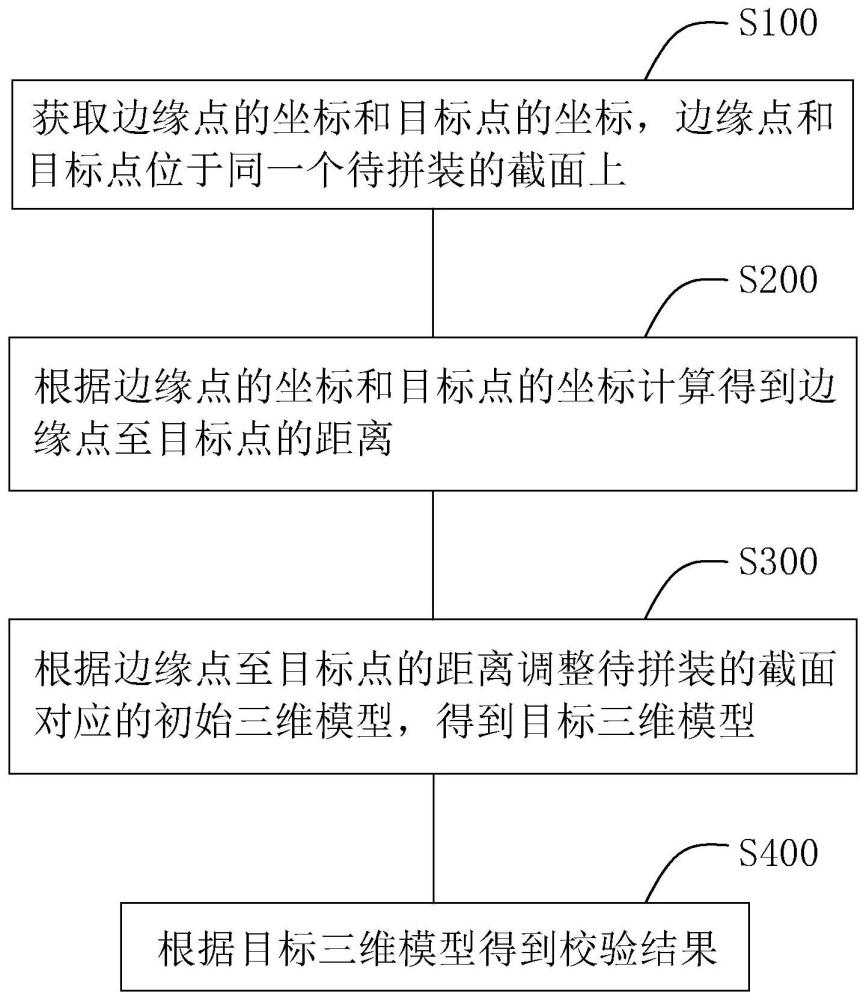
3、获取边缘点的坐标和目标点的坐标,所述边缘点和所述目标点位于同一个待拼装的截面上;根据所述边缘点的坐标和所述目标点的坐标计算得到边缘点至目标点的距离;
4、根据所述距离调整所述待拼装的截面对应的初始三维模型,得到目标三维模型;
5、根据所述目标三维模型得到校验结果。
6、通过采用上述技术方案,首先,获取待拼装的截面上的边缘点的坐标和目标点的坐标。然后,将目标点作为参考点,计算边缘点至目标点的距离,再根据该距离调整待拼装的截面对应的虚拟的初始三维模型,使得初始三维模型朝向与待拼装的截面的实物相同的方向调整,得到与实物的待拼装截面相同的目标三维模型后,采用目标三维模型代替实物的待拼装的截面进行拼装,以保障拼装的准确度,提高所得的校验结果的准确度。
7、在一种可能的实现方式中:所述边缘点的数量有多个;
8、所述根据所述边缘点的坐标和所述目标点的坐标计算得到边缘点至目标点的距离,包括:根据所述目标点位于所述待拼装的截面上的位置确定起始点和处理顺序;
9、以所述起始点为起点,按照所述处理顺序分别计算每一个所述边缘点的坐标与所述目标点的坐标的距离。
10、通过采用上述技术方案,边缘点的数量设置有多个,并分别计算每一个边缘点至目标点的距离,从而使得在后续调整待拼装的截面的初始三维模型时,通过多个距离来提高所得的目标三维模型与实物的待拼装的截面的相似度,进而为得到准确的校验结果提供数据支持。
11、在一种可能的实现方式中:所述根据所述目标点位于所述待拼装的截面上的位置确定起始点和处理顺序,包括:
12、当所述目标点为所述多个边缘点中的其中一个边缘点时,以与所述目标点相邻的其中一个边缘点作为起始点,并根据所述起始点与所述目标点的相对位置确定处理顺序。
13、通过采用上述技术方案,存在多个边缘点时,先从边缘点中确定出起始点,同时确定处理顺序,最后再以起始点为起点,按照处理顺序分别计算每一个边缘点的坐标与目标点的坐标的距离,以使得有顺序的遍历待拼装截面中的每一个边缘点的目的,从而降低出现计算混乱、距离管理混乱的问题出现。
14、在一种可能的实现方式中:所述相对位置包括左侧和右侧,所述左侧对应逆时针的处理顺序,所述右侧对应顺时针的处理顺序;
15、所述根据所述起始点与所述目标点的相对位置确定处理顺序,包括:
16、当所述起始点位于所述目标点的左侧时,选择逆时针的处理顺序;
17、当所述起始点位于所述目标点的右侧时,选择顺时针的处理顺序。
18、通过采用上述技术方案,当目标点为多个边缘点中的其中一个边缘点时,若起始点位于目标点的左侧,则选择逆时针的处理顺序;若起始点位于目标点的右侧,则选择顺时针的处理顺序,从而防止在遍历待拼装截面中的每一个边缘点时,出现目标点的坐标与目标点的坐标相减的情况出现。而当出现目标点的坐标减目标点的坐标时,不仅会增加本技术的计算量,而且计算所得的距离为0,0是无效的距离,所以本技术防止出现目标点的坐标减去目标点的坐标是为了提高计算效率,减少距离数据的冗余。
19、在一种可能的实现方式中:所述根据所述目标点位于所述待拼装的截面上的位置确定起始点和处理顺序,包括:
20、当所述目标点不是所述边缘点时,以距离所述目标点最近或者最远的一个边缘点作为所述起始点,并随机选择一个所述处理顺序。
21、通过采用上述技术方案,当目标点不是边缘点时,在遍历待拼装截面中的每一个边缘点时,也就不会出现目标点的坐标与目标点的坐标相减的情况,所以可以任意选择一种处理顺序。而以距离目标点最近或者最远的一个边缘点作为起始点,是为了更快地选择出一个起始点,以提高计算边缘点至目标点的距离的效率。
22、在一种可能的实现方式中:所述边缘点的数量有多个;
23、所述根据所述距离调整所述待拼装的截面对应的初始三维模型,包括:
24、计算所述多个边缘点中的每一个边缘点至目标点的距离,得到队列a1;
25、调取预设的队列a0,所述队列a0由多个距离按照预设顺序排列而成,所述队列a0中包含的多个距离反映所述待拼装的截面对应的初始三维模型;
26、对比队列a0和a1中相同排序的距离;
27、当相同排序的距离大小相等时,保留队列a0中所述相同排序的距离;
28、当相同排序的距离大小不相等时,将队列a0中所述相同排序的距离修改为队列a1中所述相同排序的距离。
29、通过采用上述技术方案,在调整待拼装的截面对应的初始三维模型时,依次对比队列a0和a1中相同排序的距离,当相同排序的距离大小相等时,保留队列a0中相同排序的距离;而当相同排序的距离大小不相等时,将队列a0中相同排序的距离修改为队列a1中所述相同排序的距离。如此设计,一方面能够提高所得的目标三维模型与实物的待拼装的截面的相似度,进而为得到准确的校验结果提供数据支持。另一方面,通过依次对比队列a0和a1中相同排序的距离,并对应调整a0中的距离,能够有序地调整初始三维模型,提高得到目标三维模型的效率。
30、在一种可能的实现方式中:所述获取边缘点的坐标和目标点的坐标之前,所述方法还包括:
31、当所述待拼装的截面为圆形时,以所述待拼装的截面的圆心作为目标点;
32、当所述待拼装的截面为非圆形时,以距离基准点最远的点作为目标点,所述基准点为钢结构的轴心线在基准面上的点,所述基准面与所述待拼装的截面位于所述钢结构上且分别位于所述钢结构的两端;
33、否则,随机选择一个边缘点作为所述目标点。
34、通过采用上述技术方案,本技术提供多种用于确定目标点的方法,使得制造商可以根据需要选择一种来确定出目标点,提高本技术的方法的环境适应能力。另外,本技术以目标点作为参考点,分别计算边缘点到目标点的距离,所以需要根据待拼装的截面的形状选择出目标点,以此来保障计算所得的距离的准确度,从而使调整的初始三维模型不断朝向与实物的待拼装的截面的相同的方向调整提供数据支持。
35、在本技术的第二方面,提供了一种网壳钢结构预拼装系统。该系统包括:
36、数据确定模块,用于获取边缘点的坐标和目标点的坐标,所述边缘点和所述目标点位于同一个待拼装的截面上;
37、数据计算模块,用于根据所述边缘点的坐标和所述目标点的坐标计算得到边缘点至目标点的距离:
38、数据处理模块,用于根据所述距离调整所述待拼装的截面对应的初始三维模型,得到目标三维模型;
39、数据生成模块,用于根据所述目标三维模型得到校验结果。
40、在本技术的第三方面,提供了一种网壳钢结构预拼装装置。该装置包括:存储器和处理器,所述存储器上存储有计算机程序,所述处理器执行所述程序时实现上述任一种网壳钢结构预拼装方法。
41、在本技术的第四方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现上述任一种网壳钢结构预拼装方法。
42、综上所述,本技术包括以下至少一种有益技术效果:
43、本技术的边缘点设置有多个,并分别计算每一个边缘点至目标点的距离,从而使得在调整待拼装的截面的初始三维模型时,通过多个距离来提高所得的目标三维模型与实物的待拼装的截面的相似度,得到与实物的待拼装截面相同的目标三维模型后,采用目标三维模型代替实物的待拼装的截面进行拼装,以保障拼装的准确度,提高所得的校验结果的准确度。
- 还没有人留言评论。精彩留言会获得点赞!