一种零件拓扑优化方法及系统
本发明涉及拓扑优化,特别涉及一种零件拓扑优化方法及系统。
背景技术:
1、结构拓扑优化是在指定的设计区域内,给定荷载和位移边界条件,在一定的设计约束条件下,通过自动去除设计领域中低效的材料,为最优轻量级设计提供了一种实用的方法。使用拓扑优化方法,可以使设计人员摆脱经验设计从而更容易开发出新颖的、特殊的结构形式。
2、simp 法创造性的将优化问题转变为材料的最优分布问题,极大简化了问题求解的复杂性,因其具有较高的计算效率和稳定性已成为当前发展相对成熟且应用最广的拓扑优化技术。
3、凸轮传动的蝎形变形机器人是基于仿生机器人原理制造的机器人。凸轮传动的蝎形变形机器人主要仿生蛛形纲蝎目生物(统称蝎子)的身体结构,运动形态,来设计我们的机械结构。
4、在现实中凸轮传动的蝎形变形机器人由于质量较大,材料利用率较低会导致在市场中竞争处于劣势。如何在不改变使用性能下减轻重量,提高材料利用率成为一个新的挑战。
技术实现思路
1、针对现有技术的不足,本发明的目的在于提供一种零件拓扑优化方法及系统,旨在解决现有技术中,材料利用率低的技术问题。
2、为了实现上述目的,本发明是通过如下技术方案来实现的:一种零件拓扑优化方法,包括以下步骤:
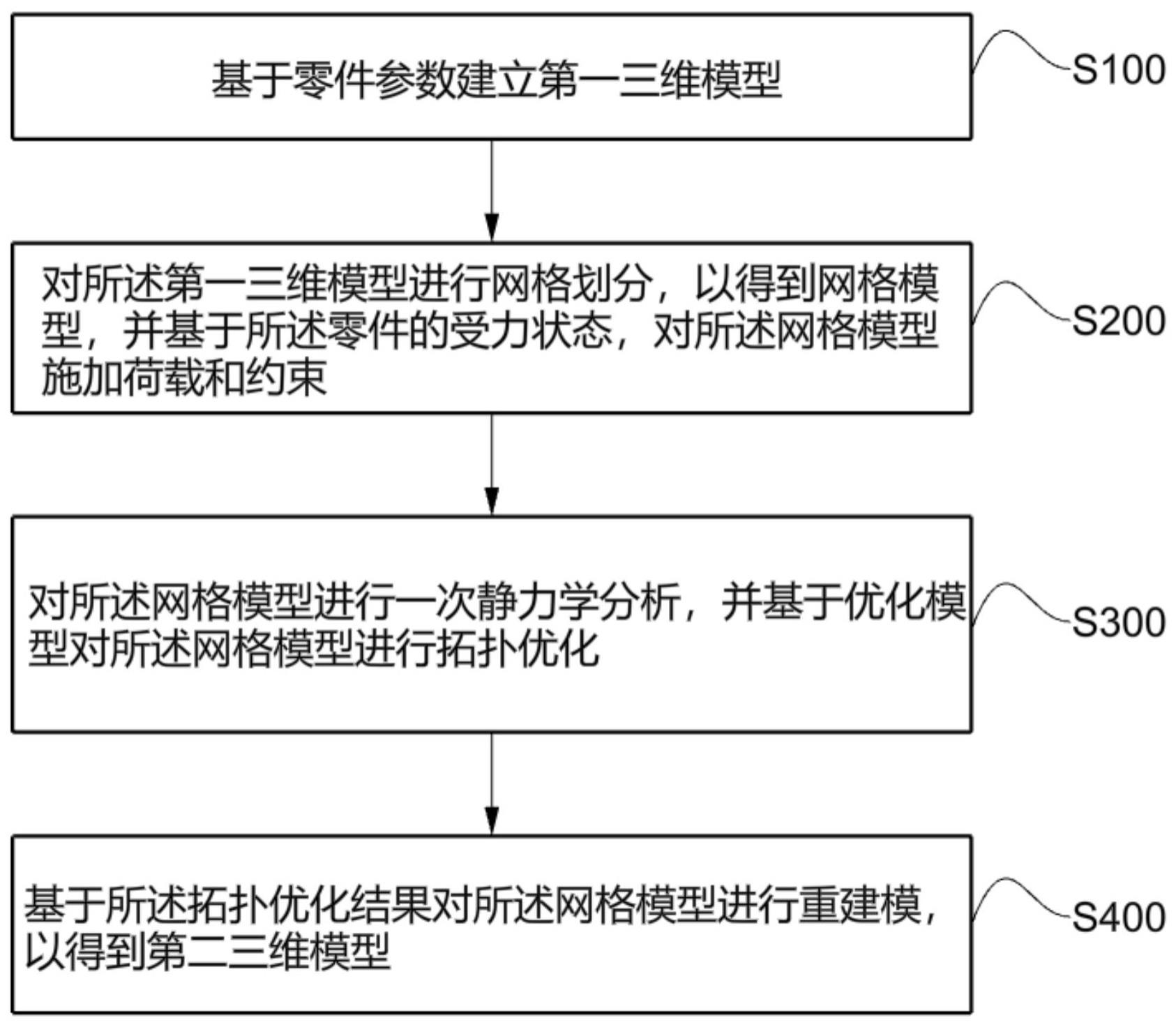
3、基于零件参数建立第一三维模型;
4、对所述第一三维模型进行网格划分,以得到网格模型,并基于所述零件的受力状态,对所述网格模型施加荷载和约束;
5、对所述网格模型进行一次静力学分析,并基于以下优化模型对所述网格模型进行拓扑优化:
6、;
7、;
8、;
9、式中,,分别是材料体积约束函数和最小尺寸约束函数,d是设计变量向量,是所述设计变量向量d所属于的集合;
10、基于所述拓扑优化结果对所述网格模型进行重建模,以得到第二三维模型。
11、根据上述技术方案的一方面,基于以下优化模型对所述网格模型进行拓扑优化的步骤具体包括:
12、基于以下优化模型求解最小尺寸约束下的柔度最小化的优化问题:
13、;
14、
15、;
16、;
17、;
18、;
19、;
20、式中,r表示设计区域,j为结构最小柔度,f,u,t,ε分别为实体材料的体积密度、实际位移、纽曼边界上的面力和二阶线性应变张量,v为实体材料的单位体积,d为积分符号,q为整数,为狄利克雷边界上规定的位移,表示试探位移场,表示heaviside函数,表示整体组件的拓扑描述函数集;e表示各向同性的弹性模量,为实体材料的体积的约束上限值,表示距离约束函数,表示最大位移量,表示最小位移。
21、根据上述技术方案的一方面,所述试探位移场的计算表达式为:
22、;
23、式中,表示在设计区域内的每一个节点,表示狄利克雷边界上的坐标点。
24、根据上述技术方案的一方面,所述弹性模量的计算表达式为:
25、;
26、式中,上标s表示单位节点,p为实体材料的泊松比,和分别为四阶单位张量和二阶单位张量,为函数和函数的卷积。
27、根据上述技术方案的一方面,基于所述拓扑优化结果对所述网格模型进行重建模,以得到第二三维模型的步骤之后,所述方法还包括:
28、对所述第二三维模型进行二次静力学分析,并将分析结果与所述一次静力学分析的结果进行比对,若差值满足预设范围则优化有效。
29、根据上述技术方案的一方面,所述一次静力学分析或所述二次静力学分析的步骤具体包括:
30、基于以下动力学方程,分析零件在固定载荷作用下的结构响应:
31、;
32、式中,[m]为系统质量矩阵,[c]为系统阻尼矩阵,[k]为系统刚度矩阵;f为外力,、和u分别表示系统加速度、速度及位移。
33、另一方面,本发明还提供了一种零件拓扑优化系统,包括:
34、第一建模模块,用于基于零件参数建立第一三维模型;
35、约束模块,用于对所述第一三维模型进行网格划分,以得到网格模型,并基于所述零件的受力状态,对所述网格模型施加荷载和约束;
36、优化模块,用于对所述网格模型进行一次静力学分析,并基于以下优化模型对所述网格模型进行拓扑优化:
37、;
38、;
39、;
40、式中,,分别是材料体积约束函数和最小尺寸约束函数,d是设计变量向量,是所述设计变量向量d所属于的集合;
41、第二建模模块,用于基于所述拓扑优化结果对所述网格模型进行重建模,以得到第二三维模型。
42、根据上述技术方案的一方面,所述优化模块具体用于:
43、基于以下优化模型求解最小尺寸约束下的柔度最小化的优化问题:
44、;
45、
46、;
47、;
48、;
49、;
50、;
51、式中,r表示设计区域,j为结构最小柔度,f,u,t,ε分别为实体材料的体积密度、实际位移、纽曼边界上的面力和二阶线性应变张量,v为实体材料的单位体积,d为积分符号,q为整数,为狄利克雷边界上规定的位移,表示试探位移场,表示heaviside函数,表示整体组件的拓扑描述函数集;e表示各向同性的弹性模量,为实体材料的体积的约束上限值,表示距离约束函数,表示最大位移量,表示最小位移。
52、根据上述技术方案的一方面,所述零件拓扑优化系统还包括:
53、分析模块,用于对所述第二三维模型进行二次静力学分析,并将分析结果与所述一次静力学分析的结果进行比对,若差值满足预设范围则优化有效。
54、根据上述技术方案的一方面,所述优化模块或所述分析模块还用于:
55、基于以下动力学方程,分析零件在固定载荷作用下的结构响应:
56、;
57、式中,[m]为系统质量矩阵,[c]为系统阻尼矩阵,[k]为系统刚度矩阵;f为外力,、和u分别表示系统加速度、速度及位移。
58、与现有技术相比,本发明的有益效果在于:通过基于零件参数建立第一三维模型,并对第一三维模型进行网格划分,及施加荷载和约束,并通过优化模型对模型进行拓扑优化,得到优化后的第二三维模型,确保材料受力性能的前提下,很大程度上减少成本和减少材料浪费,从而提高材料利用率。
技术特征:
1.一种零件拓扑优化方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的零件拓扑优化方法,其特征在于,基于以下优化模型对所述网格模型进行拓扑优化的步骤具体包括:
3.根据权利要求2所述的零件拓扑优化方法,其特征在于,所述试探位移场的计算表达式为:
4.根据权利要求2所述的零件拓扑优化方法,其特征在于,所述弹性模量的计算表达式为:
5.根据权利要求1所述的零件拓扑优化方法,其特征在于,基于所述拓扑优化结果对所述网格模型进行重建模,以得到第二三维模型的步骤之后,所述方法还包括:
6.根据权利要求5所述的零件拓扑优化方法,其特征在于,所述一次静力学分析或所述二次静力学分析的步骤具体包括:
7.一种零件拓扑优化系统,其特征在于,包括:
8.根据权利要求7所述的零件拓扑优化系统,其特征在于,所述优化模块具体用于:
9.根据权利要求7所述的零件拓扑优化系统,其特征在于,所述零件拓扑优化系统还包括:
10.根据权利要求9所述的零件拓扑优化系统,其特征在于,所述优化模块或所述分析模块还用于:
技术总结
本发明提供一种零件拓扑优化方法及系统,该方法包括以下步骤:基于零件参数建立第一三维模型;对所述第一三维模型进行网格划分,以得到网格模型,并基于所述零件的受力状态,对所述网格模型施加荷载和约束;对所述网格模型进行一次静力学分析,并基于优化模型对所述网格模型进行拓扑优化:基于所述拓扑优化结果对所述网格模型进行重建模,以得到第二三维模型。通过基于零件参数建立第一三维模型,并对第一三维模型进行网格划分,及施加荷载和约束,并通过优化模型对模型进行拓扑优化,得到优化后的第二三维模型,确保材料受力性能的前提下,很大程度上减少成本和减少材料浪费,从而提高材料利用率。
技术研发人员:吴俊慷,丁赫武,梁炯墙,周城林
受保护的技术使用者:江西应用科技学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!