一种结合树顶树干检测与林木模型的机载点云分割方法
本发明属于机载点云分割,尤其涉及一种结合树顶树干检测与林木模型的机载点云分割方法。
背景技术:
1、森林是地球上最重要的生态系统之一,在碳汇、维持生物多样性、储备水资源及维护生态平衡方面发挥着不可替代的作用。
2、传统的森林资源调查方法涉及科学抽样,在精确度和可执行性方面表现出色,被各国政府广泛采用,但无法忽视的是其在时间劳力方面的巨大消耗,以及对环境的破坏。现代机载激光雷达技术(airborne laser scanning,als)能够从机理上避免这些问题,符合现代生产的需要,因此在森林资源调查领域得到了广泛的应用。
3、als提供贯穿林木冠层至地表的垂直结构信息,在提取林木参数的数据分析流程中,单木分割(individual tree division,itd)至关重要,一旦从点云数据中划分出每棵树,就可以直接提取其高度和冠幅大小,并根据树顶点估计所在位置,从而实现与传统调查相一致的目标。itd算法根据面向对象的不同分为两类,在冠层高度模型(canopy heightmode,chm)上进行分割或是依赖于点云数据的三维空间信息直接进行聚类。
4、基于chm的方法与计算机视觉研究相关,从简单阈值分割到各类区域生长并发展至如今被广泛认可的标记分水岭算法(watershed segmentation,ws)。其使用移动窗口进行局部最大值搜索,从预定的种子点开始进行漫水填充操作以完成冠层描绘。方法的改进通常从移动窗口的尺寸着手。一种改进的方法是采用可变窗口,即根据树高与冠幅之间的联系,使窗口尺寸随栅格数值自适应调整。另一些研究参考工程学中的反馈机制,以初始分割结果作为先验知识重新确定窗口大小。总体而言,点云在栅格化的过程中平滑了林木冠层,减少了因局部信息导致的误分,能有效分割树冠。
5、基于点云的itd方式则更侧重于单木的空间结构信息,例如基于局部点密度与点间距信息的无监督分类方法k均值聚类算法和均值漂移等。在此基础上,利用树木的特征信息,更能提高方法的适用性,如基于阈值判别的点云分割算法(point cloudsegmentation,pcs),跨层次组合的层堆叠算法。此外,对初步分割后的点云进行形态判别也是近些年的研究趋势。这些基于点云的itd算法主要依赖类间距、局部密度等空间信息,并结合林木特征进行阈值判断与二次分类,可以更好的利用林下信息,更好的分离单木。
6、基于chm算法在使用可变或者大尺寸窗口时,对冠层清晰,边界明确的林分效果好,过分现象少,匹配准确率高,但在高林分密度或者多层林中易出现漏分。基于点云的分割在试验区均取得了较好的效果,不过由于各地树种及林分密度的过度差异,实际鲁棒性较差。
7、因此,亟需一种结合树顶树干检测与林木模型的机载点云分割方法,以解决现有技术中的不足之处。
技术实现思路
1、本发明的目的在于提出一种结合树顶树干检测与林木模型的机载点云分割方法,以处理复杂冠层结构的林分,改善由于各地树种及林分密度的过度差异,导致实际鲁棒性较差的问题。
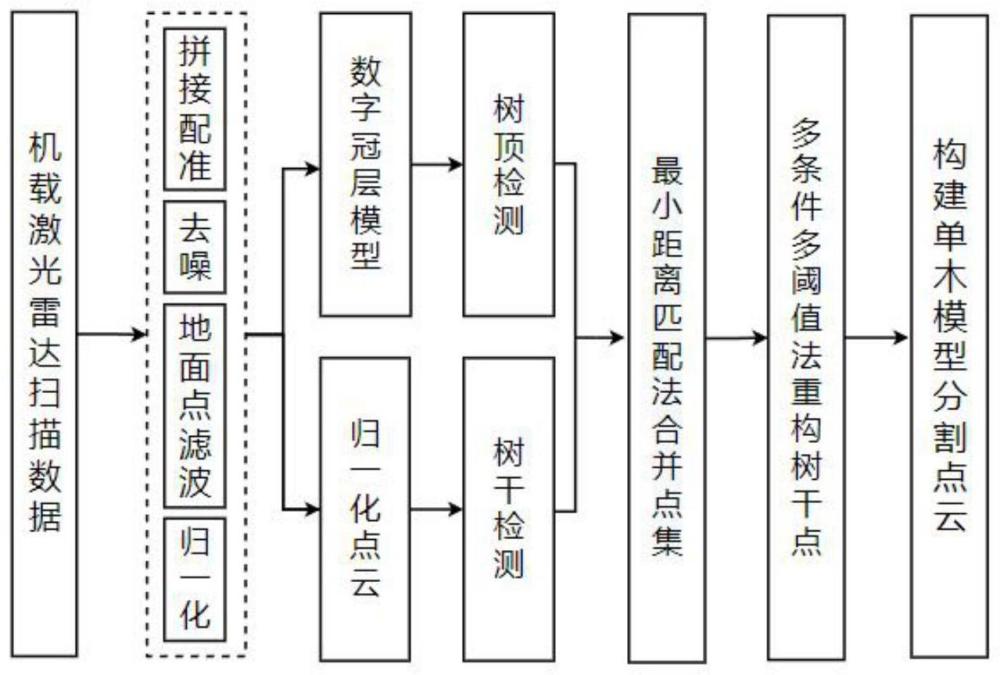
2、为实现上述目的,本发明提供了一种结合树顶树干检测与林木模型的机载点云分割方法,具体包括以下步骤:
3、对原始机载点云数据进行预处理,获取目标点云,并生成冠层高度模型;
4、利用所述冠层高度模型,获取树顶位置;
5、基于所述目标点云,获取树干位置;
6、将所述树顶位置和所述树干位置进行匹配,获取树顶点与树干点的合并点集;
7、利用所述树顶点与树干点的合并点集,重构合并点集中未匹配的树干点,获取重构后的合并点集;
8、通过林木模型和所述重构后的合并点集,完成结合树顶树干检测与林木模型的机载点云分割。
9、可选的,所述预处理过程包括拼接配准、去噪、地面点滤波和归一化。
10、可选的,生成所述冠层高度模型包括:
11、对所述目标点云进行栅格化,获取所述冠层高度模型。
12、可选的,利用所述冠层高度模型,获取所述树顶位置包括:
13、将所述冠层高度模型作为树冠表面灰度图像,并获取所述树冠表面灰度图像中每个像素的灰度值,每个所述像素的灰度值为相对位置的树冠高度;
14、在所述树冠表面灰度图像中设置可滑动窗口,根据所述可滑动窗口,获取窗口范围内灰度值最大点作为中心像素;
15、基于所述中心像素的灰度值,获取所述树顶位置。
16、可选的,基于所述目标点云,获取所述树干位置包括:
17、利用密度聚类算法将所述目标点云进行划分,获取核心点、边界点和噪音点;
18、通过所述核心点和所述边界点,获取所述树干位置。
19、可选的,将所述树顶位置和所述树干位置进行匹配,获取所述树顶点与树干点的合并点集包括:
20、s1、基于所述树顶位置和所述树干位置,计算若干树顶点和若干树干点的距离,构建距离矩阵;
21、s2、利用最小距离匹配法,查找所述距离矩阵中的最小距离,并与阈值距离进行对比;
22、s3、若所述最小距离小于所述阈值距离,则所述最小距离对应的树顶点和树干点匹配成功,并将与所述对应的树顶点和树干点相关的距离值删除;
23、s4、重复s1-s3,直至所述距离矩阵中的最小距离小于所述阈值距离,获取所述树顶点与树干点的合并点集。
24、可选的,利用所述树顶点与树干点的合并点集,重构合并点集中未匹配的树干点,获取重构后的合并点集包括:
25、所述树顶点与树干点的合并点集包括已匹配的树干点集和未匹配的树干点集;
26、通过所述未匹配的树干点集,获取未匹配的树干点,并判断所述阈值距离内是否存在与目标树干点匹配树顶点;
27、若存在,则所述未匹配的树干点为林下木情况,基于所述林下木情况,通过所述阈值距离内第一次回波点kmeans聚类,重构所述树干点;
28、若不存在,则移除所述未匹配的树干点阈值范围内的点,获取最终树干与树顶点点集,并根据所述最终树干与树顶点点集进行重新匹配,重构所述合并点集中未匹配的树干点,获取所述重构后的合并点集。
29、可选的,根据所述最终树干与树顶点点集进行重新匹配,重构所述合并点集中未匹配的树干点包括:
30、若所述最终树干与树顶点点集中的树干点和树顶点不能匹配,则搜索阈值内最高点,进而重构所述合并点集中未匹配的树干点;
31、若所述最终树干与树顶点点集中的树干点和树顶点能匹配,则直接重构所述合并点集中未匹配的树干点。
32、可选的,通过林木模型和所述重构后的合并点集,完成结合树顶树干检测与林木模型的机载点云分割包括:
33、获取林木特征,所述林木特征包括树木高度和理论冠幅;
34、通过所述林木特征,构建所述林木模型;
35、基于所述林木模型,利用所述机载点云数据中各点与所述重构后的合并点集之间的联系,完成结合树顶树干检测与林木模型的机载点云分割。
36、本发明具有以下有益效果:本发明能够有效处理具有复杂冠层结构的林分,对遮挡木有良好的探测能力,且在不同林分密度下具有优异的鲁棒性;本发明能够有效地处理具有复杂冠层结构的林分,对于遮挡木有良好的探测能力,同时在不同林分密度下展现了出色的稳定性,尤其适用于同时具有冠层和林下结构的林分。
- 还没有人留言评论。精彩留言会获得点赞!