基于多通道立体视觉的电梯曳引轮轮槽重建方法及系统
本发明属于机器视觉检测,本发明涉及一种基于多通道立体视觉的电梯曳引轮轮槽重建方法及系统。
背景技术:
1、电梯作为高层建筑中不可缺少的特种交通设施之一,可有效提升乘客的流动效率,节省大量时间和体力,极大地方便了人们的交往和物资的运输。曳引轮是电梯曳引系统重要组成部件,曳引机通过曳引轮的轮槽与钢丝绳间的摩擦力为电梯轿厢上下运动提供驱动力。然而电梯长期运行过程中,受钢丝绳张力不均、装配误差过大等因素影响,曳引轮的轮槽容易发生磨损,导致电梯运行时产生噪声和振动,严重时甚至发生溜梯、墩底等事故,威胁乘客人身安全。
2、目前,常用的电梯曳引轮的轮槽三维尺寸检测方法主要有:目视法、角尺+塞尺法、橡皮泥或塑性胶法、规塞式工装测量法、专用深度尺检验法、声发射判断法、激光位移非接触检测法、结构光非接触检测法等。目视法、角尺+塞尺法是传统的检测方法,主要依靠经验,橡皮泥或塑性胶法受到橡皮泥和塑性胶成型时间和成型状态的影响,均存在检测精度低、效率低等问题。规塞式工装测量法、专用深度尺检验法通用性不强,无法检测全部特征尺寸。声发射判断法主要用于在线评估,欠缺可靠性。激光位移非接触检测法和结构光非接触检测法,检测精度高,但是夹具装设不方便,检测效率较低。
3、申请号2021104901488公开了一种基于机器视觉的电梯曳引轮磨损量表征方法及系统,通过获取待测目标图像,提取目标绳槽轮廓图像;采用模拟退火算法进行目标绳槽轮廓图像的上、下边界拟合,查找最佳阈值,拟合曳引轮槽图像边界;对于无法避免的测量遮挡问题,建立曳引轮数学模型,对结果进行补偿,保证测量结果准确。该方法通过图像拟合得到,计算量较大,并且精度受限。
技术实现思路
1、本发明的目的在于提供一种基于多通道立体视觉的电梯曳引轮轮槽重建方法及系统,通过构建多相机网络和设计编码标识实现曳引轮的三维重建,进而完成曳引轮磨损量的精确测量,实现准确、高效的曳引轮缺陷检测。
2、实现本发明目的的技术解决方案为:
3、一种基于多通道立体视觉的电梯曳引轮轮槽重建方法,包括以下步骤:
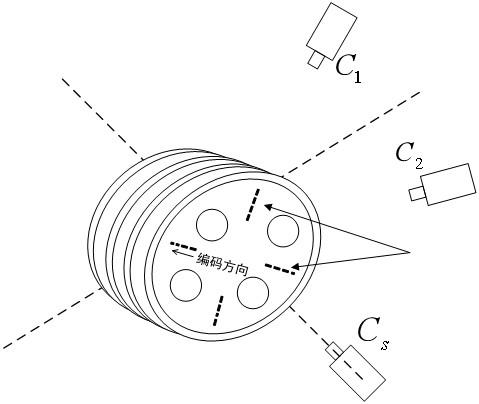
4、s01:构建多通道立体视觉相机网络,所述相机网络包括第一相机和第二相机,所述第一相机用于获取曳引轮图像,所述第二相机用于获取曳引轮的标记位置的图像;
5、s02:通过编码条标记曳引轮的实时转动位置;
6、s03:通过视觉测量方法获取曳引轮轮槽上点的三维信息,根据成像时刻和编码条的角度关系得到完整的曳引轮轮槽图像,对曳引轮轮槽进行三维重建。
7、优选的技术方案中,所述步骤s03之后还包括,根据视觉测量得到的像素三维坐标数据,最终形成完整的曳引轮三维结构。
8、优选的技术方案中,得到曳引轮三维结构之后还包括,根据待测曳引轮的结构数据,生成标准的曳引轮三维信息,计算磨损量:
9、
10、其中,、分别为坐标旋转和平移矩阵,为获得的三维坐标数据集,为测得的三维坐标数据集。
11、优选的技术方案中,所述编码条由长、短两种直线组成,分别代表二进制的0和1,编码方向从靠近曳引轮轴线值曳引轮边缘,一个编码条的码值为:
12、
13、其中,为一个码元所在的位置,为编码位数。
14、优选的技术方案中,所述步骤s02还包括对编码条进行提取及解码,方法包括:
15、根据曳引轮侧面的轮廓图,使用直线检测方法提取编码条,得到的曳引轮编码条的点集为:
16、
17、其中,为编码条的编码位数,为编码条的数量,为编码条的索引,为一个编码条中码元的索引,、分别为编码条像素的横、纵坐标集合,即第个编码条中第个码元线段的像素点横、纵坐标集合;
18、每个码元线段的长度使用下式进行计算:
19、
20、根据每条码元线段长短得到每个码元对应的编码;
21、随机选取两个编码条,得到它们的端点坐标,分别设为、和、,首先判断两条直线是否共线,如果共线则丢弃其中之一后重新选择;
22、联立两条直线的方程得到两个编码条的交点:
23、
24、两条直线的交点即为曳引轮侧面的中心点,与中心点距离较近的端点则为当前编码表的编码起始点;
25、根据以上码元线段长度和编码起始点的计算结果,实现对编码条的解码。
26、优选的技术方案中,所述步骤s03中获取曳引轮轮槽上点的三维信息的方法包括:
27、对于相机、组成的双目立体视觉系统,设曳引轮轮槽上一点在两个相机中所成的像分别为和,它们的像素坐标分别为和,根据相机成像原理,、与点存在如下关系:
28、
29、其中,、分别为相机、的内参矩阵,、分别为相机、的旋转参数矩阵,、分别为相机的平移参数矩阵,为点在参考坐标系中的坐标,、分别为两相机成像的比例系数,求解得到:
30、其中,,分别是矩阵、中第行第列元素,,是向量,中第个元素;
31、得到点在参考坐标系下的坐标为:
32、
33、其中,中间变量。
34、优选的技术方案中,所述步骤s03中对曳引轮轮槽进行三维重建的方法包括:
35、对曳引轮进行成像时,首先计算每个编码条与水平方向之间的夹角:
36、
37、其中,为编码条的索引,、、和分别为一个编码条的两个端点坐标,当第一相机成像时,第二相机同步对附有编码条的曳引轮侧面进行成像,根据每个编码条的方向确定成像图片在曳引轮整体结构中的位置;
38、设成像的起始时刻为,此时记录码值为0的编码条与水平方向的夹角,此角度为曳引轮轮槽成像的基准角;
39、对曳引轮轮槽的每帧成像使用如下结构表示:
40、
41、其中,表示码值为0的编码条在时刻相对水平方向的角度,表示与在时刻对曳引轮轮槽的成像距离最近的编码条的水平方向夹角,为编码条的索引,为时刻曳引轮轮槽成像中感兴趣区域的像素数据。
42、本发明还公开了一种基于多通道立体视觉的电梯曳引轮轮槽重建系统,包括:
43、多通道立体视觉相机网络构建模块,构建多通道立体视觉相机网络,所述相机网络包括第一相机和第二相机,所述第一相机用于获取曳引轮图像,所述第二相机用于获取曳引轮的标记位置的图像;
44、编码条解码模块,通过编码条标记曳引轮的实时转动位置;
45、曳引轮轮槽三维重建模块,通过视觉测量方法获取曳引轮轮槽上点的三维信息,根据成像时刻和编码条的角度关系得到完整的曳引轮轮槽图像,对曳引轮轮槽进行三维重建。
46、本发明又公开了一种基于多通道立体视觉的电梯曳引轮磨损量检测系统,包括上述的电梯曳引轮轮槽重建系统,还包括磨损量检测模块,根据视觉测量得到的像素三维坐标数据,最终形成完整的曳引轮三维结构;根据待测曳引轮的结构数据,生成标准的曳引轮三维信息,计算磨损量:
47、
48、其中,、分别为坐标旋转和平移矩阵,为获得的三维坐标数据集,为测得的三维坐标数据集。
49、本发明又公开了一种计算机存储介质,其上存储有计算机程序,所述计算机程序被执行时实现上述的基于多通道立体视觉的电梯曳引轮轮槽重建方法。
50、本发明与现有技术相比,其显著优点为:
51、本发明通过构建多相机网络和设计编码标识实现曳引轮的三维重建,进而完成曳引轮磨损量的精确测量,实现准确、高效的曳引轮缺陷检测。电梯曳引轮的精确三维测量和磨损量的实时监测,从而对曳引轮的磨损、形变等及时发现、及时处理,能够有效提升电梯运行的安全性、可靠性,具有广阔的市场应用前景。
- 还没有人留言评论。精彩留言会获得点赞!