塔吊的吊索识别方法、识别装置、电子设备和存储介质与流程
本技术属于图像处理,尤其涉及一种塔吊的吊索识别方法、识别装置、电子设备和存储介质。
背景技术:
1、塔吊在作业过程,需要防止发生碰撞,一般有如下两种碰撞情况:(1)塔群生产或施工场景下,包括至少两个塔吊,塔吊和塔吊之间发生碰撞;(2)塔吊的起重臂、吊索、吊钩和所吊装物体等部件与场景中周边的建筑或树木等障碍物发生碰撞。
2、对于场景(1),由于塔身的位置是固定的,通过建立塔吊之间统一的坐标系,获取各个变幅小车的变幅位置和起重臂的回转位置,再通过网络通信实现塔吊之间的时间对齐,就可以实时判断塔吊和塔吊之间的起重臂和变幅小车的位置信息,从而实现避免碰撞。对于场景(2),由于较难实时检测吊索、吊钩、吊装物体等部件的位置及其到障碍物的距离,特别是吊索存在目标细而长的问题,更难实时检测和定位,使得很难实现自适应的防碰撞。
3、针对以上问题,相关技术中,一般是基于导航卫星系统(包括gps、北斗等)和相机的吊钩定位方法,通过吊钩推测吊索,该方法成本较高,且其定位精度受天气和场景中的环境影响。或者,通过激光雷达对场景进行扫描,通过识别出吊物区域的点云,再结合导航卫星系统定位出吊钩位置,然后间接获取吊索点云,这种方式同样存在定位精度受天气和现场周围环境影响的问题。
技术实现思路
1、本技术旨在至少解决现有技术中存在的技术问题之一。为此,本技术提出一种塔吊的吊索识别方法、识别装置、电子设备和存储介质,可快速、准确和实时地自动提取出吊索点云。
2、第一方面,本技术提供了一种塔吊的吊索识别方法,所述塔吊包括起重臂、安装于所述起重臂的变幅小车以及安装于所述变幅小车的吊索,该方法包括:
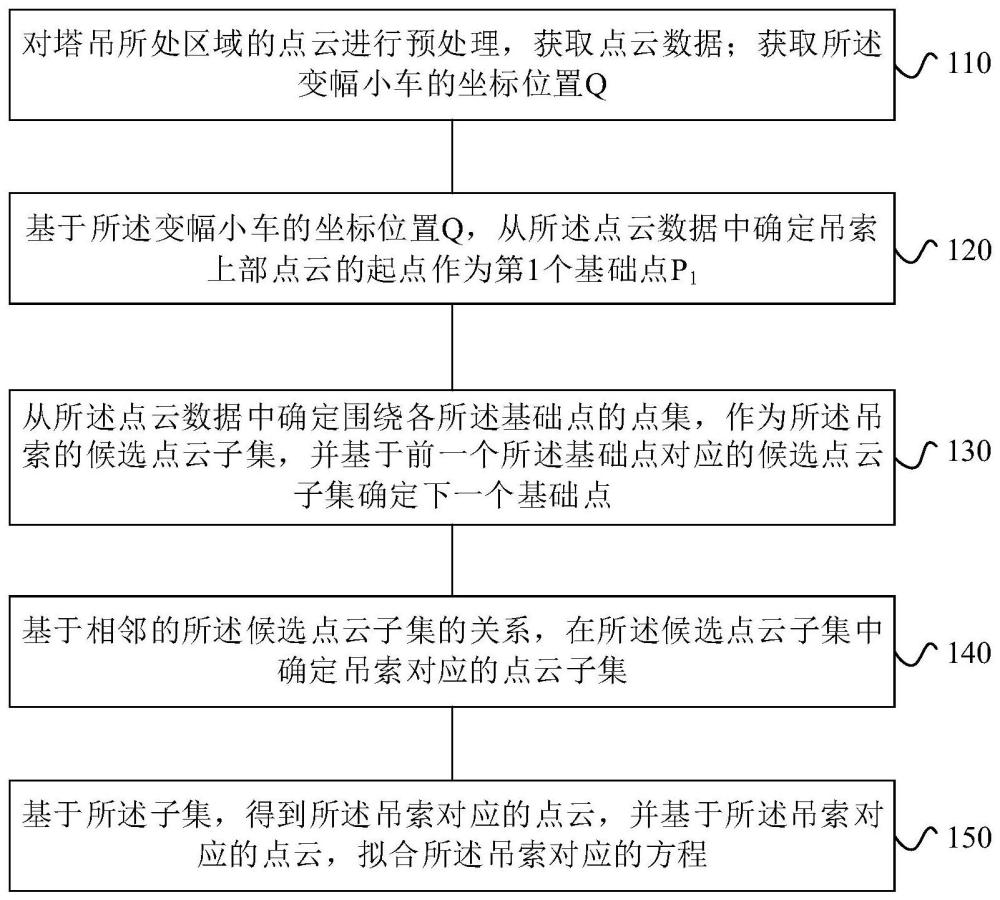
3、对塔吊所处区域的点云进行预处理,获取点云数据,所述点云数据中的点云不高于所述吊索的顶点;获取所述变幅小车的坐标位置q;
4、基于所述变幅小车的坐标位置q,从所述点云数据中确定吊索上部点云的起点作为第1个基础点p1;
5、从所述点云数据中确定围绕各所述基础点的点集,作为所述吊索的候选点云子集,并基于前一个所述基础点对应的候选点云子集确定下一个基础点;
6、基于相邻的所述候选点云子集的关系,在所述候选点云子集中确定吊索对应的点云子集;其中,所述吊索对应的点云的子集包括基于第1个基础点确定出的候选点云子集;
7、基于所述吊索对应的点云子集,得到所述吊索对应的点云,并基于所述吊索对应的点云,拟合所述吊索对应的方程。
8、根据本技术实施例提供的吊索识别方法,通过变幅小车的坐标从场景的整体点云中直接找到吊索顶端位置,该位置准确,且不受天气和现场周围环境的影响,在起点准确的前提下,再通过逐步推导的方式,逐个检索点云子集,最后可快速、准确和实时地自动提取出吊索点云,并且满足点云动态避障的要求。
9、根据本技术的一个实施例,所述从所述点云数据中确定围绕各所述基础点的点集,作为所述吊索的候选点云子集,并基于前一个所述基础点对应的候选点云子集确定下一个基础点,包括:
10、在所述点云数据中确定围绕所述第i个基础点pi的点集{qi}作为所述吊索的候选点云子集,基于所述点集{qi}拟合得到直线li,基于所述点集{qi}和所述直线li确定第i+1个基础点pi+1;i≥1。
11、上述方式可在检索下一个候选点云子集的同时检索到用于确定下一个候选点云子集的基础点,通过多次迭代,可从点云数据中找到所有的候选点云子集。
12、根据本技术的一个实施例,所述基于所述点集{qi}和所述直线li确定第i+1个基础点pi+1,包括:
13、将所述点集{qi}正射投影到所述直线li,得到的线段li;其中,线段li为直线li上位于两端的投影点的连线;
14、基于所述线段li的下端点pidn的坐标,确定第i+1个基础点pi+1;其中,所述第i+1个基础点pi+1为直线li上位于所述下端点pidn下方且距离所述下端点pidn目标长度s的点。
15、根据本技术的一个实施例,所述在所述点云数据中确定围绕所述第i个基础点pi的点集{qi},包括:
16、将所述点云数据中距离所述第i个基础点pi的距离不大于目标距离r的所有点的集合确定为点集{qi}。
17、根据本技术的一个实施例,所述基于相邻的所述候选点云子集的关系,在所述候选点云子集中确定吊索对应的点云子集,包括:
18、在第i个候选点云子集拟合得到的直线li与第i+1个候选点云子集拟合得到的直线li+1的夹角θi≤β的情况下,将第i+1个候选点云子集{qi+1}确定为所述吊索对应的点云的子集;其中,β为目标角度。
19、根据本技术的一个实施例,所述的吊索识别方法还包括:
20、在直线li与直线li+1的夹角θi>β,或者第i+1个候选点云子集的情况下,停止确定下一个基础点。
21、根据本技术的一个实施例,所述基于所述变幅小车的坐标位置q,从所述点云数据中确定吊索上部点云的起点作为第1个基础点p1,包括:
22、将所述点云数据中距离所述变幅小车的坐标位置q最近的点,作为所述吊索的起点及所述第1个基础点p1。
23、根据本技术的一个实施例,所述对塔吊所处区域的点云进行预处理,获取点云数据,所述点云数据中的点云不高于所述吊索的顶点,包括:
24、对塔吊所处区域的点云进行噪点滤除,且去除高度大于所述起重臂底部的点云,得到所述点云数据。
25、根据本技术的一个实施例,所述获取所述变幅小车的坐标位置q,包括:
26、获取所述变幅小车的变幅值、所述起重臂的回转角度以及所述起重臂底部的高度;
27、基于所述变幅小车的变幅值、所述起重臂的回转角度以及所述起重臂底部的高度,确定所述变幅小车的坐标位置q。
28、第二方面,本技术提供了一种塔吊的吊索识别装置,所述塔吊包括起重臂、安装于所述起重臂的变幅小车以及安装于所述变幅小车的吊索,该装置包括:
29、获取模块,用于对塔吊所处区域的点云进行预处理,获取点云数据,所述点云数据中的点云不高于所述吊索的顶点;获取所述变幅小车的坐标位置q;
30、第一确定模块,用于基于所述变幅小车的坐标位置q,从所述点云数据中确定第1个基础点p1;
31、第二确定模块,用于从所述点云数据中确定围绕各所述基础点的点集,作为所述吊索的候选点云子集,并基于前一个所述基础点对应的候选点云子集确定下一个基础点;
32、第三确定模块,用于基于相邻的所述候选点云子集的关系,在所述候选点云子集中确定吊索对应的点云子集;其中,所述吊索对应的点云的子集包括基于第1个基础点确定出的候选点云子集;
33、第四确定模块,用于基于所述吊索对应的点云子集,得到所述吊索对应的点云,并基于所述吊索对应的点云,拟合所述吊索对应的方程。
34、根据本技术的塔吊的吊索识别装置,从场景的整体点云中直接找到吊索顶端位置,并通过逐步推导的方式,可快速、准确和实时地自动提取出吊索点云,并且满足点云动态避障的要求
35、第三方面,本技术提供了一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述第一方面所述的塔吊的吊索识别方法。
36、第四方面,本技术提供了一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述第一方面所述的塔吊的吊索识别方法。
37、第五方面,本技术提供了一种芯片,所述芯片包括处理器和通信接口,所述通信接口和所述处理器耦合,所述处理器用于运行程序或指令,实现如第一方面所述的塔吊的吊索识别方法。
38、第六方面,本技术提供了一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述第一方面所述的塔吊的吊索识别方法。
39、本技术的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!