互相关观测噪声下数据驱动的多传感器航迹融合方法
本发明涉及信息融合,具体为一种互相关观测噪声下数据驱动的多传感器航迹融合方法。
背景技术:
1、多传感器航迹融合方法被广泛应用于目标跟踪、航空航天和自动驾驶等领域,能够利用多个传感器的观测信息,融合获得更高精度且更可靠的系统状态的估计值。多传感器融合方法通常有中心式融合和分布式融合两种融合框架,在中心式融合框架下传感器需要将观测信息传输给融合中心,融合中心利用扩展后的观测信息进行全局最优估计,在分布式融合框架下传感器需要根据本地观测信息进行估计,然后将本地估计传输给融合中心,融合中心利用本地估计给出最优或次优估计。与中心式融合相比,分布式融合具有更低的通信开销和计算开销,更灵活可靠,更适用于大规模传感器网络系统,因此分布式融合在工程领域有着更广泛的应用。
2、在复杂的实际应用场景中,传感器网络中的观测噪声通常是非独立或互相关的,无论是中心式融合还是分布式融合框架,最终融合的精度通常都会受传感器网络中观测噪声的相关不确定性影响。技术难点在于传感器网络中的观测噪声相关不确定性难以获得或者不能准确地估计,直接影响多传感器航迹融合方法的性能,难以满足状态估计等方面的迫切需求。
3、分布式信息融合方法由于其在计算和通信开销上具有明显的优势而被广泛地使用,这一方法的关键是对传感器网络中观测噪声的相关不确定性的处理,目前分布式信息融合方法在多传感器融合时往往需要计算它们的互协方差,然而互协方差矩阵的计算可能是复杂和困难的,甚至在许多实际应用中是不可能的,因此uhlmann等人提出了协方差交叉融合(ci)方法,该方法不需要计算互协方差,所以可以有效地解决互协方差未知的系统的融合问题,但是这种方法往往导致高度保守的估计,即估计的协方差椭球可能远远大于实际协方差椭球。
4、由于人工神经网络方法的优秀逼近性能,越来越多传统的基于模型的方法在数据驱动的方式下性能得到了大幅提升,但是对于传感器网络间的噪声相关不确定性问题,分布式信息融合方向还没有基于数据驱动的改进方法。因此,考虑基于数据驱动的多传感器航迹融合方法,以此来估计传感器网络中噪声相关不确定性从而改善融合精度是非常有必要的。
技术实现思路
1、针对上述问题,本发明的目的在于提供一种互相关观测噪声下数据驱动的多传感器航迹融合方法,能够通过学习带标签的数据集从而隐式地学习传感器网络中的噪声相关不确定性,进而获得更高精度的融合结果。技术方案如下:
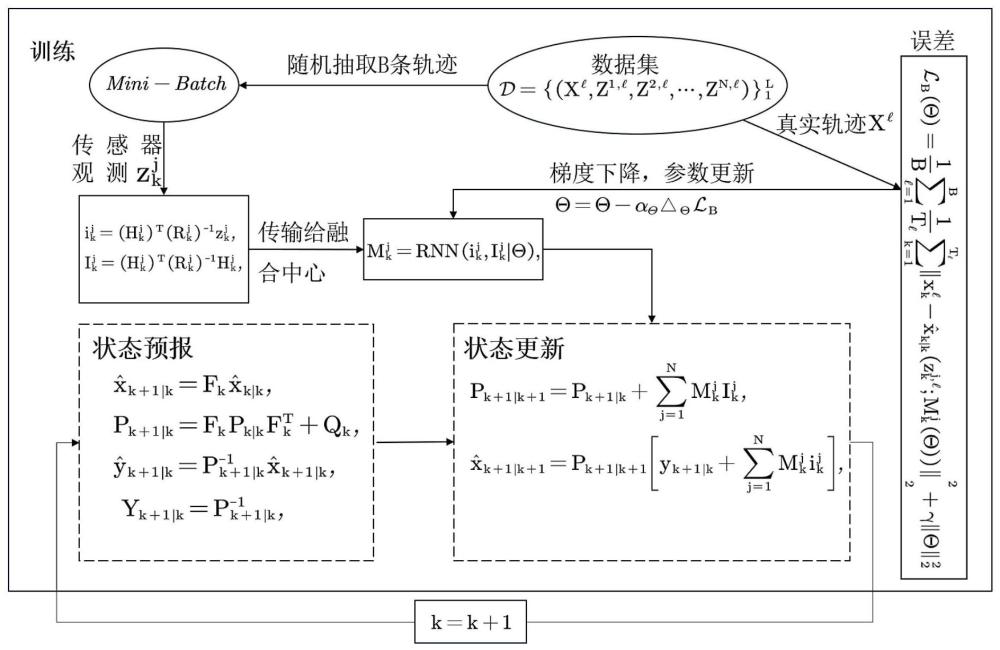
2、一种互相关观测噪声下数据驱动的多传感器航迹融合方法,包括训练步骤,即从数据集中学习噪声相关不确定性,具体过程如下:
3、步骤1:初始化状态空间模型,包括状态转移矩阵fk、观测矩阵过程噪声协方差矩阵qk、观测噪声协方差矩阵数据集初始状态x0和初始协方差矩阵p0;
4、其中,数据集由n个传感器的l条观测轨迹和l条目标运动真实轨迹构成,每条轨迹的长度为tl,数据集具体形式为真实轨迹传感器观测轨迹
5、步骤2:对于训练回合epoch=0到ne,执行以下步骤:
6、步骤3:从数据集中随机抽取b条轨迹组成小批量样本,满足b<l,表示为:
7、
8、其中,mini-batch为小批量样本数据集;
9、步骤4:对每条轨迹l=1到b,执行以下步骤:
10、步骤4.1:对轨迹l中的每个时刻k,且k=1到tl,执行以下步骤:
11、步骤4.1.1:融合中心根据k时刻的状态定界椭球、状态转移方程和过程噪声信息,预报k+1时刻的信息状态向量和信息矩阵yk+1|k;详细步骤如下:
12、k时刻的状态定界椭球表示为:
13、
14、其中,表示k时刻状态定界椭球的中心点,同时表示k时刻的状态估计值,pk|k表示k时刻状态定界椭球的形状矩阵;ek为k时刻的期望算子;
15、k时刻的状态转移方程表示为:
16、
17、其中,为k+1时刻的状态估计值,fk为k时刻的状态转移矩阵;
18、k时刻的过程噪声信息表示为:随机变量过程噪声vk属于椭球集中;其中,0表示椭球的中心点,qk表示椭球的形状矩阵;
19、k时刻中预报的k+1时刻的信息状态向量表示为:
20、
21、其中,pk+1|k表示k+1时刻形状矩阵预报值,具体形式为:
22、
23、k时刻中预报的k+1时刻的信息矩阵yk+1|k表示为:
24、
25、步骤4.1.2:n个传感器根据k时刻的观测信息计算k时刻中本地状态误差信息和本地协方差信息并将其传输给融合中心;
26、k时刻中的本地状态误差信息表示为:
27、
28、其中,表示第j个传感器的观测矩阵;表示第j个传感器观测噪声的椭球形状矩阵;对于i≠j,和在时间戳k上是互相关的;
29、k时刻中的本地状态误差信息表示为:
30、
31、步骤4.1.3:融合中心根据k时刻传感器传输的本地状态误差信息和本地协方差信息计算融合权重k时刻中融合权重表示为:
32、
33、其中,rnn表示循环神经网络,θ是网络参数;本地状态误差信息和本地协方差信息作为循环神经网络的输入;融合权重为循环神经网络的输出;
34、步骤4.1.4:融合中心根据k时刻的预报信息状态向量预报信息矩阵yk+1|k和融合权重更新k+1时刻状态向量和形状矩阵pk+1|k+1;
35、k时刻中更新的形状矩阵pk+1|k+1表示为:
36、
37、k时刻中更新的状态向量表示为:
38、
39、步骤5:更新时刻参数k=k+1,返回步骤4.1;
40、步骤6:更新轨迹参数l=l+1,返回步骤4;
41、步骤7:根据b条长度为tl的估计轨迹和b条长度为tl的真实轨迹计算误差误差表示为:
42、
43、其中,θ为网络参数,γ为正则项系数;表示l2范数的平方;
44、步骤8:根据所述步骤7中计算的误差对网络参数θ进行更新;更新方式为梯度下降方法,具体形式为:
45、
46、其中,αθ为梯度下降步长,δθ为关于网络参数θ的微分算子;
47、步骤9:更新训练回合参数epoch=epoch+1,返回步骤2。
48、进一步的,还包括测试步骤,即利用训练后的网络进行多传感器航迹融合,具体过程为:
49、步骤a:初始化状态空间模型,包括状态转移矩阵fk、观测矩阵过程噪声协方差矩阵qk、观测噪声协方差矩阵数据集初始状态x0和初始协方差矩阵p0;
50、步骤b:对于每个时刻k,执行所述步骤4.1.1-步骤4.1.4的操作;
51、步骤c:更新时刻参数k=k+1,返回步骤b,直到k=tl。
52、更进一步的,所述步骤4.1.3中,循环神经网络执行步骤具体如下:
53、在k时刻,融合中心将n个传感器传输的本地状态误差信息和本地协方差信息拉伸成向量并进行拼接,作为循环神经网络的输入,经过一层全连接层,将输入信息映射到高维变量;高维变量和上一时刻的隐层输出hk-1作为门控循环单元的输入;然后经过重置门、更新门和复合门输出隐层变量hk;最后将隐层变量hk经过全连接层,线性变换输出融合权重
54、重置门计算公式表示为:
55、rk=σ(wrxk+urhk-1+br)
56、重置门由全连接层输出的高维变量xk和上一时刻的隐层输出hk-1作为输入,wr、ur和br为重置门参数;σ(·)为sigmoid激活函数;
57、更新门计算公式表示为:
58、zk=σ(wzxk+uzhk-1+br)
59、更新门由全连接层输出的高维变量xk和上一时刻的隐层输出hk-1作为输入,wz、uz和bz为更新门参数;
60、复合门计算公式表示为:
61、hk=zk·hk-1+(1-zk)tanh(wcxk,uc(rk·hk-1))
62、复合门由全连接层输出的高维变量xk、上一时刻的隐层输出hk-1、重置门输出rk和更新门zk作为输入,wc和uc为复合门参数。
63、本发明的有益效果是:
64、1)本发明是首个在互相关观测噪声下数据模型双驱动进行多传感器航迹融合的方法,具有高精度和可解释性,为分布式信息融合中噪声相关不确定性提供了新的解决思路。
65、2)本发明利用了循环神经网络数据流的特性,使得观测矩阵和噪声的相关不确定性rk的知识随着时间可以被动态更新,因此融合精度会得到进一步提升。
66、3)实际上,当传感器网络跟踪模式给定时,融合权重本质上是一个定值,因此本发明中网络训练的难度显著降低,只需要少量的训练回合即可使得训练误差收敛。
- 还没有人留言评论。精彩留言会获得点赞!