一种有杆泵抽油井故障诊断方法及系统
本发明涉及油气勘探与开发,尤其涉及一种有杆泵抽油井故障诊断方法及系统。
背景技术:
1、机械采油是我国石油开采中所采用的主要的开采方式,我国的机械采油井约占抽油井总数的90%以上。目前的机械采油主要包括有杆泵、无杆泵、气举和其他等抽油系统,有杆泵抽油系统是主要的机械采油方式,有杆泵抽油井占机械抽油井的90%左右,产量约占75%以上,抽油泵在井下工作的环境十分恶劣,会受到“砂、腊、水、气”等因素的影响,其是否安全可靠的运行直接影响油井的生产效率及企业的经济效益,因此为了确保有杆泵抽油系统的正常运行,需要对井下抽油泵的工作状况有清晰准确的认识。
2、有杆泵抽油系统主要是通过示功图法对井下工况进行识别,根据测量的数据绘制出封闭的四边形的形状来判断井下发生的故障,对于有杆泵抽油系统的工况识别技术主要有四种方法,分别是:地面示功图诊断法、井下示功图诊断法、计算机诊断法和人工智能诊断法。
3、目前,有杆泵抽油系统的工况故障诊断工作主要存在以下问题:
4、(1)有杆泵抽油系统在开采过程中未知故障的识别问题
5、有杆泵抽油系统在采油过程中,实际上会出现新的故障类型,已知类型故障和新出现的未知类型故障数据分布存在差异,而传统的诊断模型需要大量历史数据作为记录作为对照训练,经过训练的模型只能分辨已知的故障种类,无法跨领域识别未知类故障,缺乏领域适应性,难以满足诊断需求。
6、(2)有杆泵抽油系统示功图故障检测过程过于繁琐问题
7、有杆泵抽油系统利用示功图进行井下工况识别,故障诊断前期需要经过数据采集、数据预处理、示功图制作、特征库建立等步骤,还需要搭建故障诊断模型、导入数据进行训练和测试,最后才能进行故障诊断,整个过程消耗时间长、步骤繁琐还需要专业技术人员进行整个过程的把控,导致故障诊断工作效率不高,影响有杆泵抽油系统生产效率。
8、针对上述问题,国内外分别采取了相应的解决措施,具体方法如下:
9、第一、有杆泵抽油系统的故障诊断工作主要是采用示功图法,针对未知的新故障诊断问题,目前的具体诊断方法主要有:(1)采用人工巡视的方式进行检查,利用人工经验对采集的示功图进行判别是否为新型未知故障;(2)大量收集新型未知故障的数据,建立特征库,搭建故障诊断模型利用矢量特征法对多边形逼近处理后的示功图与新型未知故障的特征库进行对比分析,若特征符合,则为该新型未知故障。目前,这些方法比较复杂耗时,诊断过程复杂、准确性和有效性不高且无法对新型未知故障进行实时监测。
10、第二、对于油田的故障诊断工作,一般采用抽油机故障监测系统,将得到的示功图数据集导入系统中的诊断模型中,进行检测,但该系统中的功能不够完善,无法对示功图数据进行预处理消去数据误差的影响,得到的诊断结果需要技术人员进行判别故障类型,需要进一步的改进系统。
11、为此,设计一种有杆泵抽油井故障诊断方法及系统,解决以上问题。
技术实现思路
1、本发明的目的在于克服现有技术中的不足,提供一种有杆泵抽油井故障诊断方法及系统,以实现可以识别目标故障是否为新出现的故障,使得故障诊断识别整个过程方便简洁,对操作人员更加友好。
2、一种有杆泵抽油井故障诊断方法,包括如下步骤:
3、步骤一、故障样本数据集制作
4、数据集划分:数据集分为源域数据集和目标域数据集,所述源域数据集的故障类型为已知类型故障,所述已知类型故障包括但不限于正常工况、气体影响、供液不足,所述目标域数据集包括但不限于气锁、上碰泵、下碰泵、游动阀关闭迟缓,所述目标域数据集中的游动阀关闭迟缓为未知类故障,在所述数据集的基础上构造6个不同的开放域自适应诊断子任务(),每个子任务有六种故障工况,6类已知类故障和1类未知类故障,并使每个子任务中的未知类故障分别为气体影响、供液不足、气锁、上碰泵和下碰泵;
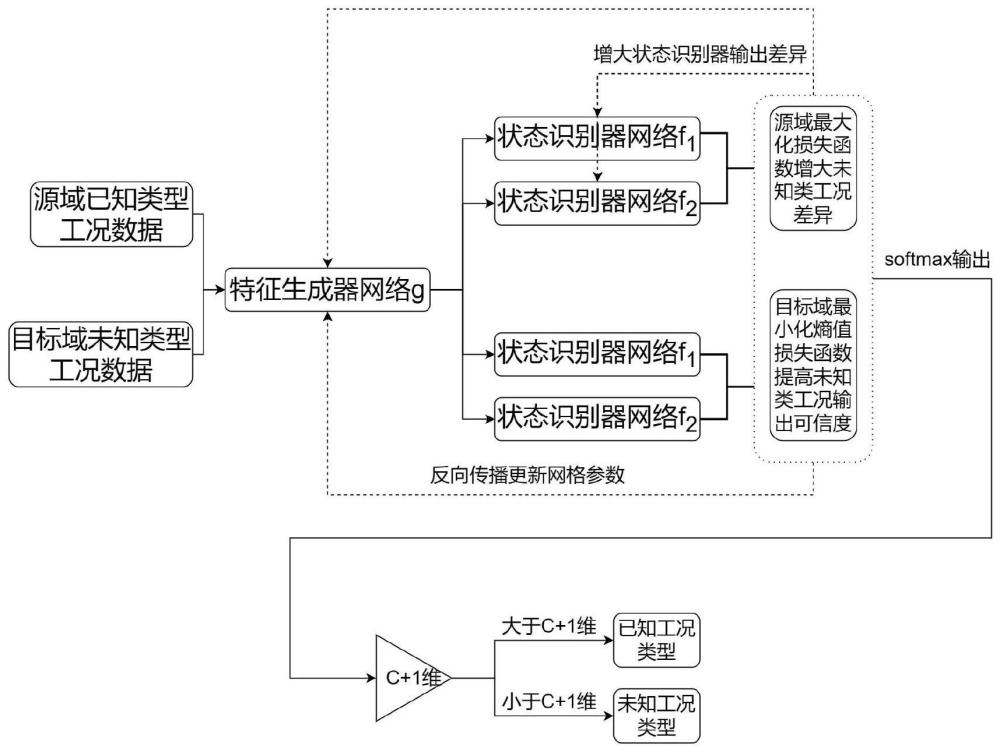
5、步骤二、双识别器对抗的开放域自适应网络模型搭建
6、该网络包括:一个特征生成器、两个结构相同的识别器
7、和
8、其中,是网格参数,特征生成器g由两个卷积层、两个池化层和一个全连接层组成,两个卷积核分别为20和50,最大池化区域均为,全连接层神经元数量为600,两个识别器和在特征生成器网络结构的基础上,增加两个全连接层,神经元数量分别100和c+1;
9、步骤三、判断检验的未知新型故障的准确度
10、模型训练的epochs取60,批处理batch-size取32,学习率取0.001,采用不同的模型分别对变工况下的6个开放域任务 ,目标域作为特征生成器g的输入,获取的特征 经过两个识别器和处理输出c+1维,前c维表示辨识为已知类型的概率,最后一维表示判定为新出现未知故障类型的概率,并将结果展示。
11、优选的,所述步骤一中是故障类型采用熵来表征样本是否属于已知类或者未知类的不确定性,熵越小,目标域样本更大概率属于已知类;反之越大概率属于新出现的未知类,在最大差异度量算法的基础上,为了更有效地检测远离识别器的样本,给具有较大熵值的目标域样本赋予较小的权重,基于熵的权重计算如式:
12、
13、
14、式中,表示目标域样本,属于第k类的概率,分别表示识别器f1和f2对样本输出矩阵的第k维元素;
15、正确识别源域样本类型对源域样本的监督训练,采用最小化交叉熵损失函数如下:
16、
17、将属于已知类但远离识别器支持的样本归入识别器的支持,以此判定目标域已知类,损失函数如下:
18、
19、假设识别器对目标域样本的概率输出的各维均在1/(c+1)左右,那么判定为第k类的可信度较低,为使对目标域样本辨识的不确定度低、可信度高,最小化目标域样本的熵值损失函数如下:
20、
21、利用的第c+1维来判定目标域未知类故障,采用两个而元交叉方案,目标域样本概率输出的第c+1维的值趋近于t,取t值为0.5,最小化二元交叉熵损失函数如下:
22、
23、为避免将目标域中所有已知类、未知类样本判定为未知类,的前c维与第c+1维之间建立差异损失函数,最小化二元交叉熵损失函数如下:
24、
25、
26、
27、优选的,所述步骤二中双识别器对抗的开放域自适应网络模型搭建的训练分为以下步骤:
28、第一步,利用源域样本及其标签对特征生成器g和两个识别器f1、f2进行监督学习,更新网络参数θg、和损失函数如下:
29、
30、第二步,训练两个识别器f1、f2,增加二者之间输出的差异,更新网络参数和损失函数如下:
31、
32、第三步,训练特征生成器g,减小两个识别器输出的差异,更新网络参数θg,损失函数如下:
33、
34、一种有杆泵抽油井故障诊断系统,用于实现所述的有杆泵抽油井故障诊断方法,所述的有杆泵抽油井故障诊断系统包括主功能模块、数据处理模块、结果展示模块及用户管理模块;
35、所述主功能模块用于一键将特征库导入故障诊断模型并对其进行模型训练、测试,自动选出最优诊断模型,显示诊断结果并给出相应建议和正确率;
36、所述数据处理模块用于批量处理数据,对井下采集到的位移、载荷数据进行数据预处理,删除异常值、缺失值等操作,并将归一化、四通待提取、二值化等操作封装起来使其可以一键生成示功图特征库;
37、所述结果展示模块用于查看模型达到最优性能的程度;
38、所述用户管理模块用于对登录界面的账号进行增、删、改、查操作。
39、优选的,所述达到最优性能的程度包括但不限于损失率、准确率。
40、优选的,所述主功能模块的训练模型有两种,分别为alexnet和resnet神经网络。
41、优选的,所述有杆泵抽油井故障诊断系统的故障诊断模型参数可自定义设定,可自定义设定的故障诊断模型参数包括但不限于学习率、迭代次数、投喂的批量尺寸。
42、优选的,所述有杆泵抽油机一体化故障诊断系统的开发语言为python,设计平台为qtdesigner库,资源转换和打包的外部插件为pyuic和pyinstaller。
43、本发明的有益效果是:
44、本发明所述的一种有杆泵抽油井故障诊断方法和系统将数据处理和模型训练测试作为一体化设计,并在模型中加入了基于识别器对抗的开放域自适应网络,其中基于最大识别器差异度量算法,融入样本权重,或区域不变特征,用于辨别目标域中的已知故障类型,引入熵和目标域输出的二元交叉方案,可以增强目标域的已知故障种类和未知故障种类的差异,使特征生成器的输出作为识别器的输入,经过两个神经网络识别器处理后输出的c+1维,前c维代表已知类型的故障,最后一维代表新出现的未知故障类型的概率。其具有以下几个优点:
45、第一:该一体化故障诊断系统将用代码实现故障诊断的形式集成到系统后台,以一种人机交互的方式实现功图的诊断识别整个过程方便简洁,即使不是技术人员也可以进行操作;
46、第二:将数据处理、和模型整合到一个平台中,是整过过程具有时效性,模型的参数可调如:学习率、迭代次数、投喂的批量尺寸,实现了对最优模型的寻找;
47、第三:用户可以根据不同的井下情况选区对应的模型进行训练、测试数据,根据不同的数据结果选择最优的模型进行测试;
48、第四:由于该系统还集成了基于识别器对抗的开放域自适应网络,包括特征生成器g和状态生成器f_1和f_2,特征生成器作为目标域的x_t的输入,获取的特征输入到状态生成器中即两个训练好的神经网络模型中,通过输出的维数判定目标故障,前十维为已知类型的故障,最后一维为新出现的故障,此种方法不仅节约了故障识别的时间而且可以识别目标故障是否为新出现的故障,具有较强的泛化能力。
- 还没有人留言评论。精彩留言会获得点赞!