钢轨廓形检测系统标定方法及装置与流程
本发明涉及钢轨廓形检测,尤其涉及一种钢轨廓形检测系统标定方法及装置。
背景技术:
1、本部分旨在为本发明实施例提供背景或上下文。此处的描述不因为包括在本部分中就承认是现有技术。
2、钢轨廓形检测系统是对钢轨全断面廓形进行高精度检测的测量设备。该设备一般由四组激光摄像组件组成,分别于左右钢轨的内外侧,获取激光平面与钢轨相交的图像,通过标定的参数,完成图像坐标系与世界坐标系的转换,获取钢轨全断面廓形在世界坐标系中的坐标。
3、图像标定是该系统精度的主要保证,目前关于轨廓系统图像标定常用的有基于棋盘格靶标的标定方法、基于针板靶标的标定方法等。这些方法均需操作人员多步操作,同时对于靶标位置与激光平面共面有着相当高的要求,在实际操作过程中,调节难度较大,现场操作比较耗时。
4、锯齿靶标相对以上技术,在标定过程中较为简便。但是现有的相关标定方法并不能够适应轨廓系统实际需求,主要体现在:(1)针对三维空间测量,仍需多步操作;(2)对于每侧相机均需进行一次标定操作,共需进行多次,仍不能很好适应现场需求。
技术实现思路
1、本发明实施例提供一种钢轨廓形检测系统标定方法,能够实现快速准确地确定钢轨廓形检测系统标定参数,简化操作,该方法包括:
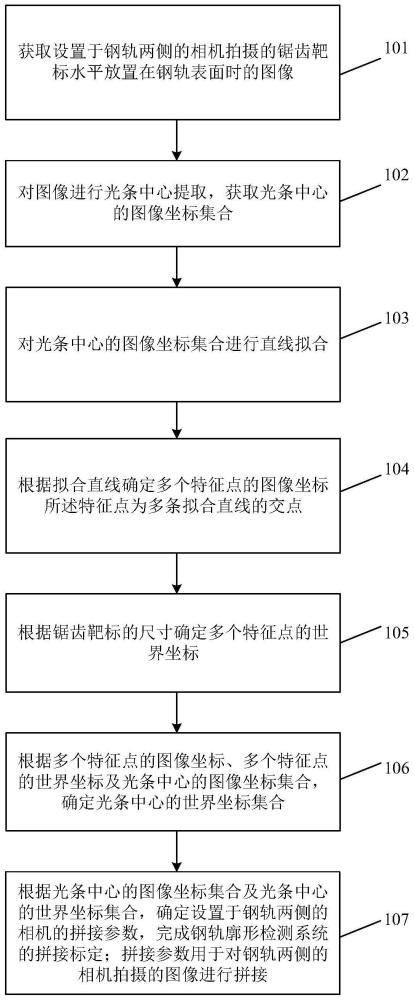
2、获取设置于钢轨两侧的相机拍摄的锯齿靶标水平放置在钢轨表面时的图像;
3、对图像进行光条中心提取,获取光条中心的图像坐标集合;
4、对光条中心的图像坐标集合进行直线拟合;
5、根据拟合直线确定多个特征点的图像坐标;所述特征点为多条拟合直线的交点;
6、根据锯齿靶标的尺寸确定多个特征点的世界坐标;
7、根据多个特征点的图像坐标、多个特征点的世界坐标及光条中心的图像坐标集合,确定光条中心的世界坐标集合;
8、根据光条中心的图像坐标集合及光条中心的世界坐标集合,确定设置于钢轨两侧的相机的拼接参数,完成钢轨廓形检测系统的拼接标定;拼接参数用于对钢轨两侧的相机拍摄的图像进行拼接。
9、本发明实施例提供一种钢轨廓形检测系统标定装置,能够实现快速准确地确定钢轨廓形检测系统标定参数,简化操作,该装置包括:
10、获取模块,用于获取设置于钢轨两侧的相机拍摄的锯齿靶标水平放置在钢轨表面时的图像;
11、提取模块,用于对图像进行光条中心提取,获取光条中心的图像坐标集合;
12、拟合模块,用于对光条中心的图像坐标集合进行直线拟合;
13、特征点确定模块,用于根据拟合直线确定多个特征点的图像坐标;所述特征点为多条拟合直线的交点;
14、特征点世界坐标确定模块,用于根据锯齿靶标的尺寸确定多个特征点的世界坐标;
15、世界坐标集合确定模块,用于根据多个特征点的图像坐标、多个特征点的世界坐标及光条中心的图像坐标集合,确定光条中心的世界坐标集合;
16、标定模块,用于光条中心的图像坐标集合及光条中心的世界坐标集合,确定设置于钢轨两侧的相机的拼接参数,完成钢轨廓形检测系统的拼接标定;拼接参数用于对钢轨两侧的相机拍摄的图像进行拼接。
17、本发明实施例还提供一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述钢轨廓形检测系统标定方法。
18、本发明实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述钢轨廓形检测系统标定方法。
19、本发明实施例还提供一种计算机程序产品,所述计算机程序产品包括计算机程序,所述计算机程序被处理器执行时实现上述钢轨廓形检测系统标定方法。
20、本发明实施例与现有技术中基于棋盘格靶标的标定方法、基于针板靶标的标定方法的方案相比,通过获取设置于钢轨两侧的相机拍摄的锯齿靶标水平放置在钢轨表面时的图像;对图像进行光条中心提取,获取光条中心的图像坐标集合;对光条中心的图像坐标集合进行直线拟合;根据拟合直线确定多个特征点的图像坐标;所述特征点为多条拟合直线的交点;根据锯齿靶标的尺寸确定多个特征点的世界坐标;根据多个特征点的图像坐标、多个特征点的世界坐标及光条中心的图像坐标集合,确定光条中心的世界坐标集合;根据光条中心的图像坐标集合及光条中心的世界坐标集合,确定设置于钢轨两侧的相机的拼接参数,完成钢轨廓形检测系统的拼接标定;拼接参数用于对钢轨两侧的相机拍摄的图像进行拼接,能够实现快速准确地确定钢轨廓形检测系统标定参数,简化操作。
技术特征:
1.一种钢轨廓形检测系统标定方法,其特征在于,包括:
2.如权利要求1所述的方法,其特征在于,所述锯齿靶标的中心设置有钢轨轨头凹槽,两侧设置有相同级数、预设尺寸的锯齿,两侧锯齿与水平方向呈预设角度,锯齿靶标两端设置有定位槽。
3.如权利要求2所述的方法,其特征在于,所述锯齿靶标放置于钢轨轨头并处于水平位置;锯齿靶标位置两端的定位槽与钢轨廓形检测系统发射的激光线重合。
4.如权利要求1所述的方法,其特征在于,根据多个特征点的图像坐标、多个特征点的世界坐标及光条中心的图像坐标集合,确定光条中心的世界坐标集合,包括:
5.如权利要求4所述的方法,其特征在于,根据光条中心的图像坐标集合及光条中心的世界坐标集合,确定设置于钢轨两侧的相机的拼接参数,包括:
6.一种钢轨廓形检测系统标定装置,其特征在于,包括:
7.如权利要求6所述的装置,其特征在于,所述锯齿靶标的中心设置有钢轨轨头凹槽,两侧设置有相同级数、预设尺寸的锯齿,两侧锯齿与水平方向呈预设角度,锯齿靶标两端设置有定位槽。
8.如权利要求7所述的装置,其特征在于,所述锯齿靶标放置于钢轨轨头并处于水平位置;锯齿靶标位置两端的定位槽与钢轨廓形检测系统发射的激光线重合。
9.如权利要求6所述的装置,其特征在于,世界坐标集合确定模块,具体用于:
10.如权利要求9所述的装置,其特征在于,标定模块,具体用于:
11.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至5任一所述方法。
12.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现权利要求1至5任一所述方法。
13.一种计算机程序产品,其特征在于,所述计算机程序产品包括计算机程序,所述计算机程序被处理器执行时实现权利要求1至5任一所述方法。
技术总结
本发明公开了一种钢轨廓形检测系统标定方法及装置,该方法包括:获取设置于钢轨两侧的相机拍摄的锯齿靶标水平放置在钢轨表面时的图像;对图像进行光条中心提取,获取光条中心的图像坐标集合;对光条中心的图像坐标集合进行直线拟合;根据拟合直线确定多个特征点的图像坐标;所述特征点为多条拟合直线的交点;根据多个特征点的图像坐标和世界坐标完成单侧相机的标定;确定光条中心的世界坐标集合;根据光条中心的世界坐标集合,确定设置于钢轨两侧的相机的拼接参数,完成钢轨廓形检测系统的拼接标定;拼接参数用于对钢轨两侧的相机拍摄的图像进行拼接,本发明能够实现快速准确地确定钢轨廓形检测系统标定参数,简化操作。
技术研发人员:王宁,王胜春,王昊,王乐,刘俊博,戴鹏,方玥,郝晋斐,周谦,王凡,赵延峰,蒋曙光
受保护的技术使用者:中国铁道科学研究院集团有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!