一种用于拉力赛的成绩统计分析系统的制作方法
本发明涉及拉力赛,具体而言,涉及一种用于拉力赛的成绩统计分析系统。
背景技术:
1、拉力是英文rally的中文译音,又称“多日赛”,是汽车道路比赛项目之一,是参赛车辆按规定的平均速度、行驶路线、在规定的时间内到达分站点目标并完成车辆的检验维修的一项汽车道路比赛项目。
2、拉力赛是一种具有多种不同地形和路况的赛事,包括土路、沙地、雪地、泥泞的道路等,这意味着车手需要适应各种不同的赛道条件,不同的路况会对车辆的性能产生影响。例如,在泥泞或雪地上,车辆的抓地力会降低,驾驶更加困难。而在硬质道路上,车辆可能会更容易控制。
3、因此,不同的路况对车辆的成绩同样具有不同的影响,如何通过基于拉力赛成绩分析赛车表现,进而为赛车表现提供准确数据展示成为技术发展的新趋势。
技术实现思路
1、鉴于此,本发明提出了一种用于拉力赛的成绩统计分析系统,主要是为了解决如何通过基于拉力赛成绩分析赛车表现,进而为赛车表现提供准确数据展示的问题。
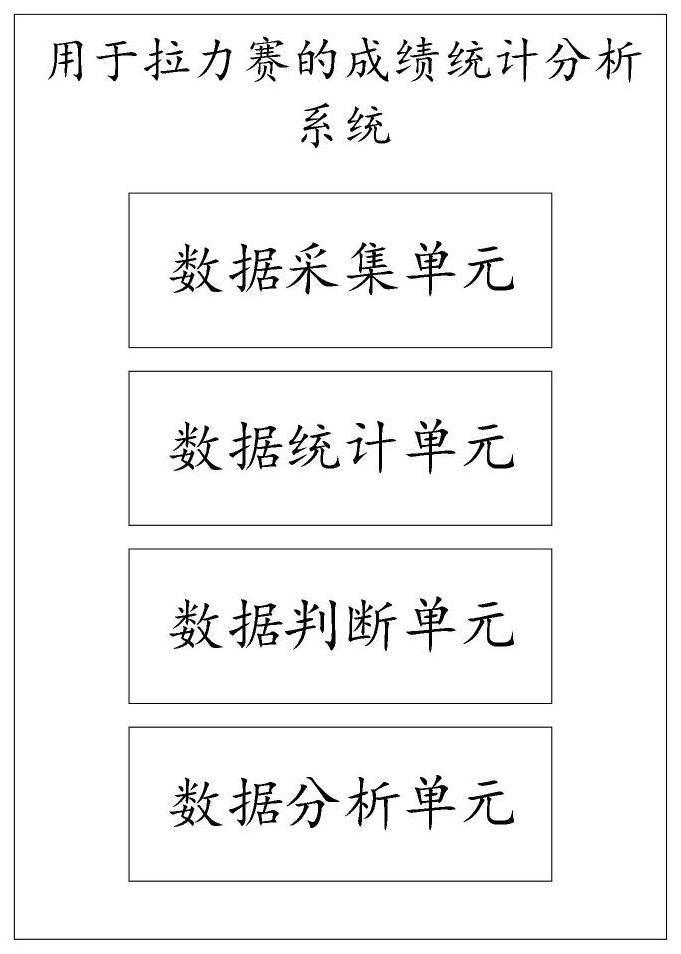
2、本发明提出了一种用于拉力赛的成绩统计分析系统,该系统包括:
3、数据采集单元,用于获取拉力赛中的赛段ai,i=1,2,…,n,以及赛段ai中待分析赛车的对应成绩数据bi,i=1,2,…,n,并根据获取的赛段ai获取对应赛段类型;
4、数据统计单元,用于当数据采集单元根据数据采集单元获取的赛段ai判断对应赛段类型后,获取赛段ai待分析赛车的对应的赛段成绩ci,i=1,2,…,n;
5、数据判断单元,用于当数据统计单元获取赛段ai待分析赛车的对应的赛段成绩ci后,根据赛段成绩ci判断是否建立赛段ai待分析赛车的对应的影响参数矩阵;
6、数据分析单元,用于在数据判断单元判断建立赛段ai待分析赛车的对应的影响参数矩阵后,获取赛段ai待分析赛车的对应的比赛过程数据,根据比赛过程数据建立赛车的影响参数矩阵,并将影响参数矩阵进行展示。
7、在本技术的一些实施例中,数据采集单元根据获取的赛段ai获取对应赛段类型时,包括:
8、预先设定赛段类型矩阵d(d1、d2),其中,d1为行驶赛段、d2为特殊赛段。
9、在本技术的一些实施例中,数据判断单元,用于当数据统计单元获取赛段ai待分析赛车的对应的赛段成绩ci后,根据赛段成绩ci判断是否建立赛段ai待分析赛车的对应的影响参数矩阵时,包括:
10、获取赛段ai对应的赛段类型di,i=1,2;
11、当di=d1时,数据判断单元判断根据赛段成绩ci对是否建立赛段ai待分析赛车的对应的影响参数矩阵进行二次判断;
12、当di=d2时,数据判断单元判断建立赛段ai待分析赛车的对应的影响参数矩阵。
13、在本技术的一些实施例中,数据判断单元判断根据赛段成绩ci对是否建立赛段ai待分析赛车的对应的影响参数矩阵进行二次判断时,包括:
14、当ci≠0时,数据判断单元判断建立赛段ai待分析赛车的对应的影响参数矩阵;
15、当ci=0时,数据判断单元判断不建立赛段ai待分析赛车的对应的影响参数矩阵。
16、在本技术的一些实施例中,数据判断单元判断建立赛段ai待分析赛车的对应的影响参数矩阵时,包括:
17、数据分析单元获取赛段ai待分析赛车的对应的比赛过程数据,其中,比赛过程数据包括:行驶路线距离、平均速度、地面能见度、路面摩擦系数;
18、预先设定影响参数矩阵zi(zi1、zi2、zi3、zi4),其中,zi1为行驶路线影响参数、zi2为行驶速度影响参数、zi3为地面能见度影响参数、zi4为路面摩擦系数影响参数;
19、预先设定行驶路线影响参数zi1=1;
20、获取赛段ai的对应的最短路线距离ei,i=1,2,…,n;
21、获取赛段ai待分析赛车的对应的行驶路线距离fi,i=1,2,…,n;
22、当fi>ei时,数据分析单元判断对行驶路线影响参数zi1进行调整,将行驶路线影响参数zi1作为行驶路线最终影响参数zi1a;
23、当fi≤ei时,数据分析单元判断不对行驶路线影响参数zi1进行调整。
24、在本技术的一些实施例中,当数据分析单元判断对行驶路线影响参数zi1进行调整时,包括:
25、预先设定行驶路线距离阈值矩阵g(g1、g2、g3、g4),其中,g1为第一预设行驶路线距离阈值、g2为第二预设行驶路线距离阈值、g3为第三预设行驶路线距离阈值、g4为第四预设行驶路线距离阈值,且g1>g2>g3>g4=ei;预先设定第一预设调整系数g1、第二预设调整系数g2、第三预设调整系数g3、第四预设调整系数g4,且0.8<g1<g2<0.9<g2<g1<1;
26、当fi>g1时,选定第一预设调整系数g1对行驶路线影响参数zi1进行调整,调整后的行驶路线影响参数为zi1*g1;
27、当g1≥fi>g2时,选定第二预设调整系数g2对行驶路线影响参数zi1进行调整,调整后的行驶路线影响参数为zi1*g2;
28、当g2≥fi>g3时,选定第三预设调整系数g3对行驶路线影响参数zi1进行调整,调整后的行驶路线影响参数为zi1*g3;
29、当g3≥fi>g4时,选定第四预设调整系数g4对行驶路线影响参数zi1进行调整,调整后的行驶路线影响参数为zi1*g4。
30、在本技术的一些实施例中,数据分析单元在选定第i预设调整系数gi对行驶路线影响参数zi1进行调整,i=1,2,3,4,获得调整后的行驶路线影响参数为zi1*gi后,还包括:
31、将调整后的行驶路线影响参数zi1*gi作为行驶路线最终影响参数zi1a;
32、获取通过赛段ai的历史行驶速度均值ha,其中,历史行驶速度均值ha为在历史一拉力赛中所有通过赛段ai的赛车的行驶速度均值,将所有赛车的行驶速度均值再做均值计算得到历史行驶速度均值ha;
33、预先设定行驶速度阈值矩阵h(h1、h2、h3、h4),其中,h1为第一预设行驶速度阈值、h2为第二预设行驶速度阈值、h3为第三预设行驶速度阈值、h4为第四预设行驶速度阈值,且h1>h2>ha>h3>h4;预先设定第一预设调整系数h1、第二预设调整系数h2、第三预设调整系数h3、第四预设调整系数h4,且1.1>h1>h2>1>h3>h4>0.9;
34、获取赛段ai待分析赛车的对应的行驶速度均值h0;
35、当h0≥h1时,选定第一预设调整系数h1对行驶速度影响参数zi2进行调整,调整后的行驶速度影响参数为zi2*h1;
36、当h1>h0≥h2时,选定第二预设调整系数h2对行驶速度影响参数zi2进行调整,调整后的行驶速度影响参数为zi2*h2;
37、当h2>h0≥h3时,选定第三预设调整系数h3对行驶速度影响参数zi2进行调整,调整后的行驶速度影响参数为zi2*h3;
38、当h3>h0≥h4时,选定第四预设调整系数h4对行驶速度影响参数zi2进行调整,调整后的行驶速度影响参数为zi2*h4。
39、在本技术的一些实施例中,数据分析单元在选定第i预设调整系数hi对行驶速度影响参数zi2进行调整,i=1,2,3,4,获得调整后的行驶速度影响参数为zi2*hi后,还包括:
40、将调整后的行驶速度影响参数为zi2*hi作为行驶速度最终影响参数zi2a;
41、获取赛段ai的地面能见度k0;
42、预先设定地面能见度阈值矩阵k(k1、k2、k3、k4),其中,k1为第一预设地面能见度阈值、k2为第二预设地面能见度阈值、k3为第三预设地面能见度阈值、k4为第四预设地面能见度阈值,且k1>k2>k3>k4;预先设定第一预设调整系数k1、第二预设调整系数k2、第三预设调整系数k3、第四预设调整系数k4,且0.8<k1<k2<0.9<k2<k1<1;
43、当k0≥k1时,选定第一预设调整系数k1对地面能见度影响参数zi3进行调整,调整后的地面能见度影响参数为zi3*k1;
44、当k1>k0≥k2时,选定第二预设调整系数k2对地面能见度影响参数zi3进行调整,调整后的地面能见度影响参数为zi3*k2;
45、当k2>k0≥k3时,选定第三预设调整系数k3对地面能见度影响参数zi3进行调整,调整后的地面能见度影响参数为zi3*k3;
46、当k3>k0≥k4时,选定第四预设调整系数k4对地面能见度影响参数zi3进行调整,调整后的地面能见度影响参数为zi3*k4。
47、在本技术的一些实施例中,数据分析单元在选定第i预设调整系数ki对地面能见度影响参数zi3进行调整,i=1,2,3,4,获得调整后的地面能见度影响参数为zi3*ki后,还包括:
48、将调整后的地面能见度影响参数zi3*ki作为地面能见度最终影响参数zi3a;
49、获取赛段ai的路面摩擦系数l0;
50、预先设定路面摩擦系数阈值矩阵l(l1、l2、l3、l4),其中,l1为第一预设路面摩擦系数阈值、l2为第二预设路面摩擦系数阈值、l3为第三预设路面摩擦系数阈值、l4为第四预设路面摩擦系数阈值,且l1>l2>l3>l4;预先设定第一预设调整系数l1、第二预设调整系数l2、第三预设调整系数l3、第四预设调整系数l4,且0.8<l1<l2<0.9<l2<l1<1;
51、当l0≥l1时,选定第一预设调整系数l1对路面摩擦系数影响参数zi4进行调整,调整后的路面摩擦系数影响参数为zi4*l1;
52、当l1>l0≥l2时,选定第二预设调整系数l2对路面摩擦系数影响参数zi4进行调整,调整后的路面摩擦系数影响参数为zi4*l2;
53、当l2>l0≥l3时,选定第三预设调整系数l3对路面摩擦系数影响参数zi4进行调整,调整后的路面摩擦系数影响参数为zi4*l3;
54、当l3>l0≥l4时,选定第四预设调整系数l4对路面摩擦系数影响参数zi4进行调整,调整后的路面摩擦系数影响参数为zi4*l4。
55、在本技术的一些实施例中,数据分析单元在选定第i预设调整系数li对路面摩擦系数影响参数zi4进行调整,i=1,2,3,4,获得调整后的路面摩擦系数影响参数为zi4*li后,还包括:
56、将调整后的路面摩擦系数影响参数zi4*li作为路面摩擦系数最终影响参数zi4a;
57、根据行驶路线最终影响参数zi1a、行驶速度最终影响参数zi2a、地面能见度最终影响参数zi3a、路面摩擦系数最终影响参数zi4a得到赛段ai待分析赛车的对应的最终影响参数矩阵zia(zi1a、zi2a、zi3a、zi4a),并将最终影响参数矩阵zia(zi1a、zi2a、zi3a、zi4a)进行展示。
58、与现有技术相比,本发明存在以下有益效果:本发明首先通过收集拉力赛中各个赛段ai,包括待分析赛车的成绩数据bi以及赛段类型,获得赛段ai待分析赛车的对应赛段成绩ci,,利用赛段成绩ci来判断是否需要建立赛段ai待分析赛车的影响参数矩阵,根据具体需求进行自动化决策,以节省时间和资源,在确定需要建立影响参数矩阵后,数据分析单元会获取赛段ai待分析赛车的比赛过程数据,并基于这些数据建立赛车的影响参数矩阵,帮助了解赛车在不同赛段的表现,展示影响参数矩阵,以便团队、车手或决策者能够更好地理解赛车性能和赛段特点,通过分析影响参数矩阵,可以了解到赛车在不同赛段上的强项和弱项,以制定更好的策略和改进赛车性能,系统的数据采集和分析能力可以帮助车队进行更深入的数据驱动分析,以改进赛车性能和战略,同时自动化分析建立影响参数矩阵有助于提高效率和减少人为错误。
- 还没有人留言评论。精彩留言会获得点赞!