数据处理方法及系统、电子设备、计算机可读存储介质与流程
本公开涉及数据处理,特别涉及一种数据处理方法及系统、电子设备、计算机可读存储介质。
背景技术:
1、为了对地图数据进行及时更新,如何基于当前版本的地图数据发现某一个迭代时间段内现实世界变化更新的要素,一直是各个地图厂商需要不断解决的重要问题。
2、现有技术中,依靠地图厂商的采集设备在城市内不断巡航采集到的差分数据生成的道路区域变化信息,由于受到采集设备的成本和数量限制,只能识别出有限的变化点。而普通驾驶车辆数量多,行驶区域覆盖广,数据检测频次高,是优质的变化检测数据源。因此,如果依托普通驾驶车辆检测发生变化的区域位置,再由专业的采集车辆等采集设备对发生变化的区域进行实地数据采集更新,可以极大地减少区域变化的发现成本同时提升地图更新的质量和频次。
3、然而,由于测绘资质、地理信息安全以及个人隐私保护等原因,普通驾驶车辆所检测到的数据还无法直接提供给地图厂商用于变化区域发现检测。因此,如何在满足测绘资质、合规、数据安全、隐私保护等需求的前提下获取尽可能多的用于更新地图的数据源,是本领域亟待解决的难题。
4、现有技术虽然还不能将普通驾驶车辆检测到的数据直接提供给地图厂商用于变化区域发现检测,但现有技术已经能够通过线下交通信息网站与专业测绘车巡航相结合的方式来获取地图数据的变化更新信息,以弥补单纯依靠专业采集设备获取区域变化更新信息的不足。
5、然而,现有技术通过线下交通信息网站与专业测绘车巡航相结合获取地图变化更新信息的方式仍然存在数据获取局限、延迟性高、成本高昂以及更新有限等问题,具体表现在:
6、1、由于只有成片的区域更新才会出现在线下交通信息网站上,因此,通过线下交通信息网站只能获取成片的区域更新信息,而无法获取城市中海量分散要素的变化信息,造成了数据获取方面的局限性。
7、2、由于线下交通信息网站包括的区域更新信息通常是人工录入得到的,因此,其区域更新信息的发布时间往往具有很大的延时性和不确定性。
8、3、由于专业测绘车的单辆成本高昂,因此,若要使专业测绘车的巡航范围覆盖足够多的区域,则需要配置数量足够多的专业测绘车在相关区域进行巡航,导致了通过专业测绘车巡航获取地图变化更新信息方式的总体成本高昂。
9、4、因为专业测绘车的成本问题,通过专业测绘车巡航获取地图变化更新信息的方式只能覆盖部分城市的主要区域,从而导致专业测绘车巡航范围之外发生变化需要更新的大量区域常常因为无法及时被发现而得不到有效更新。
技术实现思路
1、本公开旨在至少解决现有技术中存在的问题之一,提供一种数据处理方法及系统、电子设备、计算机可读存储介质。
2、本公开的一个方面,提供了一种数据处理方法,所述数据处理方法包括:
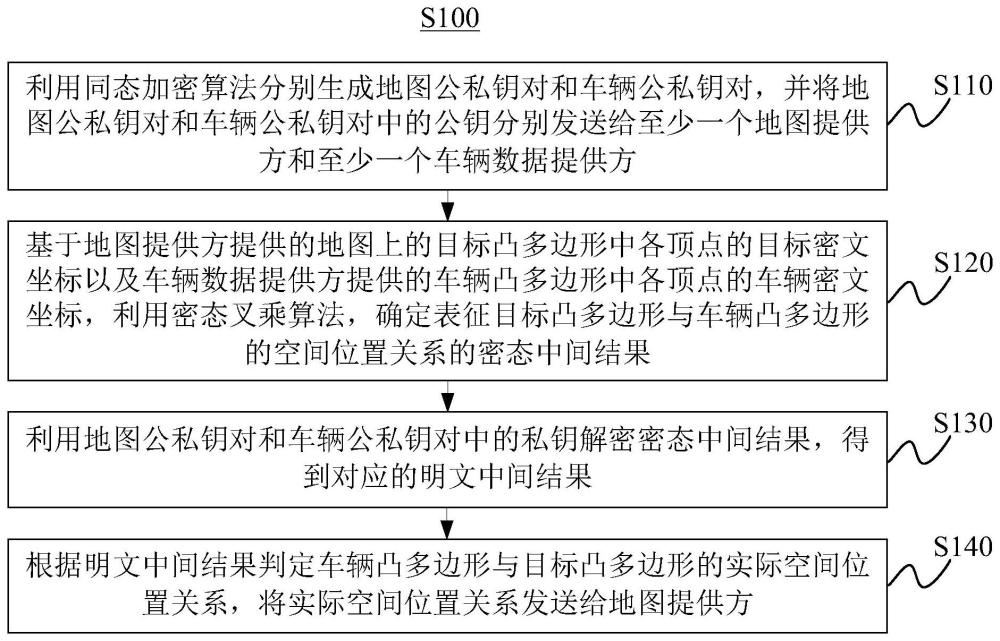
3、利用同态加密算法分别生成地图公私钥对和车辆公私钥对,并将所述地图公私钥对和所述车辆公私钥对中的公钥分别发送给至少一个地图提供方和至少一个车辆数据提供方;
4、基于所述地图提供方提供的地图上的目标凸多边形中各顶点的目标密文坐标以及所述车辆数据提供方提供的车辆凸多边形中各顶点的车辆密文坐标,利用密态叉乘算法,确定表征所述目标凸多边形与所述车辆凸多边形的空间位置关系的密态中间结果;
5、利用所述地图公私钥对和所述车辆公私钥对中的私钥解密所述密态中间结果,得到对应的明文中间结果;
6、根据所述明文中间结果判定所述车辆凸多边形与所述目标凸多边形的实际空间位置关系,将所述实际空间位置关系发送给所述地图提供方。
7、可选地,所述基于所述地图提供方提供的地图上的目标凸多边形中各顶点的目标密文坐标以及所述车辆数据提供方提供的车辆凸多边形中各顶点的车辆密文坐标,利用密态叉乘算法,确定表征所述目标凸多边形与所述车辆凸多边形的空间位置关系的密态中间结果,包括:
8、将所述目标凸多边形和所述车辆凸多边形中的一者作为待判定凸多边形,另一者作为参照凸多边形;
9、基于所述目标密文坐标和所述车辆密文坐标,利用所述密态叉乘算法,分别确定所述待判定凸多边形中的各顶点与所述参照凸多边形中各条边的密文位置关系式;
10、根据所述密文位置关系式,确定表征所述目标凸多边形与所述车辆凸多边形的空间位置关系的所述密态中间结果。
11、可选地,所述基于所述目标密文坐标和所述车辆密文坐标,利用所述密态叉乘算法,分别确定所述待判定凸多边形中的各顶点与所述参照凸多边形中各条边的密文位置关系式,包括:
12、分别将所述参照凸多边形中按照预设顺序连接的各条边对应的边向量的起点作为各个待判定向量的起点,并分别将所述待判定凸多边形中的各顶点作为各所述待判定向量的终点,基于所述目标密文坐标和所述车辆密文坐标,确定各所述边向量和各所述待判定向量分别对应的向量密态坐标;
13、根据所述向量密态坐标,分别确定所述待判定凸多边形中每个顶点对应的预设条件下的密态叉乘表达式;所述预设条件下的密态叉乘表达式用于指示左手坐标系或右手坐标系下采用叉乘法判断所述待判定凸多边形中各个顶点分别与所述参照凸多边形中各条边的位置关系的表达式;;
14、分别将所述待判定凸多边形中每个顶点对应的所述预设条件下的各个所述密态叉乘表达式进行与运算,得到所述待判定凸多边形中的每个顶点分别对应的所述密文位置关系式。
15、可选地,所述根据所述密文位置关系式,确定表征所述目标凸多边形与所述车辆凸多边形的空间位置关系的所述密态中间结果,包括:
16、将所述待判定凸多边形中的各顶点对应的所述密文位置关系式进行与运算,得到所述密态中间结果。
17、可选地,所述根据所述明文中间结果判定所述车辆凸多边形与所述目标凸多边形的实际空间位置关系,包括:
18、根据所述明文中间结果在所述左手坐标系或所述右手坐标系中的对应含义,确定所述实际空间位置关系;所述实际空间位置关系包括所述车辆凸多边形包含所述目标凸多边形、所述车辆凸多边形与所述目标凸多边形部分相交、所述车辆凸多边形与所述目标凸多边形相离中的任意一者。
19、可选地,所述目标凸多边形用于指示所述地图提供方提供的路面标识目标区域,各所述目标密文坐标由所述地图提供方利用所述地图公私钥对中的公钥对所述目标凸多边形中各顶点的明文坐标进行同态加密得到;
20、所述车辆凸多边形用于指示所述车辆数据提供方识别出的与所述路面标识目标区域相对应的路面标识实际区域,各所述车辆密文坐标由所述车辆数据提供方利用所述车辆公私钥对中的公钥对所述车辆凸多边形中各顶点的明文坐标进行同态加密得到。
21、可选地,在将所述实际空间位置关系发送给所述地图提供方之后,所述数据处理方法还包括:
22、在所述车辆数据提供方有多个时,若各个所述车辆数据提供方提供的所述车辆凸多边形对应的所述实际空间位置关系表明各所述车辆凸多边形均与所述目标凸多边形没有交集,则更新所述地图。
23、本公开的另一个方面,提供了一种数据处理系统,所述数据处理系统包括:
24、密钥生成模块,用于利用同态加密算法分别生成地图公私钥对和车辆公私钥对,并将所述地图公私钥对和所述车辆公私钥对中的公钥分别发送给至少一个地图提供方和至少一个车辆数据提供方;
25、确定模块,用于基于所述地图提供方提供的地图上的目标凸多边形中各顶点的目标密文坐标以及所述车辆数据提供方提供的车辆凸多边形中各顶点的车辆密文坐标,利用密态叉乘算法,确定表征所述目标凸多边形与所述车辆凸多边形的空间位置关系的密态中间结果;
26、解密模块,用于利用所述地图公私钥对和所述车辆公私钥对中的私钥解密所述密态中间结果,得到对应的明文中间结果;
27、判定模块,用于根据所述明文中间结果判定所述车辆凸多边形与所述目标凸多边形的实际空间位置关系,将所述实际空间位置关系发送给所述地图提供方。
28、可选地,所述确定模块,用于基于所述地图提供方提供的地图上的目标凸多边形中各顶点的目标密文坐标以及所述车辆数据提供方提供的车辆凸多边形中各顶点的车辆密文坐标,利用密态叉乘算法,确定表征所述目标凸多边形与所述车辆凸多边形的空间位置关系的密态中间结果,包括:
29、所述确定模块,用于:
30、将所述目标凸多边形和所述车辆凸多边形中的一者作为待判定凸多边形,另一者作为参照凸多边形;
31、基于所述目标密文坐标和所述车辆密文坐标,利用所述密态叉乘算法,分别确定所述待判定凸多边形中的各顶点与所述参照凸多边形中各条边的密文位置关系式;
32、根据所述密文位置关系式,确定表征所述目标凸多边形与所述车辆凸多边形的空间位置关系的所述密态中间结果。
33、可选地,所述确定模块,用于基于所述目标密文坐标和所述车辆密文坐标,利用所述密态叉乘算法,分别确定所述待判定凸多边形中的各顶点与所述参照凸多边形中各条边的密文位置关系式,包括:
34、所述确定模块,用于:
35、分别将所述参照凸多边形中按照预设顺序连接的各条边对应的边向量的起点作为各个待判定向量的起点,并分别将所述待判定凸多边形中的各顶点作为各所述待判定向量的终点,基于所述目标密文坐标和所述车辆密文坐标,确定各所述边向量和各所述待判定向量分别对应的向量密态坐标;
36、根据所述向量密态坐标,分别确定所述待判定凸多边形中每个顶点对应的预设条件下的密态叉乘表达式;所述预设条件下的密态叉乘表达式用于指示左手坐标系或右手坐标系下采用叉乘法判断所述待判定凸多边形中各个顶点分别与所述参照凸多边形中各条边的位置关系的表达式;
37、分别将所述待判定凸多边形中每个顶点对应的所述预设条件下的各个所述密态叉乘表达式进行与运算,得到所述待判定凸多边形中的每个顶点分别对应的所述密文位置关系式。
38、可选地,所述确定模块,用于根据所述密文位置关系式,确定表征所述目标凸多边形与所述车辆凸多边形的空间位置关系的所述密态中间结果,包括:
39、所述确定模块,用于将所述待判定凸多边形中的各顶点对应的所述密文位置关系式进行与运算,得到所述密态中间结果。
40、可选地,所述判定模块,用于根据所述明文中间结果判定所述车辆凸多边形与所述目标凸多边形的实际空间位置关系,包括:
41、所述判定模块,用于根据所述明文中间结果在所述左手坐标系或所述右手坐标系中的对应含义,确定所述实际空间位置关系;所述实际空间位置关系包括所述车辆凸多边形包含所述目标凸多边形、所述车辆凸多边形与所述目标凸多边形部分相交、所述车辆凸多边形与所述目标凸多边形相离中的任意一者。
42、可选地,所述目标凸多边形用于指示所述地图提供方提供的路面标识目标区域,各所述目标密文坐标由所述地图提供方利用所述地图公私钥对中的公钥对所述目标凸多边形中各顶点的明文坐标进行同态加密得到;
43、所述车辆凸多边形用于指示所述车辆数据提供方识别出的与所述路面标识目标区域相对应的路面标识实际区域,各所述车辆密文坐标由所述车辆数据提供方利用所述车辆公私钥对中的公钥对所述车辆凸多边形中各顶点的明文坐标进行同态加密得到。
44、可选地,所述数据处理系统还包括:
45、地图更新模块,用于在所述车辆数据提供方有多个时,若各个所述车辆数据提供方提供的所述车辆凸多边形对应的所述实际空间位置关系表明各所述车辆凸多边形均与所述目标凸多边形没有交集,则更新所述地图。
46、本公开的另一个方面,提供了一种电子设备,包括:
47、至少一个处理器;以及,
48、与至少一个处理器通信连接的存储器;其中,
49、存储器存储有可被至少一个处理器执行的指令,指令被至少一个处理器执行,以使至少一个处理器能够执行前文记载的数据处理方法。
50、本公开的另一个方面,提供了一种计算机可读存储介质,存储有计算机程序,计算机程序被处理器执行时实现前文记载的数据处理方法。
51、本公开实施例相对于现有技术而言,充分利用全同态加密支持数据在密态形式下进行四则运算的能力,将全同态加密技术引入在轨迹数据处理过程,可在车辆识别数据安全可控的条件下基于车辆识别数据和地图数据进行凸多边形的空间关系计算,判别真实世界和地图数据的变化区域,实现了同态加密环境下车辆识别数据和地图数据的联合差分检测,有效解决了地图数据变化发现检测艰难、成本大、延时性大、检测区域有限等问题,可完全替换地图厂商使用交通信息网站或各自有限的测绘车进行巡航来进行地图数据变化发现检测的方式。
- 还没有人留言评论。精彩留言会获得点赞!