一种近地面障碍物数据库构建及可视化方法与流程
本发明属于障碍物数据库构建及可视化领域,涉及一种近地面障碍物数据库构建及可视化方法。
背景技术:
1、直升机在近地面机动飞行的需求日益迫切,为实现安全可靠近地面机动飞行,直升机近地面避障、近地视觉告警等是重点研究方向。作为这些研究方向中根本和重要的环节之一,近地面障碍物数据库构建及可视化方法也被广泛研究。
2、飞行安全是民用航空追求的核心目标。根据波音公司统计,从2004年到2013年的十年间,在世界范围内,几乎一半的航空事故的主要原因为是低能见度条件下,飞行员丧失关于地形和障碍物的情景意识,导致的可控飞行撞地。
3、针对上述问题,上海航空电器有限公司申请的专利cn110019268a提出一种基于障碍物数据库的直升机机载电线防撞方法。该障碍物数据库中对于线缆类障碍物依次编号存储,并依次连线各线缆类障碍物,抽象出线缆告警包线,建立线缆告警区,实现直升机针对线缆类障碍物的防撞。但该专利提出的方法实现线缆告警的前提是准确检测出线缆障碍物,并且该专利提出的方法将线缆类障碍物依次编号存储,并依次连线各线缆类障碍物,无法很好地应对网状关联结构。
4、输电杆塔为关联障碍物的典型代表。虽然输电线路工程的三维数字化和智能电网工作在大力推进,但三维数字地图中存在输电杆塔不全,线路模型欠缺且不易表征的问题。
技术实现思路
1、本发明的目的:本文提出的障碍物数据库构建方法针对有关联的障碍物抽象出关联属性,并给出关联属性构建和可视化方法。针对现有障碍物数据库技术中障碍物目标多为独立物体或集群物体,对于独立分散但有关联的障碍物未能加以构建的问题,提出一种近地面障碍物数据库构建及可视化方法,通过增加障碍物关联属性,表征有关联的障碍物之间的线性、网状关联。关联属性中的潜在关联对机载传感器检测到新的关联障碍物,但关联不清晰的情况加以记录,结合航线信息,以虚线包围盒形式呈现视觉告警,解决了无关联属性的障碍物数据库无法进行潜在风险提醒的问题。例如传统基于输电线路识别检测进行视觉告警存在恶劣环境下的漏检线路无告警情况。
2、本发明的技术方案:
3、一种近地面障碍物数据库构建及可视化方法,步骤如下:
4、步骤一:起飞前,加载近地面障碍物数据库,并在直升机当前显示地图画面上叠加障碍物方位包围盒;
5、步骤二:在飞行过程中,根据地图画面显示区域实时更新当前显示地图画面和其上叠加的障碍物方位包围盒,并计算直升机与障碍物方位包围盒的相对距离,根据相对距离的不同将障碍物方位包围盒显示为不同的颜色,用以标识障碍物对直升机的威胁等级;
6、步骤三:在飞行过程中,利用传感器采集直升机周围环境数据,根据直升机位置姿态识别周围环境中是否存在新的障碍物,若存在,则将新发现的障碍物更新至近地面障碍物数据库中,返回步骤二,否则直接返回步骤二。
7、进一步,所述步骤一中,近地面障碍物数据库分为两部分,一部分根据三维数字地图提取或人工编辑形成,记为地面库og;另一部分在飞行过程中根据机载传感器检测得到,记为飞行库of。
8、进一步,所述地面库和飞行库中均记录有多个障碍物单元组,每个障碍物单元组由表中所示属性组成:
9、
10、
11、进一步,所述步骤一中,所述方位包围盒为根据障碍物单元组中的障碍物中心点经纬度、海拔高度、绝对方位角、长度、宽度和高度属性生成的矩形框。
12、进一步,所述步骤二中,在航线首次飞行时,近地面障碍物数据库为空;通过在三维数字地图中提取或者人工编辑在近地面障碍物数据库添加障碍物单元组。
13、进一步,所述步骤一中,航线重复飞行时,使用前一次飞行完成后的近地面障碍物数据库。
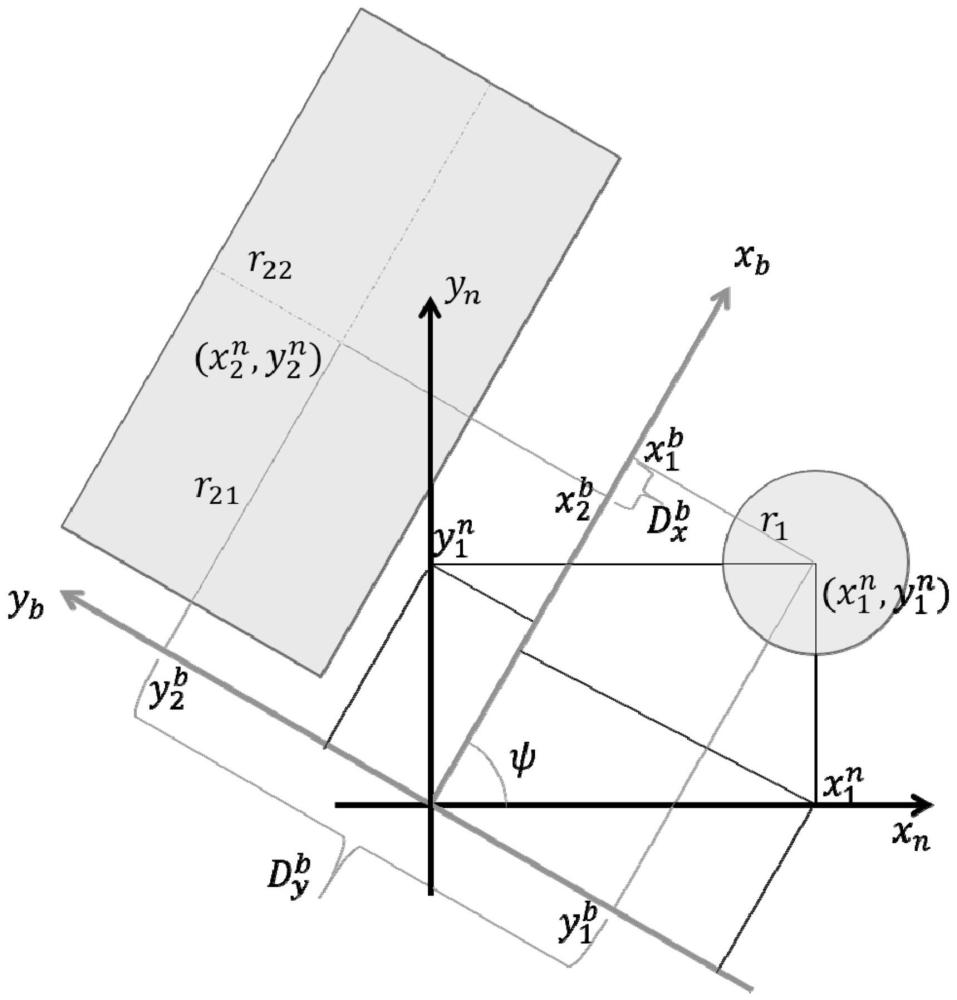
14、进一步,所述步骤二中,可直接根据直升机与障碍物方位包围盒的三维坐标直接计算相对距离。也可通过计算直升机与障碍物方位包围盒在x、y、z轴三轴方向上的相对距离,计算过程如下:
15、定义b系为障碍物坐标系,n系为地理坐标系,
16、和分别为直升机、障碍物中心在n系下的位置坐标,r1为直升机安全球型半径,r21、r22、r23表示障碍物方位包围盒三个轴向的1/2边长,ψ表示障碍物方位包围盒的方位角;
17、定义为障碍物坐标系下,z轴向上直升机与障碍物的相对距离,
18、
19、定义分别为障碍物坐标系下,x轴向、y轴向上直升机与障碍物的相对距离,定义为n系下坐标转换为b系坐标的旋转矩阵,其值可由方位角计算得到,
20、
21、那么,直升机和障碍物在b系的位置坐标为:
22、
23、
24、则分别为,
25、
26、
27、根据x轴向、y轴向、z轴向上直升机与障碍物的相对距离和确定障碍物方位包围盒的颜色。
28、进一步,取x轴向、y轴向、z轴向上直升机与障碍物的相对距离和中的最大值为dcolor,
29、根据dcolor确定障碍物方位包围盒的颜色。
30、根据三轴方向上相对距离最大者确定障碍物方位包围盒的颜色,因为直升机与障碍物只要在某一个轴向上有足够距离,则不会发生碰撞风险。
31、进一步,所述步骤二中,当dcolor不超过d1时,将障碍物方位包围盒显示为最醒目的颜色,等级最高;
32、当dcolor大于d1但是不超过d2时,将障碍物方位包围盒显示为较为醒目的颜色,等级较高;
33、当dcolor超过d2时,将障碍物方位包围盒显示为非醒目颜色,等级最低。
34、进一步,d1取值范围为20米至50米;d2取值范围为200米至500米;
35、最醒目的颜色为红色或紫红色或粉红色;
36、较为醒目的颜色为黄色或棕色或褐色;
37、非醒目颜色为绿色或蓝色。
38、优选地,d1为30米,d2为300米。
39、进一步,所述步骤三中,周围环境中是否存在新的障碍物识别过程如下:
40、步骤三a:通过机载视觉传感器获取周围环境的视觉图片,通过机载激光雷达获取周围环境的激光雷达点云数据;
41、步骤三b:根据直升机位置姿态和视觉传感器安装角,将地面库中直升机当前所在位置周围环境的障碍物方位包围盒投影至视觉图片中,形成图片蒙版;
42、步骤三c:在图片蒙版中,使用yolo算法对图片蒙版进行障碍物目标检测及分割,获取新障碍物o1并识别出o1的障碍物类别;
43、步骤三d:基于周围环境的激光雷达点云数据,通过open3d点云直通滤波算法,求取新障碍物o1的包围盒;
44、步骤三e:将o1的包围盒与飞行库中的障碍物包围盒的位置、方位对比;
45、步骤三f:若飞行库中不存在新障碍物o1相同的包围盒,则将新障碍物o1更新至飞行库中,并更新近地面障碍物数据库中与新障碍物o1类别相同障碍物的关联属性。
46、进一步,所述步骤三c中,所述障碍物类别分为三类,第一类为在飞行前已经识别到的无关联障碍物的障碍物,包括:山体、林地、集中建筑群、独立建筑物、机场、桥梁、烟囱、风车;
47、第二类为在飞行中识别到的无关联障碍物的障碍物,包括:起重机/塔吊、大型车辆、灯塔/桩;
48、第三类为在飞行中识别到的有关联障碍物的障碍物,包括:杆/塔、航空器、威胁目标;
49、有关联的障碍物分为明确关联和潜在关联;
50、明确关联指:障碍物类别相同且存在实体连接关系或存在通信、合作关系;
51、潜在关联指:障碍物类别相同。
52、进一步,所述步骤三f中,关联属性更新过程如下:
53、s1:寻找新障碍物半径为r的地理范围内的同一类别的障碍物,记为障碍物o2;
54、s2:判断障碍物o2的关联障碍物数量与明确关联障碍物id数量是否相同,若相同,则无需更新关联属性;否则,将障碍物o2和新障碍物o1更新为互为潜在关联;
55、s3:直至遍历完新障碍物半径为r的地理范围内的同一类别的所有障碍物;
56、s4:若在飞行过程中,通过机载传感器检测,明确障碍物o2和新障碍物o1之间存在关联,则将障碍物o2和新障碍物o1的关联属性由潜在关联更新为明确关联。
57、进一步,所述步骤二中,还包括:显示关联属性方位包围盒,过程如下:
58、步骤301:获取地图画面显示区域,确定近地面障碍物数据库o中位于地图画面显示区域内的障碍物子集,记为od,以及位于地图画面显示区域内的关联障碍物子集,记为or;
59、步骤302:计算障碍物子集od中各个障碍物方位包围盒与直升机之间的相对距离;并确定各个障碍物方位包围盒的显示颜色;
60、步骤303:所述关联属性方位包围盒连接有关联的两个障碍物方位包围盒。
61、通过关联属性方位包围盒将有关联的两个障碍物方位包围盒连接,体现关联关系,同时避免由于飞行员仅考虑障碍物而忽略关联属性导致危险的发生。如两个有电线连接的电塔等等,仅仅显示电塔而不显示电线,显然是不合适的。
62、进一步,关联属性方位包围盒的颜色为两端相连接的两个障碍物方位包围盒中等级较高者的颜色。颜色跟随等级较高者,因为距离越近,威胁越大。
63、进一步,若两个障碍物的关联属性为明确关联,则连接两个障碍物方位包围盒的关联属性方位包围盒为实线;若两个障碍物的关联属性为潜在关联,则连接两个方位包围盒的关联属性方位包围盒为虚线。
64、通过实现和虚线区分明确关联和潜在关联的关联属性方位包围盒,以体现关联等级的不同,便于飞行员区分、
65、进一步,关联属性方位包围盒包括四条线,分别用于连接两个障碍物靠近飞行器一侧两个端面的四个顶点。通过四条线,仅连接两个障碍物方位包围盒最近的两个端面,简洁高效且避免画面太过杂乱。
66、进一步,连接两个潜在关联障碍物的关联属性方位包围盒仅在飞行航线与关联属性方位包围盒有交叉时显示。仅在航线与潜在关联的关联属性方位包围盒相交时才显示关联属性方位包围盒,节约计算资源,同时避免显示画面繁乱。
67、进一步,地图画面显示区域根据画面显示中心位置和地图缩放比例得到;画面显示中心位置为直升机当前位置或飞行员指定位置。
68、根据画面显示中心位置确定地图画面显示区域中心点,根据屏幕大小和地图缩放比例,从而确定在地图画面显示区域中显示的实际地图范围大小。
69、飞行员可通过输入坐标范围或者直接触摸屏幕选择想要查看的地图范围,从而指定显示位置,并且可以设置地图缩放比例,从而使得可以在地图画面显示区域显示不同位置、不同大小的地图及障碍物方位包围盒。
70、一种近地面障碍物数据库,所述数据库通过所述的近地面障碍物数据库构建及可视化方法进行构建和可视化显示。
71、一种飞行器,所述飞行器用于实施所述的方法,所述飞行器包括:综合处理计算机、存储器、显示器、传感器;
72、所述存储器用于存储近地面障碍物数据库;
73、所述传感器用于采集直升机周围环境数据;
74、所述综合处理计算机用于执行权利要求1-9中任一项所述的方法;
75、所述显示器用于显示地图画面并在地图画面上叠加显示障碍物方位包围盒。
76、本发明的有益效果:本发明提出了一种近地面障碍物数据库构建及可视化方法。在障碍物属性中增加关联属性,关联属性描述了独立分散障碍物之间存在联系的现象。关联属性规定了关联障碍物数量,记录了明确关联障碍物id和潜在关联障碍物id。潜在关联使未明确检测到关联前输出提示信息成为可能。本发明通过直升机飞行前加载和飞行中检测提取障碍物信息,构建障碍物数据库,通过障碍物方位包围盒实现障碍物属性信息在地图画面的可视化叠加显示,通过计算直升机与障碍物方位包围盒之间相对距离设置方位包围盒颜色,实现视觉告警。
- 还没有人留言评论。精彩留言会获得点赞!