相机标定方法、对象定位方法、装置和电子设备与流程
本发明涉及视觉定位,尤其是涉及一种相机标定方法、对象定位方法、装置和电子设备。
背景技术:
1、基于视觉的对象定位技术中,通常需要预先对相机进行标定。标定过程需要使用棋盘格等标定工具,通过拍摄多张包含棋盘格的图像,并结合相机的内外参数,可以标定得到图像内每个像素点的深度信息,标定操作过程较为复杂,且计算量大,进而导致定位过程同样复杂。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种相机标定方法、对象定位方法、装置和电子设备,以简化标定过程,降低计算量,优化定位流程。
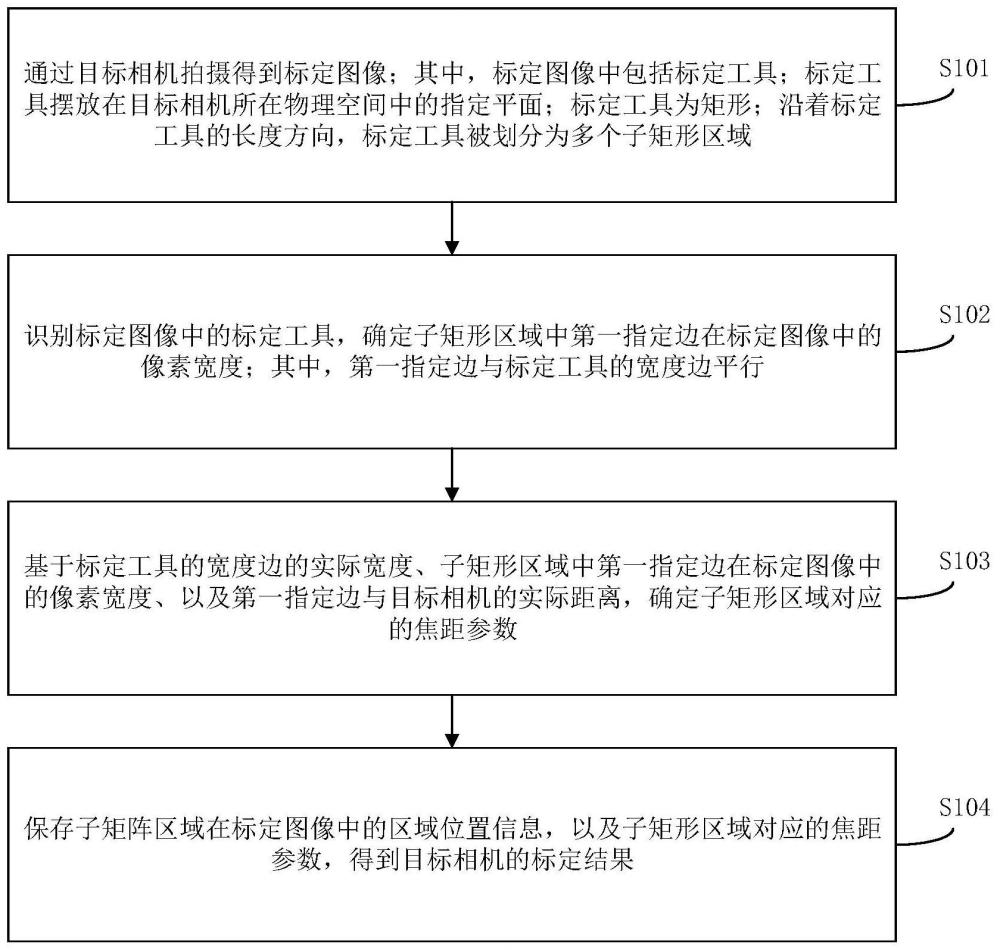
2、第一方面,本发明实施例提供了一种相机标定方法,该方法包括:通过目标相机拍摄得到标定图像;其中,标定图像中包括标定工具;标定工具摆放在目标相机所在物理空间中的指定平面;标定工具为矩形;沿着标定工具的长度方向,标定工具被划分为多个子矩形区域;识别标定图像中的标定工具,确定子矩形区域中第一指定边在标定图像中的像素宽度;其中,第一指定边与标定工具的宽度边平行;基于标定工具的宽度边的实际宽度、子矩形区域中第一指定边在标定图像中的像素宽度、以及第一指定边与目标相机的实际距离,确定子矩形区域对应的焦距参数;保存子矩阵区域在标定图像中的区域位置信息,以及子矩形区域对应的焦距参数,得到目标相机的标定结果。
3、上述标定工具的长度方向的中心线经过目标相机在指定平面的投影点,且中心线的延伸方向,为目标相机的朝向在指定平面上的投影方向。
4、上述识别标定图像中的标定工具,确定子矩形区域中第一指定边在标定图像中的像素宽度的步骤,包括:通过语义分割模型识别并提取标定图像中的标定工具,得到提取结果;其中,提取结果中,标定工具所在的图像区域为第一像素值,除标定工具所在的图像区域以外的图像区域为第二像素值;对提取结果进行线段检测,得到标定工具中线段两端的像素坐标;基于标定工具中线段两端的像素坐标,确定子矩形区域中第一指定边在标定图像中的像素宽度。
5、上述对提取结果进行线段检测,得到标定工具中线段两端的像素坐标的步骤之后,上述方法还包括:从标定工具中线段两端的像素坐标中,获取子矩形区域的顶点坐标,将顶点坐标确定为子矩阵区域在标定图像中的区域位置信息。
6、上述按照距离目标相机由近及远的方向,多个子矩形区域依次排列;基于标定工具的宽度边的实际宽度、子矩形区域中第一指定边在标定图像中的像素宽度、以及第一指定边与目标相机的实际距离,确定子矩形区域对应的焦距参数的步骤之前,上述方法还包括:确定子矩形区域的排列顺序;基于排列顺序和子矩形区域的第二指定边的实际长度,确定第一指定边与目标相机的实际距离;其中,第二指定边与第一指定边垂直。
7、上述基于标定工具的宽度边的实际宽度、子矩形区域中第一指定边在标定图像中的像素宽度、以及第一指定边与目标相机的实际距离,确定子矩形区域对应的焦距参数的步骤,包括:确定子矩形区域中第一指定边在标定图像中的像素宽度,与第一指定边与目标相机的实际距离的乘积结果;将乘积结果与标定工具的宽度边的实际宽度的比值,确定为子矩形区域对应的焦距参数。
8、第二方面,本发明实施例提供了一种对象定位方法,该方法包括:通过目标相机拍摄得到定位图像;其中,定位图像中包括目标对象;目标相机预置有标定结果,标定结果通过相机标定方法得到;目标对象位于目标相机所在物理空间中的指定平面上;指定平面预设有坐标系;识别定位图像中的目标对象,确定目标对象在定位图像中的对象像素位置;基于标定结果确定对象像素位置对应的目标子矩形区域,并确定目标子矩形区域对应的目标焦距参数;基于目标焦距参数、标定工具的宽度边的实际宽度、以及目标子矩形区域中第一指定边在标定图像中的像素宽度,确定对象像素位置映射至坐标系的第一维度坐标;在定位图像中的标定工具上确定基准点,并确定基准点在坐标系中的映射点;基于基准点和映射点,确定对象像素位置映射至坐标系的第二维度坐标;基于第一维度坐标和第二维度坐标,确定目标对象在坐标系下的对象定位位置。
9、上述坐标系的原点为目标相机在指定平面的投影点,坐标系的第一维度轴的方向,为目标相机的朝向在指定平面上的投影方向,坐标系的第二维度轴与第一维度轴垂直。
10、上述识别定位图像中的目标对象,确定目标对象在定位图像中的对象像素位置的步骤,包括:通过目标检测算法检测定位图像中的目标对象,得到检测结果;其中,检测结果包括:位于定位图像上的矩形框,矩形框包围目标对象;将矩形框的底边中心点的位置,确定为目标对象在定位图像中的对象像素位置。
11、上述基于标定结果确定对象像素位置对应的目标子矩形区域的步骤,包括:基于标定结果中,子矩阵区域在标定图像中的区域位置信息,在定位图像中确定子矩阵区域的区域位置;将对象像素位置所在的区域位置对应的子矩阵区域,确定为目标子矩形区域。
12、上述基于目标焦距参数、标定工具的宽度边的实际宽度、以及目标子矩形区域中第一指定边在标定图像中的像素宽度,确定对象像素位置映射至坐标系的第一维度坐标的步骤,包括:确定标定工具的宽度边的实际宽度,与目标子矩形区域中第一指定边在标定图像中的像素宽度的比值;将比值与目标焦距参数的乘积,确定为对象像素位置映射至坐标系的第一维度坐标。
13、上述在定位图像中的标定工具上确定基准点,并确定基准点在坐标系中的映射点的步骤,包括:在定位图像中的标定工具上确定第一基准点和第二基准点,第一基准点、第二基准点和对象像素位置位于同一直线上;直线与标定工具的宽度边平行;基于标定结果,确定第一基准点在坐标系中的第一映射点,以及第二基准点在坐标系中的第二映射点。
14、上述基于基准点和映射点,确定对象像素位置映射至坐标系的第二维度坐标的步骤,包括:将对象像素位置、第一基准点和第二基准点之间的相对位置,确定为对象定位位置、第一映射点和第二映射点之间的相对位置;基于相对位置、第一映射点和第二映射点,确定对象像素位置映射至坐标系的第二维度坐标。
15、第三方面,本发明实施例提供了一种相机标定装置,该装置包括:第一拍摄模块,用于通过目标相机拍摄得到标定图像;其中,标定图像中包括标定工具;标定工具摆放在目标相机所在物理空间中的指定平面;标定工具为矩形;沿着标定工具的长度方向,标定工具被划分为多个子矩形区域;第一识别模块,用于识别标定图像中的标定工具,确定子矩形区域中第一指定边在标定图像中的像素宽度;其中,第一指定边与标定工具的宽度边平行;第一确定模块,用于基于标定工具的宽度边的实际宽度、子矩形区域中第一指定边在标定图像中的像素宽度、以及第一指定边与目标相机的实际距离,确定子矩形区域对应的焦距参数;第一保存模块,用于保存子矩阵区域在标定图像中的区域位置信息,以及子矩形区域对应的焦距参数,得到目标相机的标定结果。
16、第四方面,本发明实施例提供了一种对象定位装置,该装置包括:第二拍摄模块,用于通过目标相机拍摄得到定位图像;其中,定位图像中包括目标对象;目标相机预置有标定结果,标定结果通过第三方面的相机标定装置得到;目标对象位于目标相机所在物理空间中的指定平面上;指定平面预设有坐标系;第二识别模块,用于识别定位图像中的目标对象,确定目标对象在定位图像中的对象像素位置;第二确定模块,用于基于标定结果确定对象像素位置对应的目标子矩形区域,并确定目标子矩形区域对应的目标焦距参数;基于目标焦距参数、标定工具的宽度边的实际宽度、以及目标子矩形区域中第一指定边在标定图像中的像素宽度,确定对象像素位置映射至坐标系的第一维度坐标;第三确定模块,用于在定位图像中的标定工具上确定基准点,并确定基准点在坐标系中的映射点;基于基准点和映射点,确定对象像素位置映射至坐标系的第二维度坐标;第四确定模块,用于基于第一维度坐标和第二维度坐标,确定目标对象在坐标系下的对象定位位置。
17、第五方面,本发明实施例提供了一种电子设备,该设备包括处理器和存储器,存储器存储有能够被处理器执行的机器可执行指令,处理器执行机器可执行指令以实现上述相机标定方法,或者上述对象定位方法。
18、第六方面,本发明实施例提供了一种机器可读存储介质,该机器可读存储介质存储有机器可执行指令,机器可执行指令在被处理器调用和执行时,机器可执行指令促使处理器实现上述相机标定方法或对象定位方法。
19、本发明实施例带来了以下有益效果:
20、上述提供了一种相机标定方法、对象定位方法、装置和电子设备,其中,相机标定方法包括:通过目标相机拍摄得到标定图像;其中,标定图像中包括标定工具;标定工具摆放在目标相机所在物理空间中的指定平面;标定工具为矩形;沿着标定工具的长度方向,标定工具被划分为多个子矩形区域;识别标定图像中的标定工具,确定子矩形区域中第一指定边在标定图像中的像素宽度;其中,第一指定边与标定工具的宽度边平行;基于标定工具的宽度边的实际宽度、子矩形区域中第一指定边在标定图像中的像素宽度、以及第一指定边与目标相机的实际距离,确定子矩形区域对应的焦距参数;保存子矩阵区域在标定图像中的区域位置信息,以及子矩形区域对应的焦距参数,得到目标相机的标定结果。该方式中,在物理空间中放置矩形的标定工具,且该标定工具划分为多个子矩形区域;通过目标相机拍摄得到包含标定工具的标定图像,再识别标定图像中的标定工具,进而确定子矩形区域对应的焦距参数,保存区域位置信息和焦距参数,得到标定结果,该方式提供的相机标定过程简单,且计算量小,易于操作。
21、进一步的,上述对象定位方法包括:通过目标相机拍摄得到定位图像;其中,定位图像中包括目标对象;目标相机预置有标定结果,标定结果通过相机标定方法得到;目标对象位于目标相机所在物理空间中的指定平面上;指定平面预设有坐标系;识别定位图像中的目标对象,确定目标对象在定位图像中的对象像素位置;基于标定结果确定对象像素位置对应的目标子矩形区域,并确定目标子矩形区域对应的目标焦距参数;基于目标焦距参数、标定工具的宽度边的实际宽度、以及目标子矩形区域中第一指定边在标定图像中的像素宽度,确定对象像素位置映射至坐标系的第一维度坐标;在定位图像中的标定工具上确定基准点,并确定基准点在坐标系中的映射点;基于基准点和映射点,确定对象像素位置映射至坐标系的第二维度坐标;基于第一维度坐标和第二维度坐标,确定目标对象在坐标系下的对象定位位置。该方式中,首先通过目标相机拍摄得到定位图像,再识别定位图像中的目标对象,确定目标对象在定位图像中的对象像素位置,进而根据多个参数确定坐标系的第一维度坐标和第二维度坐标,得到对象定位位置,通过设置标定工具的方式,构建指定平面上的坐标系,动态选取相应的理论焦距,以简单的方式实现目标对象的准确定位,且定位计算量较低,优化了定位流程。
22、本发明的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
23、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!