基于最优语义分割的复杂虚拟轨迹目标点提取方法及系统
本发明属于网络空间信息服务,具体涉及一种基于最优语义分割的复杂虚拟轨迹目标点提取方法及系统。
背景技术:
1、公共地图服务平台汇集了海量空间信息,为公众提供数据共享服务,例如天地图、google地图和高德地图等。目前公共地图服务平台已广泛深入公共安全、水利、交通等领域的众多应用,催生了海量用户的个性化需求。但地图服务商尚无法主动准确感知用户对地理信息的偏好,难以满足用户个性化需求,导致需求-服务低效配置。如何精准高效地“理解用户想要什么”成为当前公共地图服务平台亟待解决的瓶颈问题。基于公共地图服务平台用户访问时空过程形成的虚拟轨迹,准确挖掘表征用户访问兴趣的目标点,对于主动深入理解用户潜在需求,支撑地图服务用户画像构建,促进需求-服务高效匹配,降低地图服务商运行经济成本,提高精细化运行水平具有重要意义。
2、已有学者开展了关于公共地图服务平台中宏观时空行为的用户访问兴趣规律的分析与建模研究,例如基于必应地图、百度地图和天地图分析用户访问行为的时间分布、空间分布和要素分布规律,从时空统计的角度描述用户的访问兴趣,并在此基础上,基于时间序列模型、回归模型建模用户行为的时空偏好,支撑公共地图服务平台性能优化、商店位置选择和感兴趣区域挖掘。
3、近年来,已有学者认识到用户访问公共地图服务平台的行为是时空过程,提出将虚拟轨迹作为微观时空行为的表达形式。针对用户访问地图瓦片形成的虚拟轨迹,提出基于层级空间密度差异的hgmm(hierarchical gaussian mixture model)模型,通过对轨迹点迭代聚类的方法,建模虚拟轨迹的金字塔空间结构。有学者提出经验性假设“层级放大表示访问兴趣增加,层级缩小表示访问兴趣减小”,利用hgmm模型提取表征访问兴趣极大值的目标点。虽然hgmm模型针对单一金子塔空间结构的虚拟轨迹建模效果较好,目标点提取精度较高,但是当虚拟轨迹长度增加,复杂度也会增加,多重金字塔空间结构的叠加,导致层级空间密度差异不显著,严重限制了目标点提取的效率和精度。因此,亟待构建针对复杂虚拟轨迹的时空模型和目标点提取方法。
技术实现思路
1、现有技术基于虚拟轨迹的金字塔空间结构识别目标点,忽视了用户访问过程中的时序关联,且没有考虑到复杂虚拟轨迹中多重金字塔叠加的空间结构复杂性,导致目标点提取效率和精度低下。本发明针对上述问题,提出基于最优语义分割的复杂虚拟轨迹目标点提取方法及系统,在时间维度对复杂虚拟轨迹进行最优语义分割,形成空间结构简单的子轨迹,进而利用子轨迹进行目标点提取,有效提升目标点提取的效率和精度。
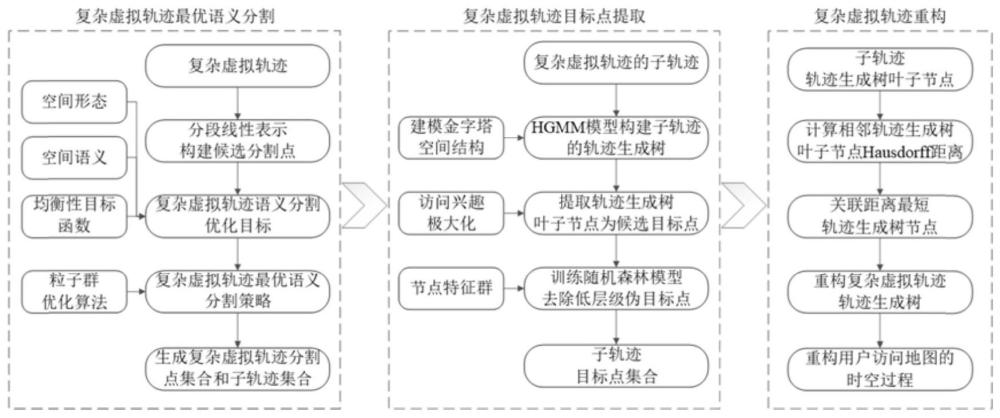
2、本发明提供一种基于最优语义分割的复杂虚拟轨迹目标点提取方法,包括以下步骤:
3、步骤1,对复杂虚拟轨迹进行最优语义分割;
4、步骤1.1,对公共地图服务平台中用户访问地图时空过程形成的复杂虚拟轨迹,利用分段线性表示法提取表征兴趣极小化的层级序列极小值,构建候选分割点集合;
5、步骤1.2,根据复杂虚拟轨迹的空间形态和空间语义特征,定义均衡性目标函数作为复杂虚拟轨迹语义分割优化的目标;
6、步骤1.3,根据最优语义分割策略,从复杂虚拟轨迹的候选分割点集合中筛选最优分割点集合,并计算分割后的均衡性目标函数值,然后基于粒子群优化算法找到最优语义分割策略的最佳参数组合,生成复杂虚拟轨迹分割点集合和子轨迹集合;
7、步骤2,复杂虚拟轨迹的目标点提取;
8、步骤2.1,利用hgmm模型,遍历步骤1.3中子轨迹构建轨迹生成树;
9、步骤2.2,针对轨迹生成树中节点构建特征群,通过人工判别筛选真伪目标点,利用特征群和人工标注的标签训练随机森林模型精准识别目标点;
10、步骤3,计算步骤2中子轨迹的轨迹生成树节点之间的hausdorff距离,通过节点之间的空间相邻关系将轨迹生成树连接,建立目标点之间的时空关联关系,重构用户访问地图的时空过程。
11、而且,所述步骤1.1中利用轨迹点数量作为虚拟轨迹复杂度的衡量指标,将虚拟轨迹划分为简单虚拟轨迹trajs与复杂虚拟轨迹trajc,具体定义如下:
12、
13、式中,pi=(loni,lati,layeri,ti),0≤i≤n,pi表示轨迹点,loni表示经度,lati表示纬度,layeri表示层级,ti表示时间,δ为设定的阈值。
14、将复杂虚拟轨迹的最优分割问题看作为从轨迹trajc中选取轨迹点子集z=<pi,…,pj〉,把z中的轨迹点作为最优分割点。为保证分割后子轨迹金字塔空间结构不被破坏,从层级序列x=<(t1,layer1),…,(ti,layeri),…,(tn,layern)>的极小值中选取复杂虚拟轨迹的分割点,其中层级序列x仅考虑每个轨迹点的时间ti和层级layeri,忽略经纬度loni和lati。利用分段线性表示法对复杂虚拟轨迹的层级序列x进行噪声去除和轨迹简化,具体实施步骤为:
15、①连接层级序列x的首尾轨迹点形成直线,分别计算x中除首尾轨迹点外其他轨迹点(ti,layeri)到该直线的正交距离,具体计算方式如下:
16、
17、式中,a、b、c分别为层级序列x首尾两轨迹点所在直线的标准方程系数;
18、②计算①中所有轨迹点的正交距离集合d=<d1,d2,…,dn-2〉,取最大距离值dmax,若dmax≤ω,则以层级序列的首尾轨迹点连线近似表示原始序列,若dmax>ω,则基于dmax对应的轨迹点将层级序列x划分为两个子序列xleft与xright,其中n为轨迹点的个数,ω为超参数;
19、③分别对子序列xleft与xright重复①-②的计算过程,当所有子序列满足dmax≤ω或子序列中仅有首尾轨迹点时,迭代结束;
20、④保留上述迭代过程中剩余轨迹点得到序列x*,即保留迭代过程中序列形态特征的所有子序列首尾轨迹点,序列x*为序列x的简化轨迹,去除了小幅波动的中间轨迹点,其中x*∈x;
21、⑤提取序列x*中层级属性极小值对应的轨迹点,构成候选分割点集合s。
22、而且,所述步骤1.2中定义累计层级梯度值clg作为子轨迹空间形态指标,具体计算方式如下:
23、
24、式中,r表示子轨迹中轨迹点的个数,layeri表示任意轨迹点的层级,|layeri+1-layeri|表示相邻两个轨迹点的层级梯度。
25、clg越大,子轨迹长度越长,且金字塔空间结构完整性概率越大,定义clg>α时,子轨迹金字塔空间结构具有较好的完整性,其中α为优化参数。
26、定义目标点空间语义指标mam和mim,其中mam表示所有候选分割点中层级最高的分割点,即所有子轨迹的首尾轨迹点中层级最高的轨迹点:
27、mam=max(<τ1,…,τi,…,τk〉) (4)
28、式中,k表示候选分割点集合s中分割点的数量,τi为任意分割点的层级。
29、候选分割点取自于复杂虚拟轨迹的极小值点,极小值点的层级越低,其破坏金字塔结构的概率越小,因此当满足mam<β,能够达到较好分割效果,β为优化参数。
30、mim表示所有子轨迹层级极大值点中的最小值,即先找出每条子轨迹首尾轨迹点中层级较大的那个点,得到单条子轨迹的层级极大值,然后在所有子轨迹层级极大值中找出最小值,具体表示如下:
31、mim=min(<σ1,…,σi,…,σq〉) (5)
32、式中,q为子轨迹中层级极大值点的个数,σi为任意层级极大值点。
33、层级极大值点越大,成为目标点的概率越大,层级极大值点越小,越倾向于成为普通轨迹点,因此当满足mim>θ,能够使每个子轨迹存在目标点,θ为优化参数。
34、定义所有子轨迹点数量方差作为轨迹分割的目标函数,以充分考虑子轨迹轨迹点数量的均衡性,目标函数计算方式如下:
35、
36、式中,f(α,β,θ)为目标函数,k表示复杂轨迹的分割点数量,ri表示任意子轨迹的轨迹点数量,表示所有子轨迹点数量的均值。
37、目标函数f(α,β,θ)越小,表明子轨迹之间复杂度越均衡。
38、而且,所述步骤1.3中根据最优语义分割策略,从步骤1.1得到的候选分割点集合s中筛选最优分割点集合z,具体步骤如下:
39、①计算轨迹trajc的候选分割点集合s的mam指标,筛选满足条件mam<β的候选分割点集合其中s1∈s;
40、②遍历s1中的候选分割点对轨迹trajc进行分割,得到子轨迹集合k1表示集合s1中的分割点数量,依次计算子轨迹straji的clg指标值,若clg>α,则保留子轨迹straji,若clg≤α,则合并子轨迹straji和straji+1,删除两轨迹间的分割点pi,并计算合并子轨迹的clg指标,直至clg>α,保留对应的候选分割点,循环迭代上述判断合并操作直至遍历s1中所有候选分割点,形成保留的候选分割点集合其中s2∈s1;
41、③遍历s2中的候选分割点对轨迹trajc进行分割,得到子轨迹集合k2表示集合s2中的分割点数量,依次计算子轨迹straji的mim指标,若mim>θ,则保留子轨迹若mim≤θ,则合并子轨迹和删除两轨迹间的分割点并计算合并子轨迹的mim指标,直至mim>θ,则保留对应的候选分割点,循环迭代此判断合并操作直至遍历s2中所有候选分割点,形成最优分割点集合z,其中z∈s2。
42、由于不同的参数组合<α,β,θ>会产生不同轨迹分割效果,且子轨迹的均衡性目标函数f(α,β,θ)也不同,因此将复杂虚拟轨迹语义分割优化问题转化为参数最优化问题。粒子群优化算法在解空间中寻求最优解,对于每条轨迹,执行上述最优语义分割策略,每迭代执行一次策略,得到一个最优分割点集合z,进而计算分割后的f(α,β,θ)值,在此基础上调整参数组合<α,β,θ>,使下一次迭代结果中f(α,β,θ)更小,直至收敛或到达迭代次数上限。为了更快寻找到最优解,设置n个粒子同时进行迭代运算,假设每一组参数<α,β,θ>为一个粒子,α,β,θ表示其位置坐标,随机初始化每个粒子的参数,每个粒子具有随机初始移动速度,迭代过程中每个粒子产生一个位置值用来表示本次迭代后该粒子所在位置是否接近于最优参数,产生一个速度值用来表示下一次迭代时该粒子的移动速度与方向,分别定义如下:
43、
44、
45、式中,γ表示当前迭代次数;分别表示第γ次、第γ-1次迭代后第h个粒子的位置;分别表示经过γ次、γ-1次迭代后第h个粒子在下一次迭代时的移动速度;μ表示时间步长;表示到第γ次迭代为止,第h个粒子的局部最优解;gbestγ表示到第γ次迭代为止,n个粒子的全局最优解;w为速度惯性因子,c1与c2为权重参数;如果ρ次迭代结果的gbestγ不变,或者达到最大迭代次数γ,则迭代计算终止。
46、而且,所述步骤2.1中利用hgmm模型对子轨迹的所有轨迹点进行迭代聚类,构建描述子轨迹金字塔空间结构的轨迹生成树,其中轨迹生成树中每个节点都由一类轨迹点组成。hgmm模型假设轨迹生成树叶子节点中的所有轨迹点都为表示访问兴趣极大化的候选目标点,所有子轨迹的目标点共同构成整个复杂虚拟轨迹的候选目标点。
47、而且,所述步骤2.2中轨迹生成树的叶子节点中存在轨迹点层级分布低、空间分布稀疏、覆盖范围广的节点,它们的访问目标不明确,将其定义为伪目标点。对轨迹生成树中的每个节点构建特征群,包括节点中轨迹点的最小层级、最大层级、平均层级、最小经度、最大经度、平均经度、最小纬度、最大纬度、平均纬度、轨迹点数目、轨迹点空间密度、是否为叶子节点、轨迹生成树节点深度、迭代次数,同时通过人工判别的方式,为每个节点打标签,判别真伪目标点,进而利用特征群和标签训练随机森林模型,以便利用模型自动去除伪目标点,实现目标点精准识别。
48、而且,所述步骤3中叶子节点leafa到leafb的hausdorff距离定义如下:
49、h(leafa,leafb)=max{max(min||pa,pb||),max(min||pb,pa||)} (9)
50、式中,pa表示叶子节点leafa的轨迹点,pb表示叶子节点leafb中的轨迹点,||pa,pb||表示pa与pb之间的欧氏距离,h(leafa,leafb)表示hausdorff距离。
51、本发明还提供一种基于最优语义分割的复杂虚拟轨迹目标点提取系统,用于实现如上所述的一种基于最优语义分割的复杂虚拟轨迹目标点提取方法。
52、而且,包括处理器和存储器,存储器用于存储程序指令,处理器用于调用存储器中的程序指令执行如上所述的一种基于最优语义分割的复杂虚拟轨迹目标点提取方法。
53、或者,包括可读存储介质,所述可读存储介质上存储有计算机程序,所述计算机程序执行时,实现如上所述的一种基于最优语义分割的复杂虚拟轨迹目标点提取方法。
54、与现有技术相比,本发明具有如下优点:
55、1)对复杂虚拟轨迹进行最优语义分割,在时间维度将复杂虚拟轨迹分割为结构简单的子轨迹,降低轨迹点数量和空间结构复杂性;2)基于子轨迹建模复杂虚拟轨迹空间结构,结合人工判别经验知识,提高目标点提取效率和精度;3)针对分割形成的独立子轨迹,提出复杂虚拟轨迹重构方法,建立目标点之间的时空关联关系,重构用户访问地图的时空过程;4)本发明方案实施简单方便,实用性强,解决了相关技术存在的实用性低及实际应用不便的问题,能够提高用户体验,具有重要的市场价值。
- 还没有人留言评论。精彩留言会获得点赞!