一种多因素影响下语义等级的因素值域空间划分方法
本发明涉及对象聚类分析,特别是涉及多因素影响下,为对象集合的聚类提供不同语义等级的因素值域空间划分,提供了一种多因素影响下语义等级的因素值域空间划分方法。
背景技术:
1、对系统运行情况进行研究时通常采用评价等方法确定系统功能状态。作为基础数据,以目标-对象-因素-划分组成的数据结构是实现系统功能状态研究的重要基础。目标是系统希望实现的功能或达到的状态;对象是系统运行过程中在某时刻实例化产生的对象;因素是影响系统功能状态变化的原因,也是标定系统功能状态进而形成对象的关键。针对目标一般会有多种语义对系统功能状态是否与目标一致进行描述,这些描述具有不同的语义等级,可根据这些语义等级对对象集合进行聚类分析。关键在于多因素影响下,如何对因素的值域进行划分从而满足不同语义等级对因素值域的要求。这也是最终实现对象聚类分析的关键所在。但由于客观原因使得因素的各语义等级值域划分不准确,且语义划分要适合于人的主观直觉。目前主要是通过人的经验分析确定不同语义等级对应的因素值域,或是通过简单的因素值域范围进行确定,均带有主观性。因实现合理的聚类分析,相较于目标、对象和因素,不同语义等级的因素值域划分更为重要。
2、目前关于对象聚类、语义等级及因素值域划分的研究逐渐增加。这些研究对各类系统和数据类型提出了多种聚类分析方法,并研究了不同语义等级的划分。这些成果为类似问题的解决提供了有益尝试。但研究中的目标、对象、因素和划分多是预先规定的,在此基础上对对象进行聚类分析。各语义等级对应的因素值域也是确定的。但由于因素之间的相关性等问题导致各等级语义的因素值域划分不恰当。
3、为解决上述问题,本发明提出可基于对象在因素空间的分布来确定各语义等级的因素值域划分。首先构建因素空间并投影对象,其次确定最优语义等级数,然后根据该聚类数进行聚类分析,最后获得不同语义等级值域在因素空间中的分布情况。从而为多因素影响下,对象集合的聚类提供不同语义等级的因素值域空间划分方法。
技术实现思路
1、本发明的目的在于提供多因素影响下语义等级的因素值域空间划分方法,以解决现有技术中的语义等级的因素值域划分不当的问题。
2、本发明提供了一种多因素影响下语义等级的因素值域空间划分方法,为满足多因素影响下根据预定目标的对象集合聚类要求,提出该方法;首先将对象映射到因素空间,其次确定最优语义等级数,再次对对象集合进行聚类分析,最后形成各语义等级的因素值域空间;实现对象集合的聚类分析需要构建目标-对象-因素-划分的数据结构;聚类数为最优语义等级数,使用calinski-harabasz(ch)指数确定,使用多维k-mean聚类方法实现;聚类数取决于最大calinski-harabasz指数和人的直觉,为大于3的奇数;用于多因素影响下,对象集合的聚类提供不同语义等级的因素值域空间划分方法;
3、确定针对目标和对象集合的聚类数是完成方法的前提;聚类数必须与人的直觉对应,聚类数应该是最优的语义等级数,使用calinski-harabasz指数来确定聚类数;
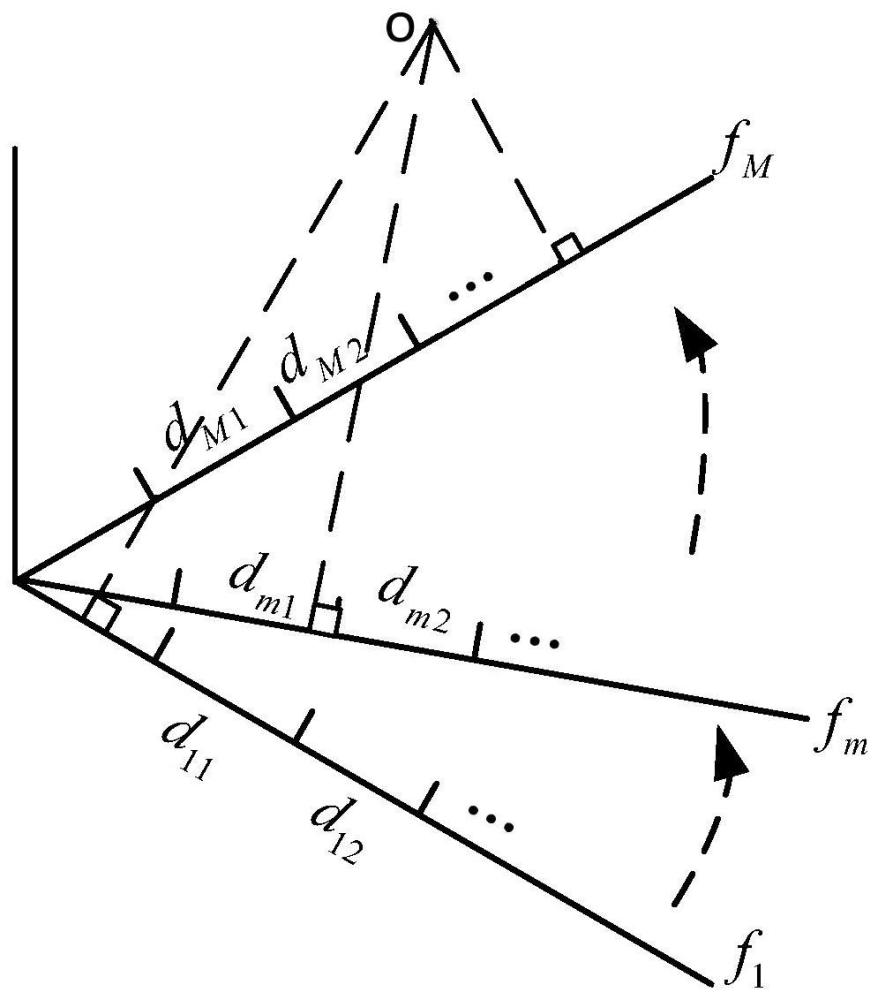
4、设影响系统功能状态的因素集合为f={f1,…,fm},fm∈f,m=1,…,m,m为因素数量;针对目标的各因素语义等级数集合为l={l1,…,lm},lm是因素fm的语义等级数;对fm划分的语义等级集合为所有因素的值域集合为d={d1,…,dm};因素fm对应各语义等级划分的值域集合为因素fm对应各语义等级的值域分别为系统实例化对象集合为o={o1,…,on},on∈o,n=1,…,n,n为对象数量;就因素fm的语义等级对对象集合o进行划分,得的lm个集合;代表qm类中对象的数量,qm=1,…,lm;
5、calinski-harabasz指数是评价类内对象距离关系和类间对象距离关系的综合指数,calinski-harabasz指数的计算如式(1)所示;
6、
7、其中:oob是类间方差,如式(2)所示;ooi是类内方差,如式(3)所示;
8、
9、
10、式中:qm是第qm类,qm=1,…,lm;是qm类的对象总数;co是所有对象在因素空间中的中心点;是qm类对象在因素空间中的中心;是qm类所有对象的集合;
11、最优分类数为进一步考虑人的直觉对分类的影响;人对于对象的分类一般有三种处理方式;与目标对比,对象状态与目标要求相同的类别,与目标相反的类别,以及与目标关系不确定的类别;三支决策描述为接受对象、不确定的对象和不接受的对象,因此语义等级数应大于等于3;同时对多分类情况,基于集对分析思想,确定性分类包括与目标相同和相反两种,以及在他们之间的不确定情况;在直觉上的多级分类实际上是对不确定部分的对象再分类,以确定不确定分类中对象的不确定程度;将不确定对象继续划分为偏向接受的对象,偏向不接受的对象,以及仍然不确定的对象;这就形成了五级的语义等级划分;因此直觉上语义等级数量应该是大于3的奇数;结合上述观点,最终得到的最优语义等级数量如式(4)所示,这也是聚类分析的聚类数;
12、
13、语义等级的因素值域划分;确定了最优语义等级数olm,利用多维k-mean聚类进行对象聚类分析,进而形成语义等级的因素值域空间划分;设所有因素的语义等级数l1=l2=…=lm均为olm;确定在olm下,各类集合中的对象和对象数量;设olm个类的对象集合中,分别为各类对象集合在因素空间分布的中心,分别为各集合中的对象数量;使用欧几里得距离作为目标函数,以各类中心点与对象的距离为优化目标;优化函数如式(5)所示;
14、
15、这时qm=1,…,olm,设的坐标的坐标则
16、确定最优解,即目标函数的值为0,如式(6)所示;
17、
18、根据设定的距离条件终止迭代,得到所有因素的所有语义等级对对象集合的划分,qm类为对于单因素fm的qm语义等级的因素值域为进而得到对于qm类在所有因素下的因素值域空间,因素空间
19、本发明的有益技术效果为:本发明提供了一种多因素影响下语义等级的因素值域空间划分方法,能够更恰当地对语义等级的因素值域进行划分。
20、需要说明的是,本发明中未特别注明含义的字母,均为计算过程中的中间变量。
技术特征:
1.一种多因素影响下语义等级的因素值域空间划分方法,其特征在于,为满足多因素影响下根据预定目标的对象集合聚类要求,提出该方法;首先将对象映射到因素空间,其次确定最优语义等级数,再次对对象集合进行聚类分析,最后形成各语义等级的因素值域空间;实现对象集合的聚类分析需要构建目标-对象-因素-划分的数据结构;聚类数为最优语义等级数,使用calinski-harabasz指数确定,使用多维k-mean聚类方法实现;聚类数取决于最大calinski-harabasz指数和人的直觉,为大于3的奇数;用于多因素影响下,对象集合的聚类提供不同语义等级的因素值域空间划分方法;
2.根据权利要求1所述的多因素影响下语义等级的因素值域空间划分方法,其特征在于,
技术总结
本发明涉及对象聚类分析技术领域,提供了一种多因素影响下语义等级的因素值域空间划分方法,为满足多因素影响下根据预定目标的对象集合聚类要求,提出该方法。首先将对象映射到因素空间,其次确定最优语义等级数,再次对对象集合进行聚类分析,最后形成各语义等级的因素值域空间。实现对象集合的聚类分析需要构建目标‑对象‑因素‑划分的数据结构;聚类数为最优语义等级数,使用Calinski‑Harabasz(CH)指数确定,使用多维k‑mean聚类方法实现;聚类数取决于最大CH指数和人的直觉,为大于3的奇数。用于多因素影响下,对象集合的聚类提供不同语义等级的因素值域空间划分方法,能够更恰当地对语义等级的因素值域进行划分。
技术研发人员:李莎莎,崔铁军
受保护的技术使用者:沈阳理工大学
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!