一种尾流磁场试验装置及数据分析方法与流程
本发明涉及磁场测量的,具体而言,涉及一种尾流磁场试验装置及数据分析方法。
背景技术:
1、潜航器在水下航行时会引起周围海水运动,并在其后方形成大范围尾流。潜航器所致海水运动会衍生尾流磁场,这是因为具有导电性的海水在背景地磁场中作切割磁感线运动,将导致海水内部形成感应电流,从而产生尾流磁场。该磁场作用范围大、持续时间长,且与潜航器材料是否具有磁性以及是否进行了消磁处理并无关系。研制尾流磁场试验装置并研究相应的数据分析方法,对潜航器尾流磁场机理研究和探测新技术发展具有重要意义和潜在应用价值。
2、相较于潜航器本体磁场,潜航器航行导致的尾流磁场比较微弱,关于它的研究国内外刚起步,目前其试验装置及数据分析方法鲜有公开报道。试验装置实现的难点是如何测量微弱的尾流磁场,尽管磁传感技术得到了长足发展,目前国内外超低噪声磁传感器已能达到飞特级水平,例如以超导磁传感器、感应式磁传感器、金刚石色心磁传感器为代表的矢量磁传感器,和以光泵磁传感器、原子磁传感器为代表的标量磁传感器,但直接将上述先进磁传感器应用于尾流磁场试验装置,仍存在一些问题。主要原因有三点:一是由于潜航器在水下航行时,与之相关的海水运动速度较小,所以尾流磁场较弱;二是由于地磁场属于稳态磁场,加之海水运动速度的变化缓慢,所以地磁背景下的尾流磁场集中在极低频段,但磁传感器的低频噪声较大;三是试验装置周围的低频环境噪声也会对尾流磁场测量造成影响。
技术实现思路
1、本发明的目的在于:为解决潜航器所致尾流磁场的测量难题,提出一种尾流磁场新型试验装置及数据分析方法。
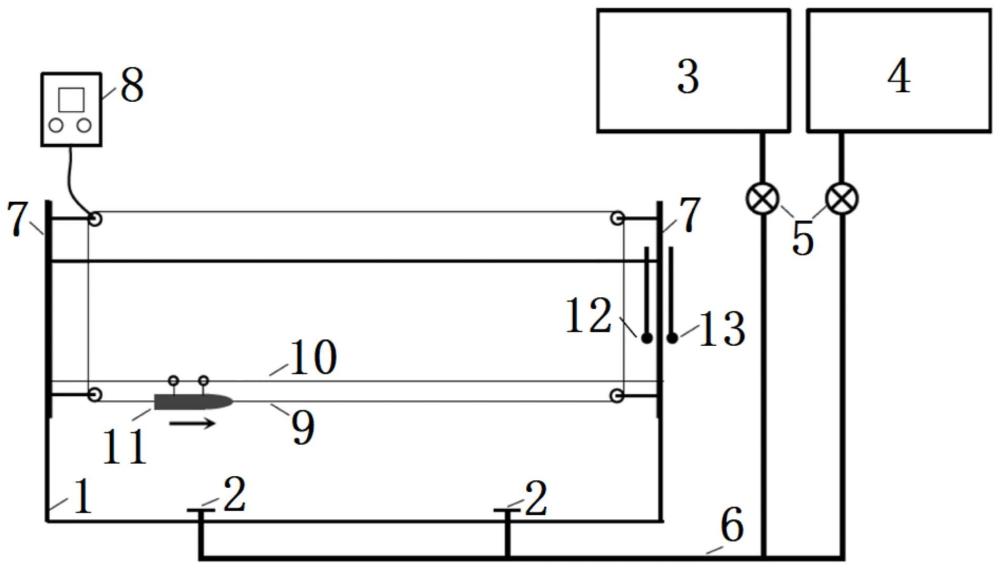
2、本发明的技术方案是:提供了一种尾流磁场试验装置及数据分析方法,该装置包括:分层流水槽、蘑菇型进水口、第一储水箱、第二储水箱、管道、拖曳支架、伺服电机、拖曳线、试验模型、流速传感器阵列、磁传感器阵列;
3、分层流水槽为顶部开口的缸体,分层流水槽的底部内侧设置两个蘑菇型进水口,蘑菇型进水口通过管道同时与第一储水箱和第二储水箱连通;
4、分层流水槽内壁设置两组对称的拖曳支架,其中每一组有两个拖曳支架,分别位于水平面的上下;拖曳支架的顶端为定滑轮,伺服电机与一个拖曳支架的定滑轮电连接,控制拖曳支架转动;拖曳线的两端连接在试验模型的两端形成闭环,该闭环套在四个拖曳支架的滑轮上,拖曳线拉直;
5、流速传感器阵列设置在分层流水槽的内壁上,磁传感器阵列设置在分层流水槽的外壁上,磁传感器阵列与流速传感器阵列的位置对应;
6、磁传感器阵列用于测量尾流磁场;流速传感器阵列向分层流体中发射声波,流速传感器阵列接收回波信号,流速传感器阵列分析多普勒效应的频移计算流速;流速传感器阵列与磁传感器阵列测量的数据传入计算机,绘制尾流磁场灰度图。
7、上述任一项技术方案中,进一步地,流速传感器阵列位于拖曳线和试验模型形成闭环所在的平面内,流速传感器阵列的一部分露出水面。
8、上述任一项技术方案中,进一步地,装置还包括:流量控制阀和水泵,流量控制阀和水泵设置在管道上。
9、上述任一项技术方案中,进一步地,第一储水箱和第二储水箱设置在比分层流水槽更高的位置,第一储水箱和第二储水箱内的水受重力作用通过管道和蘑菇型进水口从分层流水槽的底部流入;
10、流量控制阀控制管道内液体向分层流水槽流动的流速,试验完成后水泵启动,从分层流水槽的底部回收液体至第一储水箱和第二储水箱中。
11、上述任一项技术方案中,进一步地,装置还包括:引导线;
12、引导线设置在位于水平面以下的拖曳支架上方,引导线与水平面平行,引导线两端连接在分层流水槽的内壁上;试验模型通过挂环连接至引导线上,确保试验模型在跟随拖曳线运动的过程中不会左右摇晃,能够沿着直线运动。
13、上述任一项技术方案中,进一步地,分层流水槽内部盛放自来水-盐水的两层分层流体,两层分层流体的制备方法包括:
14、关闭流量控制阀,在第一储水箱和第二储水箱中填充特定浓度的盐水,在分层流水槽中倒入一定深度的自来水后,缓慢打开流量控制阀,盐水缓慢从分层流水槽的底部注入,当分层流水槽中液体达到规定的深度时关闭流量控制阀,分层流水槽中就形成了上层为自来水,下层为盐水的两层分层流体。
15、还提供了一种应用于上述任一项技术方案中的尾流磁场试验装置的数据分析方法,该方法包括:
16、通过不与流体接触的磁传感器阵列在流体外测量尾流磁场,与流体接触的流速传感器阵列向流体中发射声波,流体中的散射体会使声波发生散射,之后流速传感器阵列接收到散射体返还的回波信号,通过分析其多普勒效应的频移计算流速;流速传感器阵列与磁传感器阵列测量的数据传入计算机进行数据分析;
17、流速传感器阵列计算流速的具体方法为:
18、流速传感器阵列发送声波频率为f0,利用多普勒频移原理,通过测得尾流的流速得到尾流信号的频率值,多普勒频移原理表示为:
19、
20、其中多普勒频移δf通过流速传感器阵列得到,δf表示发送和接收声波频率的大小,c是声波在流体中的传播速度,通过上式可以得到尾流的流速v;
21、采用锁相放大算法从磁传感器测量数据中提取尾流磁场信号,将该方法应用于阵列式磁传感器的数据处理,可进行尾流磁场的空间分布成像。
22、上述任一项技术方案中,进一步地,锁相放大算法具体包括:
23、尾流运动可以通过质量和动量的平衡来表征,这种平衡用连续性方程以及纳维-斯托克斯方程进行描述,如下式:
24、
25、其中,ρ是海水密度,u是试验模型的运动速度,p是海水压力,μ是海水动力黏度,为哈密顿算子;纳维-斯托克斯方程的等式左边对应于惯性力,等式右边各项分别对应于压力、黏性力,以及作用在海水上的外力;
26、在地磁场作用下,尾流电场e和尾流磁场b满足麦克斯韦电磁理论:
27、
28、
29、上两式为麦克斯韦方程组的表达式,其中,j为尾流感应电流传导密度,j=σ(e+u×bs),μ0为海水磁导率,ε0为海水介电常数,bs表示地磁场;
30、通常认为海水的传导电流密度远大于位移电流密度,因此可以忽略尾流磁场满足:
31、
32、其中,σ为海水电导率;
33、由于尾流信号具有周期性变化特征,根据上式可知,利用尾流速度场频率值可以提取对应的尾流磁场信号幅值,设尾流磁场信号输入为:
34、x(t)=vscos(ω0t+θ);
35、设参考输入r(t)是幅度为±vr的方波,周期为t,角频率为ω0=2π/t。
36、参考输入r(t)的傅里叶级数表达式为:
37、
38、r(t)与x(t)相乘的结果up(t)为:
39、
40、其中,在上式中,为差频,为和频项,经过低通滤波后,n>1的差频项及所有的和频项均被滤除,只剩下n=1的差频项,当方波幅度vr=1时,可以实现方波信号与尾流磁场信号的相乘过程,低通滤波后的输出u0(t)为:
41、
42、将低通滤波的输出u0(t)输入至matlab软件的mat2gray函数中,生成尾流磁场的灰度图。
43、本发明的有益效果是:
44、本发明中的技术方案采用了密度分层流拖曳水槽结构,利用密度分层流水槽可很好地模拟海洋中的分层环境,使用试验模型以一定的速度在拖曳条件下进行运动,模拟潜航器在海洋中的运动方式,通过在水槽周边布置磁传感器进行测量,可以很好地研究潜航器在密度分层流体中运动时产生尾流磁场的机理及其表现特征;
45、本发明采用了阵列式传感器测量方法,将传感器阵列沿着水槽横向布置,测量并分析试验模型运动产生的尾流磁场,在融合后的尾流磁场时空结构灰度图中,试验模型尾流的波系分布和波形结构等具体物理信息清晰可见,解决了现有技术无法测量极其微弱的尾流磁场的问题;
46、本发明采用了基于锁相放大算法的数据分析方法,这是因为尾流信号具有周期性变化特征,而声学多普勒流速测量方式精度较高,因此利用它来获取尾流信号的频率值,再通过锁相放大算法从环境磁噪声中提取微弱的尾流磁场信号,能够使绘制的灰度图具有更高精度。
- 还没有人留言评论。精彩留言会获得点赞!