多特征融合的行人检测方法、装置、设备及介质与流程
本发明实施例涉及图像处理,特别涉及一种多特征融合的行人检测方法、装置、设备及介质。
背景技术:
1、在智能视频监控、智能交通、智能家居的缺陷检测等领域,经常检测和识别行人,通常可以采用一些特征来进行检测和识别,例如,著名的harr(哈尔)特征、hog(梯度直方图)特征、lbp(局部二进制模式)特征,以及基于cosine余弦变换的频谱特征等等。
2、尽管深度学习兴起以后,可以自动学习特征,但很多实验表明,辅助增加传统特征,还是可以提升深度学习方法的性能和鲁棒性。并且,对于一切计算资源较低、功耗要求较高的场合,采用传统特征依然有其应用场景。
3、传统的行人检测方法大多利用哈尔(harr)特征进行特征提取,然后将哈尔(harr)特征输入分类器实现行人检测。
4、然而,哈尔特征是采用矩形波对图像块进行调制,只采用两个区域像素和的差,因此,对于一些连续变化的区域,传统的行人检测方法缺乏较为高效的特征。
5、因此,亟需一种新的多特征融合的行人检测方法。
技术实现思路
1、为了解决现有的行人检测方法由于缺乏针对连续变化区域较为高效的特征而检测准确率较低的问题,本发明实施例提供了一种多特征融合的行人检测方法、装置、设备及介质。
2、第一方面,本发明实施例提供了一种多特征融合的行人检测方法,方法包括:
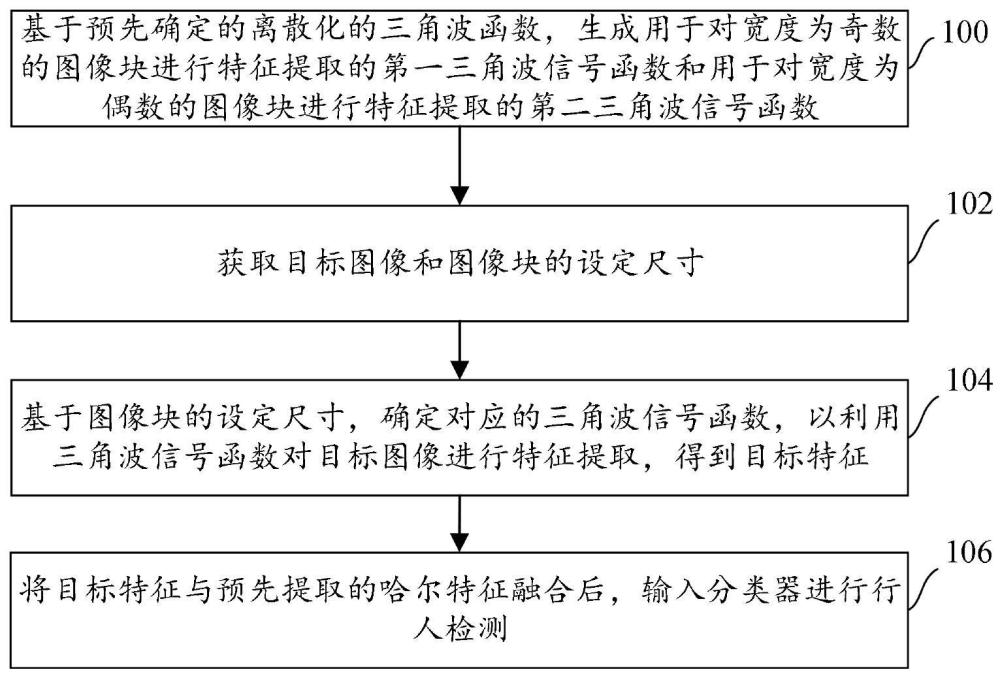
3、基于预先确定的离散化的三角波函数,生成用于对宽度为奇数的图像块进行特征提取的第一三角波信号函数和用于对宽度为偶数的图像块进行特征提取的第二三角波信号函数;
4、获取目标图像和图像块的设定尺寸;其中,所述图像块用于将所述目标图像划分成若干个小块;
5、基于所述图像块的设定尺寸,确定对应的三角波信号函数,以利用所述三角波信号函数对所述目标图像进行特征提取,得到目标特征;
6、将所述目标特征与预先提取的哈尔特征融合后,输入分类器进行行人检测。
7、第二方面,本发明实施例还提供了一种多特征融合的行人检测装置,装置包括:
8、生成单元,用于基于预先确定的离散化的三角波函数,生成用于对宽度为奇数的图像块进行特征提取的第一三角波信号函数和用于对宽度为偶数的图像块进行特征提取的第二三角波信号函数;
9、获取单元,用于获取目标图像和图像块的设定尺寸;其中,所述图像块用于将所述目标图像划分成若干个小块;
10、提取单元,用于基于所述图像块的设定尺寸,确定对应的三角波信号函数,以利用所述三角波信号函数对所述目标图像进行特征提取,得到目标特征;
11、检测单元,用于将所述目标特征与预先提取的哈尔特征融合后,输入分类器进行行人检测。
12、第三方面,本发明实施例还提供了一种计算设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器执行所述计算机程序时,实现本说明书任一实施例所述的方法。
13、第四方面,本发明实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序在计算机中执行时,令计算机执行本说明书任一实施例所述的方法。
14、本发明实施例提供了一种多特征融合的行人检测方法、装置、设备及介质,通过定义三角波信号函数,以利用三角波信号函数提取目标图像的目标特征,由于三角波波形连续,将目标特征与预先提取的哈尔特征融合后输入分类器,可以克服哈尔特征不连续的缺点,有效提升融合特征的特征值,提升行人检测的准确率。
技术特征:
1.一种多特征融合的行人检测方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,基于预先确定的离散化的三角波函数,生成用于对宽度为奇数的图像块进行特征提取的第一三角波信号函数,包括:
3.根据权利要求1所述的方法,其特征在于,用于对宽度为奇数的图像块进行特征提取的第一三角波信号函数是通过如下方式生成的:
4.根据权利要求1所述的方法,其特征在于,用于对宽度为偶数的图像块进行特征提取的第二三角波信号函数为:
5.根据权利要求1所述的方法,其特征在于,所述基于所述图像块的设定尺寸,确定对应的三角波信号函数,以利用所述三角波信号函数对所述目标图像进行特征提取,得到目标特征,包括:
6.根据权利要求1所述的方法,其特征在于,所述将所述目标特征与预先提取的哈尔特征融合后,输入分类器进行行人检测,包括:
7.一种多特征融合的行人检测装置,其特征在于,包括:
8.一种计算设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器执行所述计算机程序时,实现如权利要求1-6中任一项所述的方法。
9.一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序在计算机中执行时,令计算机执行权利要求1-6中任一项所述的方法。
技术总结
本发明涉及图像处理技术领域,特别涉及一种多特征融合的行人检测方法、装置、设备及介质。方法包括:基于预先确定的离散化的三角波函数,生成用于对宽度为奇数的图像块进行特征提取的第一三角波信号函数和用于对宽度为偶数的图像块进行特征提取的第二三角波信号函数;获取目标图像和图像块的设定尺寸;其中,图像块用于将目标图像划分成若干个小块;基于图像块的设定尺寸,确定对应的三角波信号函数,以利用三角波信号函数对目标图像进行特征提取,得到目标特征;将目标特征与预先提取的哈尔特征融合后,输入分类器进行行人检测。本方案可以克服哈尔特征不连续的缺点,有效提升融合特征的特征值,提升行人检测的准确率。
技术研发人员:陈静玉,郭春雷,李睿智,郭志,李佳
受保护的技术使用者:北京环境特性研究所
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!