基于AR的远程协作巡检方法和装置与流程
本公开涉及设备巡检,尤其涉及一种基于ar的远程协作巡检方法和装置。
背景技术:
1、现有的工厂巡检过程,都是基于标志信息或定位信息进行巡检,巡检人员需要根据巡检手册进行查询记录,步骤较为繁且不便,具体存在以下技术问题:
2、巡检手册记忆难:巡检手册内容繁多,巡检人员无法在培训内将手册内容完全掌握。此外,人员不断流动,新老员工的交替让企业需要不断对员工进行培训,因此不断付出高昂的培训成本。
3、巡检操作规范难、巡检疏漏避免难:人不像计算机,粗心和懒惰是人性的弱点和通病。在巡检过程中很难保证完全遵循操作规范,没有疏漏,因此会造成隐患。隐患一旦变成事故,企业将支付高昂的成本。
4、巡检情况记录难:巡检作业通常需要在巡检过程中进行纸质记录或者利用pda、平板电脑等辅助设备进行记录。人工记录不仅繁琐,而且会束缚巡检人员的双手,降低了他们的工作效率。
5、数据孤立,缺乏关联:巡检过程中产生大量数据,但是巡检数据孤立,没有智能化关联分析,不能有效预防管理安全隐患。
6、如何提高工厂设备巡检质量,及时发现和记录设备缺陷和隐患,避免巡检不到位或不及时等现象,在工厂设备的巡检工作中有很强的需求,也是当下亟待解决的问题。
技术实现思路
1、有鉴于此,本公开提供了一种基于ar的远程协作巡检方法和装置。
2、根据本公开的第一方面,提供了基于ar的远程协作巡检方法。该方法包括:
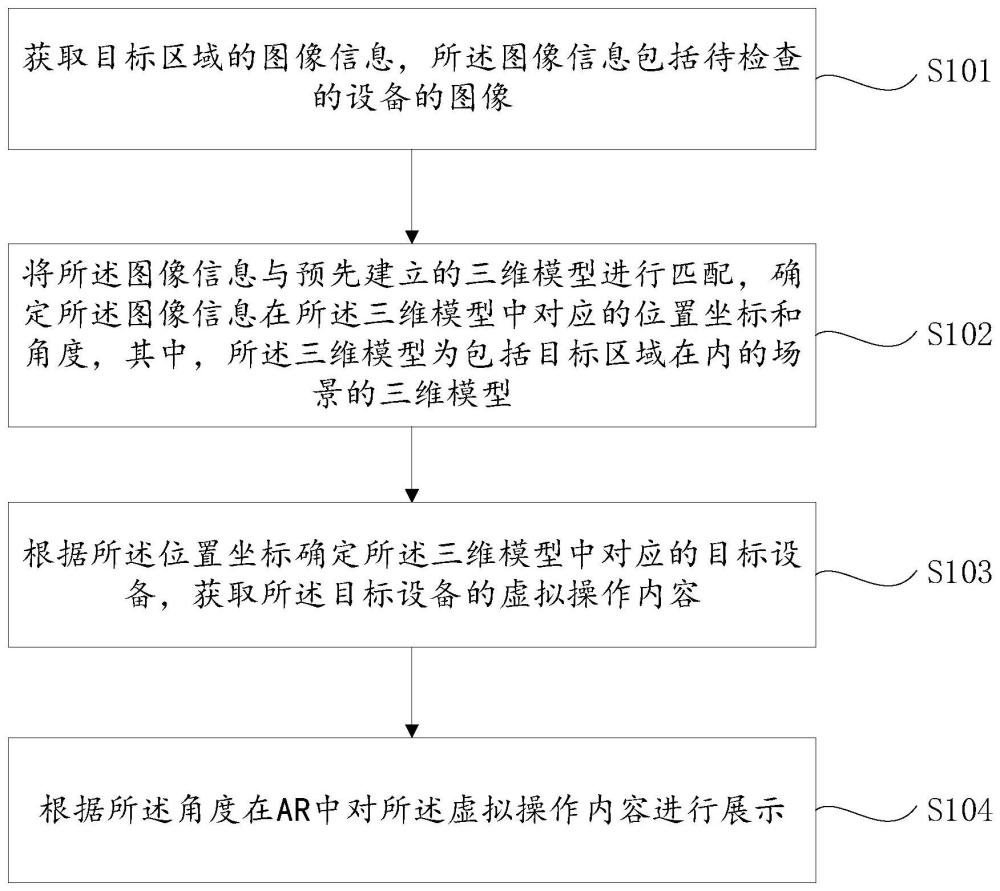
3、获取目标区域的图像信息,所述图像信息包括待检查的设备的图像;
4、将所述图像信息与预先建立的三维模型进行匹配,确定所述图像信息在所述三维模型中对应的位置坐标和角度,其中,所述三维模型为包括目标区域在内的场景的三维模型;
5、根据所述位置坐标确定所述三维模型中对应的目标设备,获取所述目标设备的虚拟操作内容;
6、根据所述角度在ar中对所述虚拟操作内容进行展示。
7、在一些实施例中,还包括预先构建所述三维模型的过程,具体包括:
8、获取目标场景的各个区域的二维平面图像,根据所述二维平面图像拼接出所述目标场景的整体平面图像;
9、对各个区域内的静置物和待检查的设备进行三维建模,并将建立的三维模型对应到整体平面图像中,生成场景的三维模型。
10、在一些实施例中,还包括:
11、根据检查步骤生成针对待检查的设备的三维动画,将所述三维动画与待检查的设备的初始图像进行关联。
12、在一些实施例中,所述初始图像为从不同角度采集到的待检查的设备在目标场景中的初始状态图像。
13、在一些实施例中,所述将所述三维动画与待检查的设备的初始图像进行关联,包括:
14、生成待检查的设备的唯一标识信息,将所述三维动画和所述初始状态图像分别与所述唯一标识信息进行关联,进而将所述三维动画与待检查的设备的初始图像进行关联,其中,每个初始状态图像对应有角度信息。
15、在一些实施例中,所述唯一标识信息还关联有位置坐标;
16、所述将所述图像信息与预先建立的三维模型进行匹配,确定所述图像信息在所述三维模型中对应的位置坐标和角度,包括:
17、将所述图像信息与所述初始状态图像进行匹配,将匹配成功的初始状态图像对应的角度信息作为所述图像信息在所述三维模型中对应角度,将与匹配成功的初始状态图像关联的唯一标识信息对应的位置坐标作为所述图像信息在所述三维模型中对应的位置坐标。
18、在一些实施例中,所述根据所述位置坐标确定所述三维模型中对应的目标设备,获取所述目标设备的虚拟操作内容,包括:
19、根据所述位置坐标确定对应的唯一标识信息,根据确定的唯一标识信息获取对应的三维动画。
20、根据本公开的第二方面,提供了基于ar的远程协作巡检装置。该装置包括:
21、图像信息获取模块,用于获取目标区域的图像信息,所述图像信息包括待检查的设备的图像;
22、图像匹配模块,用于将所述图像信息与预先建立的三维模型进行匹配,确定所述图像信息在所述三维模型中对应的位置坐标和角度,其中,所述三维模型为包括目标区域在内的场景的三维模型;
23、目标设备确定模块,用于根据所述位置坐标确定所述三维模型中对应的目标设备,获取所述目标设备的虚拟操作内容;
24、虚拟操作内容展示模块,用于根据所述角度在ar中对所述虚拟操作内容进行展示。
25、根据本公开的第三方面,提供了一种电子设备。该电子设备包括:存储器和处理器,所述存储器上存储有计算机程序,所述处理器执行所述程序时实现如第一方面所述的方法。
26、根据本公开的第四方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现如第一方面所述的方法。
27、本公开实施例的基于ar的远程协作巡检方法,能够降低巡检难度,提高巡检效率,提高巡检操作规范,降低安全隐患。
28、应当理解,
技术实现要素:
部分中所描述的内容并非旨在限定本公开实施例的关键或重要特征,亦非用于限制本公开的范围。本公开的其它特征将通过以下的描述变得容易理解。
技术特征:
1.基于ar的远程协作巡检方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,还包括预先构建所述三维模型的过程,具体包括:
3.根据权利要求2所述的方法,其特征在于,还包括:
4.根据权利要求3所述的方法,其特征在于,所述初始图像为从不同角度采集到的待检查的设备在目标场景中的初始状态图像。
5.根据权利要求4所述的方法,其特征在于,所述将所述三维动画与待检查的设备的初始图像进行关联,包括:
6.根据权利要求5所述的方法,其特征在于,所述唯一标识信息还关联有位置坐标;
7.根据权利要求6所述的方法,其特征在于,所述根据所述位置坐标确定所述三维模型中对应的目标设备,获取所述目标设备的虚拟操作内容,包括:
8.基于ar的远程协作巡检装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:
10.一种存储有计算机指令的非瞬时计算机可读存储介质,其特征在于,所述计算机指令用于使所述计算机执行根据权利要求1-7中任一权利要求所述的方法。
技术总结
本公开实施例提供了基于AR的远程协作巡检方法和装置,应用于设备巡检技术领域。所述方法包括:获取目标区域的图像信息,所述图像信息包括待检查的设备的图像;将所述图像信息与预先建立的三维模型进行匹配,确定所述图像信息在所述三维模型中对应的位置坐标和角度,其中,所述三维模型为包括目标区域在内的场景的三维模型;根据所述位置坐标确定所述三维模型中对应的目标设备,获取所述目标设备的虚拟操作内容;根据所述角度在AR中对所述虚拟操作内容进行展示。以此方式,能够降低巡检难度,提高巡检效率,提高巡检操作规范,降低安全隐患。
技术研发人员:钱晓钧,郭顺雷
受保护的技术使用者:北京国联视讯信息技术股份有限公司
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!