一种估算飞行器空速、攻角和侧滑角的方法及系统与流程
本技术涉及飞行器,具体涉及一种估算飞行器空速、攻角和侧滑角的方法及系统。
背景技术:
1、现代飞行器对大气数据的可用性和完整性提出了更高的要求。大气数据描述了飞行器周围气团的状态。飞行器的大气数据一般包括:总压、静压、攻角、侧滑角、大气总温和其他合适的大气数据。在飞行过程中,飞行员和机载系统利用大气数据来测量飞行器的性能,并为飞行控制和导航提供输入。传统大气数据系统(ads)主要使用安装在飞行器外部或蒙皮上的大气数据探头(传感器),例如皮托管、机身静压孔、风标式攻角传感器和大气总温传感器。这些传统传感器可能会受到环境和其他条件的不利影响。例如,如果皮托管被冰或其他异物堵塞,则可能造成总压测量错误,从而导致错误的空速计算。近年来,随着电传飞行器的普及,对获取可信的大气数据提出了更高的要求,因为大气数据用于全时控制增强,如电传飞行器的闭环侧滑控制和包线保护。通常的做法是使用大气数据传感器和计算机的物理冗余,通过交叉比较和投票的方法发现大气数据中的错误。然而,传统大气数据系统的物理冗余并没有提供独立的测量原理,并且仍然存在无法解决的错误情形,例如当飞行器遇到因区域性结冰而导致多个皮托管失效时。在这种情况下,不能通过交叉比较或投票得到正确的总压。
2、融合大气数据系统(sads)是一种确定大气数据测量的替代方法,它不要求大气数据传感器正常工作,其基本思想是通过融合非大气数据传感器与飞行器动力学模型来估算大气数据。有两类sads方法。一种是基于气动模型的sads,它混合了来自飞行器运动方程和其他传感器的信息来估算大气数据。基于模型的sads通常用惯性测量单元(imu)和全球导航卫星系统(gnss)数据与飞行器动力学预测相融合的方式,以得到估算的空速、攻角和侧滑角。当采用递归线性滤波方法(如卡尔曼滤波器形式)实现时,基于模型的sads可以将空速作为状态量之一,根据飞行器动力学模型建立状态方程,根据非大气数据传感器测量信息及其与状态量的关系建立测量方程,然后采用递归线性滤波方案估算空速,如卡尔曼滤波器(kf)、扩展卡尔曼滤波器(ekf)和无迹卡尔曼滤波器(ukf)。基于气动模型的sads的实施具有挑战性,因为需要获取全面的飞行器动力学参数、控制面参数以及飞行器其他特征,来建立具有所需保真度的飞行器动力学模型,从而保证大气数据的估算精度。另一种是无模型的sads,它不需要飞行器动力学模型来提供对更新的飞行器状态的预测。一种无模型的方法使用升力模型,利用升力系数、攻角和空速(或动压)之间的关系来计算大气数据。例如,利用动压计算攻角,或利用攻角计算动压,或利用攻角和高度计算空速,但这种方法仍然使用了大气数据系统(ads)提供的参数,因此并不与ads完全独立。
技术实现思路
1、针对现有技术中的上述不足,本发明提供的一种估算飞行器空速、攻角和侧滑角的方法及系统解决了以下问题:
2、1.现有估算飞行器空速、攻角和侧滑角的方法在尺寸、重量、功率受限的飞行器上无法通过安装冗余的大气数据计算机和/或传感器来提高安全性和可靠性;
3、2.现有估算飞行器空速、攻角和侧滑角的方法在测量原理层面不独立于传统大气数据系统的问题。
4、为了达到上述发明目的,本发明采用的技术方案为:提供一种估算飞行器空速、攻角和侧滑角的方法,包括以下步骤:
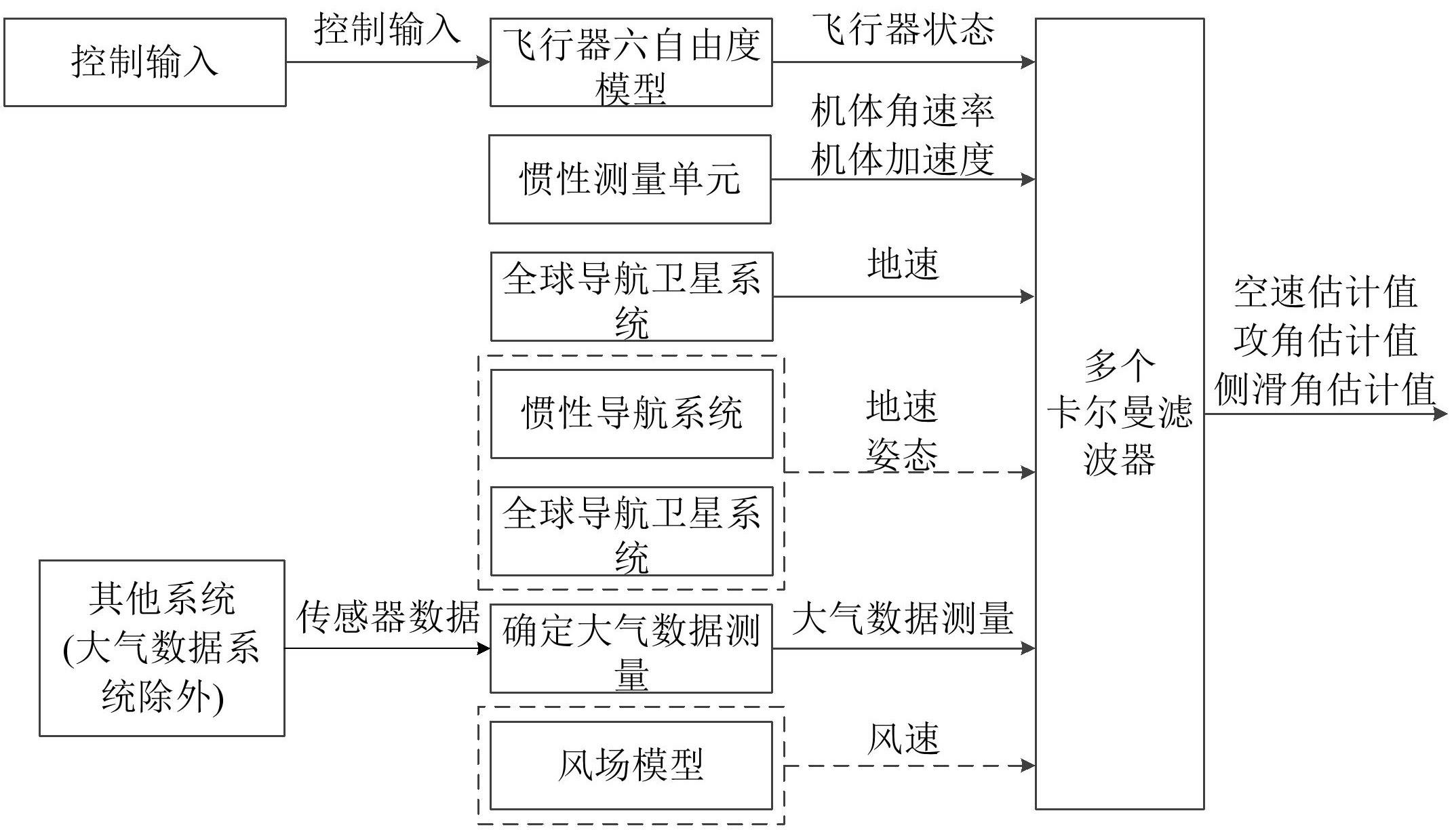
5、以非线性状态空间形式对飞行器的全六自由度动力学、气动学、力和力矩进行建模;
6、利用惯性测量单元测量飞行器的机体角速率和机体加速度;
7、利用全球导航卫星系统测量地速;
8、利用除大气数据系统外的飞行器其他系统的数据确定大气数据测量;
9、利用多个卡尔曼滤波器从所有测量的数据中估算空速、攻角和/或侧滑角。
10、进一步地:所述建模的飞行器六自由度模型的输入为控制输入信息。
11、进一步地:所述飞行器六自由度模型使用线性或非线性飞行器六自由度模型。
12、进一步地:所述多个卡尔曼滤波器还可以使用经全球导航卫星系统和/或惯性导航系统融合而产生的地速和姿态
13、进一步地:所述多个卡尔曼滤波器还可以使用从发动机传感器数据确定的总温测量值。
14、进一步地:所述多个卡尔曼滤波器还可以使用从全球导航卫星系统和/或惯性导航系统和/或发动机传感器数据确定的压力测量进行融合。
15、进一步地:所述多个卡尔曼滤波器还可以使用风场模型来获取风速估算值。
16、进一步地:所述多个卡尔曼滤波器使用卡尔曼滤波器、扩展卡尔曼滤波器、基于误差状态的卡尔曼滤波器和/或无迹卡尔曼滤波器。
17、进一步地:使用加权滤波器或算法来融合多个卡尔曼滤波器的输出。
18、进一步地:本方法所述的空速包括马赫数、校准空速和/或真空速。
19、本发明还提供了一种基于估算飞行器空速、攻角和侧滑角的方法的估算飞行器空速、攻角和侧滑角的系统,其包括控制输入、飞行器动力学模型、全球导航卫星系统、惯性导航系统、风场模型、发动机传感器、大气数据融合模块和卡尔曼滤波模块;
20、所述控制输入传输至飞行器动力学模型,包括飞行器控制表面偏转、油门杆位置或推力;
21、所述飞行器动力学模型用于预测飞行器状态;
22、所述全球导航卫星系统和/或惯性导航系统用于识别飞行器高度,并通过高度产生静压;
23、所述全球导航卫星系统和/或惯性导航系统用于识别地速测量和姿态测量,并将其传输至卡尔曼滤波模块;
24、所述风场模型用于估算风速,并将其传输至卡尔曼滤波模块;
25、所述发动机传感器用于识别静压、总压和/或总温测量;
26、所述大气数据融合模块用于融合静压、总压和/或总温;
27、所述卡尔曼滤波模块用于估算空速、攻角和/或侧滑角。
28、进一步地:所述飞行器动力学模型使用线性或非线性飞行器动力学模型。
29、进一步地:所述估算飞行器空速、攻角和侧滑角的系统所述估算飞行器空速、攻角和侧滑角的系统从除大气数据系统外的其他系统识别高度,并通过高度产生静压。
30、进一步地:所述估算飞行器空速、攻角和侧滑角的系统还可以包括惯性测量单元,所述惯性测量单元用于测量机体角速率和机体加速度。
31、进一步地:所述估算飞行器空速、攻角和侧滑角的系统使用除大气数据系统外的其他系统识别的与静压、总压和总温三者任意之一相关的数据。
32、进一步地:所述卡尔曼滤波模块使用卡尔曼滤波器、扩展卡尔曼滤波器、基于误差状态的卡尔曼滤波器和/或无迹卡尔曼滤波器。
33、进一步地:所述卡尔曼滤波模块的输出使用加权滤波器或算法进行融合。
34、进一步地:本系统所述的空速包括马赫数、校准空速和/或真空速。
35、本发明的有益效果为:
36、1.本发明提供的方法和系统基于飞行器其他系统提供的数据来估算飞行器的空速、攻角和侧滑角,完全独立于传统大气数据系统(ads),可在传统大气数据系统失效时作为备份使用,有助于提高飞行器的安全性;
37、2.本发明提供的方法和系统利用飞行器现有系统的传感器测量数据,无需在飞行器上安装额外的传感器,除非专门要求额外的硬件环境,涉及的算法可与飞行器现有系统共享硬件,大大节约了成本。
- 还没有人留言评论。精彩留言会获得点赞!