一种新能源汽车的adas综合评测系统的制作方法
本发明涉及adas器件评测,具体涉及一种新能源汽车的adas综合评测系统。
背景技术:
1、adas即高级驾驶辅助系统(advanced driving assistance system),是利用安装在车上的各式各样传感器(雷达、摄像头以及卫星导航),在汽车行驶过程中随时来感应周围的环境,收集数据,进行静态、动态物体的辨识、侦测与追踪,并结合导航地图数据,进行系统的运算与分析,从而预先让驾驶者察觉到可能发生的危险,有效增加汽车驾驶的舒适性和安全性。
2、近年来随着新能源汽车的蓬勃发展,新能源汽车相对于燃油汽车而来,安装性配置以及辅助驾驶配置更好,进而带来adas市场增长迅速,原来这类系统局限于高端市场,而现在正在进入中低端市场,与此同时,许多低技术应用在入门级乘用车领域更加常见,经过改进的新型传感器技术也在为系统布署创造新的机会与策略。
3、在新能源汽车出厂时,需要对adas器件(雷达、摄像头)的安装姿态进行检测,现有检测主要通过人工检测的方式进行检测,存在检测准确率低、检测效率低、人工成本高等问题;上述问题亟待解决。为此,提出一种新能源汽车的adas综合评测系统。
技术实现思路
1、本发明所要解决的技术问题在于:如何解决现有技术中对adas器件的安装姿态进行检测时,人工检测的方式存在的检测准确率低、检测效率低、人工成本高等问题,提供了一种新能源汽车的adas综合评测系统。
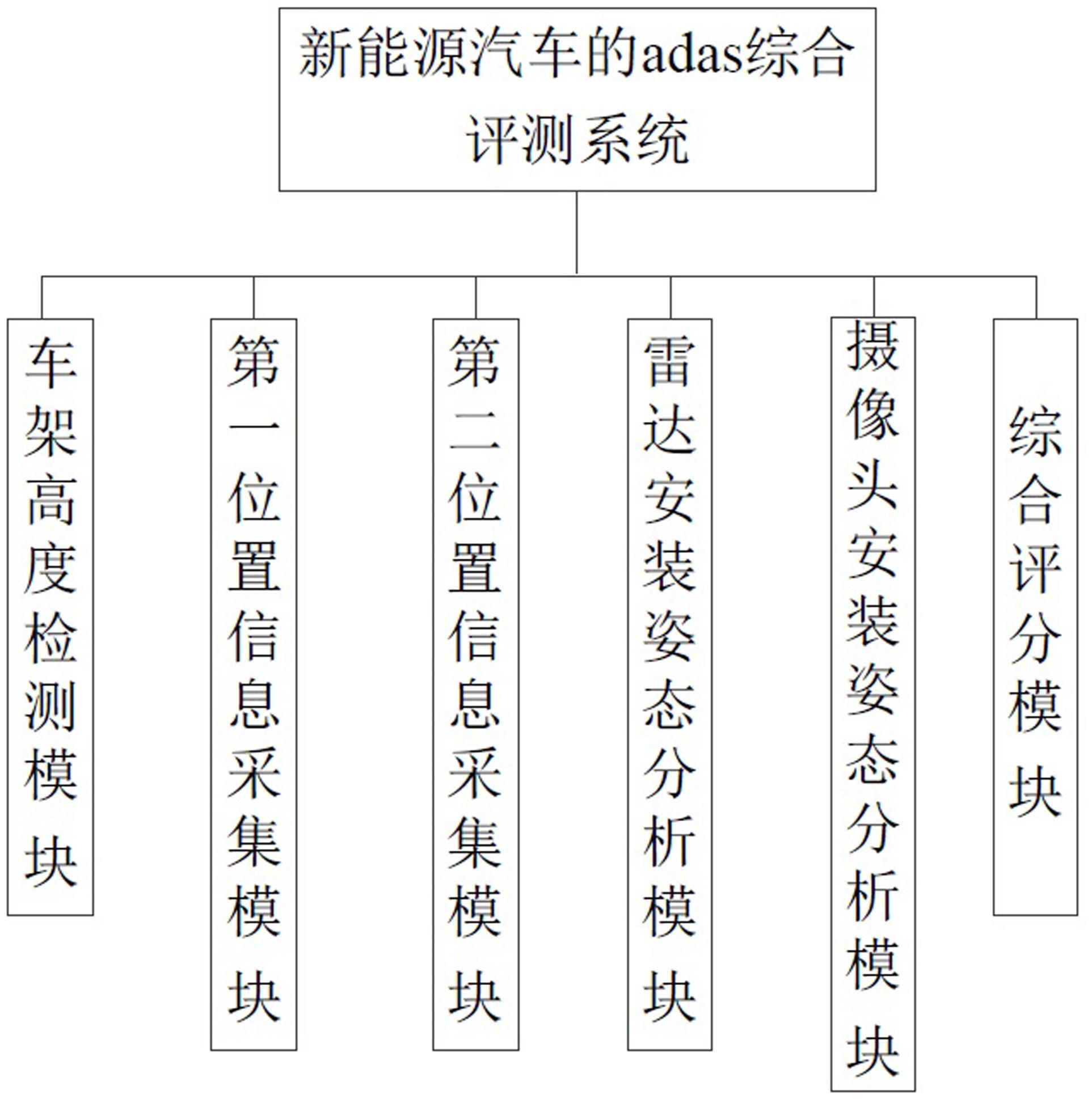
2、本发明是通过以下技术方案解决上述技术问题的,本发明包括车架高度检测模块、第一位置信息采集模块、第二位置信息采集模块、雷达安装姿态分析模块、摄像头安装姿态分析模块、综合评分模块;
3、所述车架高度检测模块,用于采集车辆车架多个检测位置的高度信息,判断车辆车架各个检测位置的高度信息是否在对应的高度设定阈值范围内,当各个检测位置的高度信息均在对应的高度设定阈值范围内时,则启动第一位置信息采集模块、第二位置信息采集模块采集相应的位置信息;
4、所述第一位置信息采集模块,用于采集各第一检测试件在对应位置的待检测雷达中的位置信息;
5、所述第二位置信息采集模块,用于采集各第二检测试件在对应位置的待检测摄像头中的位置信息;
6、所述雷达安装姿态分析模块,用于根据各第一检测试件在对应位置的待检测雷达中的位置信息,获取各待检测雷达的安装姿态信息;
7、所述摄像头安装姿态分析模块,用于根据第二检测试件在待检测摄像头中的位置信息,获取各待检测摄像头的安装姿态信息;
8、所述综合评分模块,用于根据各待检测雷达的安装姿态信息获取雷达安装姿态评分p,并用于根据各待检测摄像头的安装姿态信息获取摄像头安装姿态评分t,最后根据雷达安装姿态评分p与摄像头安装姿态评分t计算获取安装姿态综合评分c。
9、更进一步地,所述车架高度检测模块包括两个沿车辆长度方向间隔设置的第一测距单元、两个沿车辆宽度方向间隔设置的第二测距单元、分析判断单元;所述第一测距单元、第二测距单元沿竖直方向测量其与车辆车架上对应检测位置之间的距离,记为高度gm,其中,下标中的m表示第m个测距单元,然后将各个检测位置的高度gm发送至所述分析判断单元中;所述分析判断单元用于判断各个检测位置的高度gm是否均在高度设定阈值g设定范围内。
10、更进一步地,所述第一位置信息采集模块包括第一试件驱动单元、第一位置信息获取单元;所述第一试件驱动单元包括第一竖直直线模组、第一检测试件;所述第一检测试件安装在所述第一竖直直线模组下端,在第一竖直直线模组的控制下实现竖直上升及下降;所述第一位置信息获取单元与各个待检测雷达通信连接,进而获取在各个待检测雷达中各个第一检测试件的第一坐标,记为(xn,yn,zn),其中,下标中的n表示第n个待检测雷达。
11、更进一步地,所述第二位置信息采集模块包括第二试件驱动单元、第二位置信息获取单元;所述第二试件驱动单元包括第二竖直直线模组、第二检测试件;所述第二检测试件安装在所述第二竖直直线模组上端,在第二竖直直线模组的控制下实现竖直上升及下降;所述第二位置信息获取单元与各个待检测摄像头通信连接,进而获取在各个待检测摄像头中各个第二检测试件的第二坐标,记为(xk,yk),其中,下标中的k表示第k个待检测摄像头。
12、更进一步地,所述雷达安装姿态分析模块的处理过程如下:
13、步骤s11:当车辆车架各个检测位置的高度信息在对应的高度设定阈值范围内时,各待检测雷达的坐标为预设值,具体为(x0n,y0n,z0n);
14、步骤s12:获取各第一检测试件在各待检测雷达中的位置信息,即坐标(xn,yn,zn);
15、步骤s13:根据各第一检测试件在各待检测雷达中的位置信息(xn,yn,zn)、各待检测雷达的预设坐标(x0n,y0n,z0n)、各待检测雷达与对应的第一检测试件之间的距离rn,计算得到各待检测雷达的方位角an和俯仰角bn,即各待检测雷达的安装姿态信息。
16、更进一步地,在所述步骤s13中,各待检测雷达的方位角an的计算公式如下:
17、an=arctan((yn-y0n)/(xn-x0n));
18、各待检测雷达的俯仰角bn的计算公式如下:
19、bn=arctan((zn-z0n)/rn);
20、其中,rn为预先测量得到的各待检测雷达与对应的第一检测试件之间的距离。
21、更进一步地,所述摄像头安装姿态分析模块的处理过程如下:
22、步骤s21:通过各待检测摄像头获取包含有第二检测试件的多张第二检测试件图像,每个待检测摄像头获取一张第二检测试件图像;
23、步骤s22:利用经过训练的试件识别模型对各第二检测试件图像的第二检测试件检测框及其左上角点与右下角点在图像坐标系中的坐标,根据左上角点与右下角点坐标计算各第二检测试件检测框中心点的坐标(xk,yk),获取预先计算得到的在各待检测摄像头的安装姿态准确时第二检测试件检测框中心点的坐标(x0k,y0k);
24、步骤s23:根据坐标(xk,yk)与坐标(x0k,y0k)计算各待检测摄像头的水平位置偏差sk和竖直位置偏差vk;
25、步骤s24:各待检测摄像头的水平位置偏差sk、竖直位置偏差vk、各待检测摄像头与对应的第二检测试件之间的距离jk,计算得到各待检测摄像头的水平偏角hk和竖直偏角lk,即各待检测摄像头的安装姿态信息。
26、更进一步地,在所述步骤s23中,各待检测摄像头的水平位置偏差sk的计算公式如下:
27、sk=xk-x0k;
28、各待检测摄像头的竖直位置偏差vk的计算公式如下:
29、vk=yk-y0k。
30、更进一步地,在所述步骤s24中,各待检测摄像头的水平偏角hk的计算公式如下:
31、hk=arctan((xk-x0k)/jk);
32、各待检测摄像头的竖直偏角lk的计算公式如下:
33、lk=arctan((yk-y0k)/jk);
34、其中,jk为预先测量得到的各待检测摄像头与对应的第二检测试件之间的距离。
35、更进一步地,所述综合评分模块的处理过程如下:
36、步骤s31:获取各待检测雷达的方位角an和俯仰角bn,将各待检测雷达的方位角an与方位角设定阈值a设定进行比较,记录方位角不在方位角设定阈值a设定范围内的待检测雷达数量,记为e1;将各待检测雷达的俯仰角bn与俯仰角设定阈值b设定进行比较,记录俯仰角不在俯仰角设定阈值b设定范围内的待检测雷达数量,记为e2,进而计算得到雷达安装姿态评分p:
37、p=e1+e2;
38、步骤s32:获取各待检测摄像头的水平偏角hk和竖直偏角lk,将各待检测摄像头的水平偏角hk与水平偏角设定阈值h设定进行比较,记录水平偏角不在水平偏角设定阈值h设定范围内的待检测摄像头数量,记为f1;各待检测摄像头的竖直偏角lk与竖直偏角设定阈值l设定进行比较,记录竖直偏角不在竖直偏角设定阈值l设定范围内的待检测摄像头,记为f2,进而计算得到摄像头安装姿态评分t:
39、t=f1+f2;
40、步骤s33:根据雷达安装姿态评分p与摄像头安装姿态评分t计算获取安装姿态综合评分c:
41、c=w1*p+w2*t;
42、其中,w1为雷达安装姿态评分p在安装姿态综合评分c中所占的权重,w2为摄像头安装姿态评分t在安装姿态综合评分c中所占的权重。
43、本发明相比现有技术具有以下优点:该新能源汽车的adas综合评测系统,通过设置的车架高度检测模块,能够采集车辆车架多个检测位置的高度信息,使车辆车架出现倾斜时能够及时地校正,有效保证后续安装姿态分析工作的准确性,避免由车辆车架出现倾斜而造成的分析误差;通过设置的第一位置信息采集模块、第二位置信息采集模块,能够通过检测试件在对应位置的待检测雷达/摄像头中的位置信息,利用雷达安装姿态分析模块、摄像头安装姿态分析模块准确地获取各待检测雷达/摄像头的安装姿态信息;最后利用综合评分模块计算获取安装姿态综合评分,实现了对雷达/摄像头安装姿态的综合评价,对后续的安装质量提升工作具有良好的指导意义。
- 还没有人留言评论。精彩留言会获得点赞!