基于红外光与最优自适应模板匹配的拉索索力测试方法与流程
本发明属于桥梁健康监测,具体涉及一种基于红外光与最优自适应模板匹配的拉索索力测试方法。
背景技术:
1、近几十年来,随着社会经济的飞速发展和城市化进程的推进,交通运输事业蓬勃发展,越来越多的桥梁得以修建,以满足人们日益增长的货物运输和出行的需求。其中,斜拉桥、悬索桥、拱桥等缆索承重桥梁凭借其造型美观、性价比高、跨越能力强等优点,在大跨径桥梁中被广泛使用。拉索作为缆索承重桥梁的主要承重构件,通常采用高强度钢丝和钢绞线制作而成,如斜拉桥中的斜拉索、悬索桥中的吊杆和主缆、拱桥中的吊杆和系杆等。缆索承重桥梁一般是内部高次超静定结构,桥梁的内力分布很大程度上取决于拉索索力分布情况。拉索在使用过程中易产生应力松弛、预应力损失、腐蚀等病害,从而引起结构内力重分布,由拉索损伤导致的桥梁垮塌事故时有发生。因此,拉索的索力监测对缆索承重桥梁的安全具有重要意义,有必要在桥梁的施工和运营阶段进行索力监测。
2、目前常用的索力测试方法包括油压表测量法、压力传感器测量法、频率法、磁通量法、机器视觉法等。其中基于机器视觉的方法具有可视化、成本低、安装方便、适用范围广等优点,得到了广泛应用。如专利cn114972295a-基于多点位移提取的非接触式索力识别技术、专利cn108955983a-基于拉索振型及摄影测量技术的索力测试方法、专利cn112381190a-一种基于手机图像识别的索力测试方法、专利cn113607321a-索结构的索力测试方法、装置、计算机设备和存储介质、专利cn111259770a-一种基于无人机平台和深度学习的复杂背景下索力快速测试系统及方法等,均采用了机器视觉的方法进行索力测试,虽能在一定条件下进行索力测试,但是在恶劣天气条件(如雨、雾、雪等)索力测试难度大、准确性差。此外,基于机器视觉的索力测试方法是利用视觉设备进行视频采集,难以在光照强度弱(如夜晚、黑暗环境等)的环境下进行有效的索力测试。
3、因此,有必要提出一种合适的索力测试方法,解决在恶劣天气条件(如雨、雾、雪等)索力测试难度大、准确性差的问题,并能够在光照强度弱(如夜晚、无光源等)的环境下进行准确的索力测试,提高测量效率和测量精度。
4、现有基于机器视觉的方法均为非接触式索力测试方法,一般流程为在拉索上安装靶标,利用视觉设备进行拉索振动视频采集,捕捉靶标的位移时程曲线,对位移时程数据进行频谱分析,最后根据频率-索力公式计算索力。现有技术的缺点在于对拉索上的靶标进行图像采集时受外部环境干扰较大,如恶劣的天气条件(如雨、雾、雪等),一定程度上会遮挡靶标,从而难以连续地采集到清晰的靶标振动视频,给索力测试带来较大的难度。此外,在利用视觉设备进行拉索振动视频采集时,都是在光照强度充分的情况下进行视频采集,但是当在光照强度弱(如夜晚、无光源等)的情况下,拉索及靶标的可见度较低,导致不能采集到清晰可见的拉索振动视频,也就难以进行索力测试。同时,现有机器视觉算法对低照度、高频快速运动场景下的识别效果有限。
技术实现思路
1、为了克服现有索力测试技术中存在的不足,本发明提供一种基于红外光与最优自适应模板匹配的拉索索力测试方法,能够实现在恶劣天气和光照强度弱的条件下进行非接触式的拉索索力测试,在保证测量准确性的前提下,提高测量效率和精度,其技术方案如下:
2、一种基于红外光与最优自适应模板匹配的拉索索力测试方法,其特征为,包括如下步骤:
3、步骤1:采集拉索振动视频:将红外灯靶标安装在拉索上的测点位置,随后利用安装有红外滤镜的相机,对拉索的振动视频进行采集;
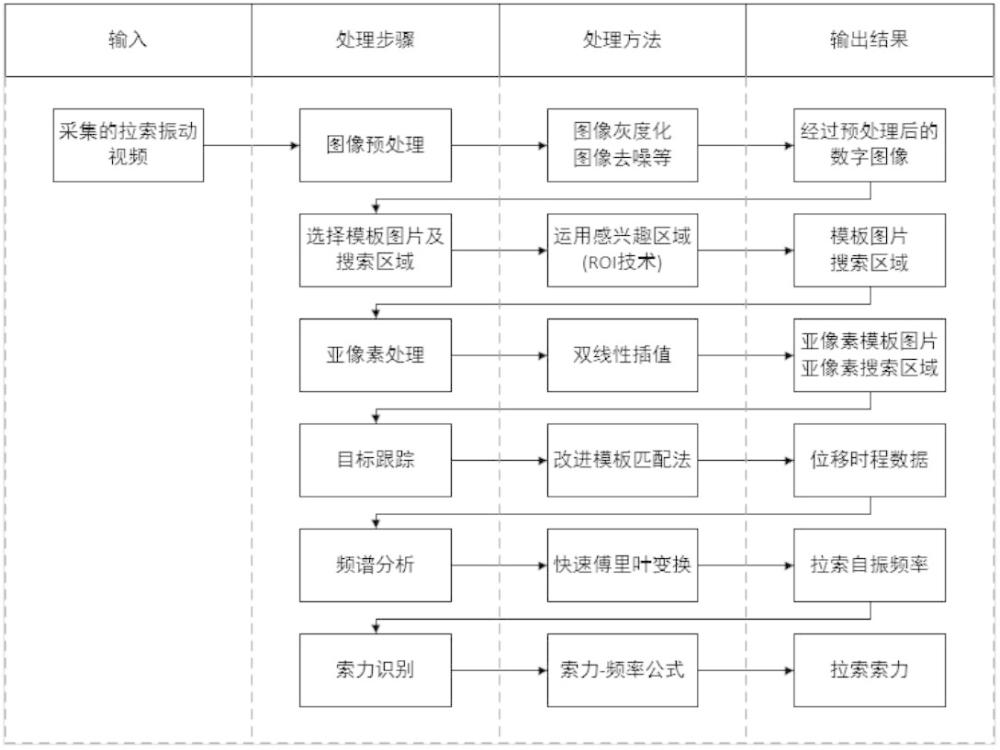
4、步骤2:图像预处理:对采集到的拉索振动视频,利用图像预处理算法首先将视频帧转化为灰度图像,并在此基础上对图像进行去噪处理;
5、步骤3:选择模板图片及搜索区域:在视频第一帧中,分别框选模板图片及其搜索区域;
6、步骤4: 亚像素处理:对模板图片和搜索区域进行双线性插值,得到更高分辨率的亚像素级图片;
7、步骤5:目标跟踪:运用最优自适应模板匹配算法跟踪视频中目标的位置,得到其位移时程数据;
8、步骤6: 频谱分析:对位移时程数据进行快速傅里叶变换,得到拉索的各阶自振频率。
9、步骤7:索力识别:将得到的拉索自振频率代入频率-索力公式从而计算拉索的索力。
10、有益效果
11、(1)本发明基于红外光和最优自适应模板匹配算法实现了非接触式的拉索索力测试,相比传统的接触式索力测试方法需要布设大量的传感器或者索力测量装置,本发明显著降低了成本,具有更高的测量效率和精度。
12、(2)本发明采用了基于红外光的图像采集装置,相比传统相机具有更强的穿透性,可以在恶劣天气条件和光照强度弱的条件下拍摄到更加清晰的图像。能够解决现有的机器视觉方法在恶劣天气条件(如雨、雾、雪等)索力测试难度大、准确性差的问题以及在光照强度弱(如夜晚、黑暗环境等)的环境下难以进行索力测试的问题。
13、(3)本发明采用了最优自适应模板匹配算法计算拉索的位移时程曲线,在模板匹配时采用了固定模板和动态模板中的最优模板进行匹配,提高了匹配准确度,从而得到更加精确的位移时程数据,进而可以得到更加精确的自振频率和拉索索力。
14、(4)本发明采用双线性亚像素插值算法,得到更高分辨率的模板图片和搜索区域,在模板匹配时可以得到亚像素级的匹配精度,提高了模板匹配精度。
技术特征:
1.一种基于红外光与最优自适应模板匹配的拉索索力测试方法,其特征为,包括如下步骤:
2.根据权利要求1所述的基于红外光与最优自适应模板匹配的拉索索力测试方法,其特征为:所述步骤1进一步包括如下内容:将一定数量的红外灯靶标安装在拉索上的测点位置,随后将红外滤镜安装在相机上,然后开启红外灯的开关,利用相机采集拉索的振动视频。
3.根据权利要求1所述的基于红外光与最优自适应模板匹配的拉索索力测试方法,其特征为:所述步骤2进一步包括如下内容:将采集到的拉索振动视频导入计算机设备中,利用图像预处理算法将rgb三通道的视频帧图像转化为单通道的灰度图像,以加快后续程序计算的速度,并在此基础上对图像进行去噪处理,减少图像噪声;转化为灰度图的具体实现如下:
4.根据权利要求1所述的基于红外光与最优自适应模板匹配的拉索索力测试方法,其特征为:所述步骤3进一步包括如下内容:经过图像预处理后的视频帧图像中,包含拉索和至少一个在测点位置上的红外靶标灯;测点编号为;在视频的第一帧中框选测点上的红外灯靶标作为模板图片,并对拉索上测点的振动范围进行分析,进而框选该测点的搜索区域,作为后续模板匹配中每一帧的搜索区域。
5.根据权利要求1所述的基于红外光与最优自适应模板匹配的拉索索力测试方法,其特征为:所述步骤4进一步包括如下内容:设表示图像中点的像素值,若已知原图像中点四个相邻整数点位置处的像素值,这四个像素点确定一个矩形,可通过下列式子进行双线性亚像素插值,得到矩阵中任意一个非整数点的像素值;
6.根据权利要求1所述的基于红外光与最优自适应模板匹配的拉索索力测试方法,其特征为:所述步骤5进一步包括如下内容:使用了两个模板进行模板匹配,其中一个为固定模板,即经过亚像素处理之后的模板图片;另一个为动态模板,即选择模板在视频帧匹配的最佳位置作为动态模板;在视频第一帧时,动态模板初始化为固定模板,在此时固定模板与动态模板相同,二者同时对视频第一帧进行模板匹配,得到的匹配位置和匹配结果相同,选择匹配位置的图片对动态图片进行更新;在视频第二帧,运用固定模板和动态模板同时进行匹配,对二者的匹配结果进行对比,选择匹配结果高的匹配位置对动态模板进行更新,后续的视频帧进行类推,能够实现最优自适应的模板匹配,得到更精确的匹配结果,从而得到位移时程数据,并画出位移时程图。
7.根据权利要求1所述的基于红外光与最优自适应模板匹配的拉索索力测试方法,其特征为:所述步骤6进一步包括如下内容:对位移时程数据进行快速傅里叶变换,得到拉索的各阶自振频率。
8.根据权利要求1所述的基于红外光与最优自适应模板匹配的拉索索力测试方法,其特征为:所述步骤7进一步包括如下内容:得到的拉索自振频率代入频率-索力公式从而计算拉索的索力,表示为:
9.一种基于红外光与最优自适应模板匹配的拉索索力测试装置,其特征为:
10.一种桥梁监测装置,其特征在于,包含处理器和存储器;所述存储器中存储有计算机可读指令,所述处理器用于运行所述计算机可读指令,其中,所述计算机可读指令运行时执行权利要求1至8中任意一项所述的方法。
技术总结
一种基于红外光与最优自适应模板匹配的拉索索力测试方法,其特征为,包括采集拉索振动视频;图像预处理;选择模板图片及搜索区域;亚像素处理;目标跟踪;频谱分析;索力识别。本发明解决了现有机器视觉技术在恶劣天气条件索力测试难度大、准确性差的问题以及在光照强度弱的环境下难以进行索力测试的问题;并采用了图像降噪算法减少图像噪声,随后使用双线性插值算法提高图像的分辨率,运用最优自适应模板匹配算法进行目标跟踪,从而得到拉索的位移时程曲线,利用快速傅里叶变换对位移时程数据进行频谱分析,得到拉索的自振频率,根据索力‑频率公式计算索力。
技术研发人员:张勇,刘伯奇,宋楠,吴笑雷,胡强,王凯,严国兵,李林杰,苏力,刘建磊,汪世龙,巴力
受保护的技术使用者:中国铁道科学研究院集团有限公司铁道建筑研究所
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!