一种车辆的位姿确定方法、装置及电子设备与流程
本申请涉及自动驾驶,特别涉及一种车辆的位姿确定方法、装置及电子设备。
背景技术:
1、车库场景的自动驾驶技术得到越来越多的关注,特别是自动泊车和记忆泊车相关技术。无论是自动泊车还是记忆泊车,在地下停车库能得到一个高精度位姿推算估计,对于建图和定位来说都非常重要。
2、当前用于确定车辆位姿的里程计方案有,融合轮速计脉冲和惯性测量单元的里程计(即dr算法),融合视觉特征点和惯性测量单元的视觉惯性里程计(即vio算法),融合雷达和惯性测量单元的雷达惯性里程计(即lio算法)。其中,dr算法通常累计误差比较大,运行一段时间后会出现较大偏差;vio算法通常是基于特征点法来完成,在光线变化时(例如纹理场景)通常会失效;lio算法在长通道或者空旷的高速场景,效果不佳。也就是说,目前确定车辆位姿的方案效果都有各自的不足,精度较低。
技术实现思路
1、本申请提供一种车辆的位姿确定方法、装置及电子设备,用于提高车辆位姿的确定精度。
2、第一方面,本申请实施例提供一种车辆的位姿确定方法,包括:
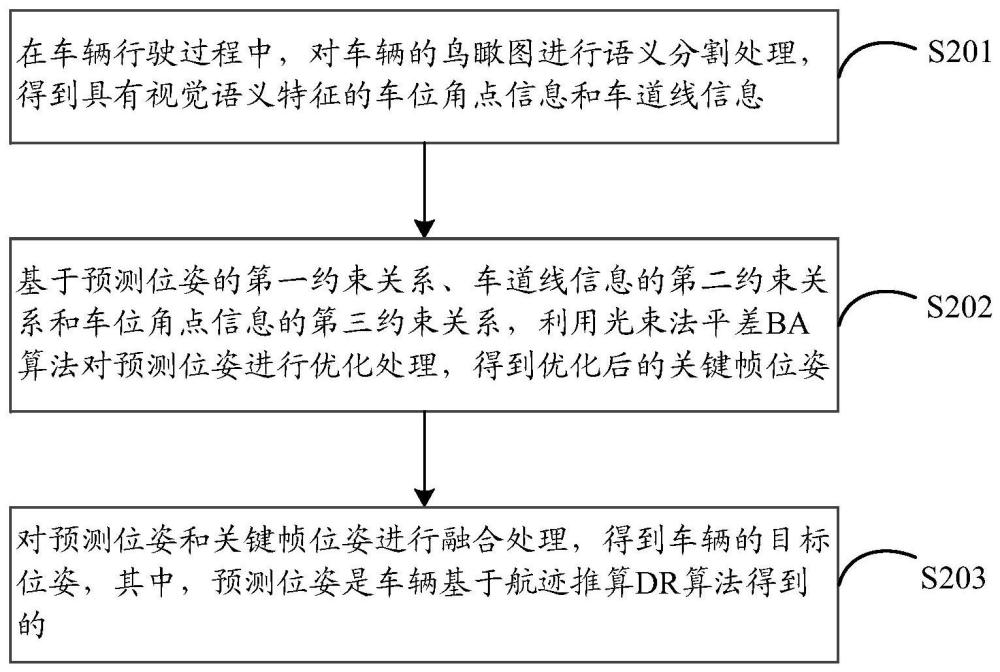
3、在车辆行驶过程中,对所述车辆的鸟瞰图进行语义分割处理,得到具有视觉语义特征的车位角点信息和车道线信息;
4、基于预测位姿的第一约束关系、所述车道线信息的第二约束关系和所述车位角点信息的第三约束关系,利用光束法平差ba算法对预测位姿进行优化处理,得到优化后的关键帧位姿;
5、对所述预测位姿和所述关键帧位姿进行融合处理,得到所述车辆的目标位姿,其中,所述预测位姿是所述车辆基于航迹推算dr算法得到的。
6、在一些实施例中,所述方法还包括:
7、基于预测位姿的第一约束关系、所述车道线信息的第二约束关系和所述车位角点信息的第三约束关系,利用ba算法对ba优化量中z轴的零偏修正量进行优化处理,得到优化后的z轴的零偏修正量;
8、采用dr算法,基于所述优化后的z轴的零偏修正量,得到预测位姿。
9、在一些实施例中,所述第一约束关系包括如下函数:
10、
11、其中,δbz是ba优化量中z轴的零偏修正量,δt是相邻两帧的时间间隔,是相邻两帧的相对预测位姿,(pt+k+1-pt+k)是相邻两帧的相对实际位姿。
12、在一些实施例中,所述第二约束关系包括如下函数:
13、
14、其中,是车道线i在全局坐标系下的法向量,pj是车体坐标系,是车道线i在车体坐标系pj下的法向量,m表示共检测到m条直线,n表示车道线i被n个关键帧观测到。
15、在一些实施例中,所述第三约束关系包括如下函数:
16、
17、其中,是车位i的入口左角点在全局坐标系下的坐标,pj是车体坐标系,是车位i的入口左角点在车体坐标系pj下的坐标,是车位i的入口右角点在全局坐标系下的坐标,是车位i的入口右角点在车体坐标系pj下的坐标,m表示共检测到m个车位,n表示车位i被n个关键帧观测到。
18、在一些实施例中,所述对所述车辆的鸟瞰图进行语义分割处理,包括:
19、利用预构建的卷积神经网络模型对所述车辆的鸟瞰图进行语义分割处理。
20、第二方面,本申请实施例还提供一种车辆的位姿确定装置,包括:
21、第一确定模块,用于在车辆行驶过程中,对所述车辆的鸟瞰图进行语义分割处理,得到具有视觉语义特征的车位角点信息和车道线信息;
22、第二确定模块,用于基于预测位姿的第一约束关系、所述车道线信息的第二约束关系和所述车位角点信息的第三约束关系,利用光束法平差ba算法对预测位姿进行优化处理,得到优化后的关键帧位姿;
23、第三确定模块,用于对所述预测位姿和所述关键帧位姿进行融合处理,得到所述车辆的目标位姿,其中,所述预测位姿是所述车辆基于航迹推算dr算法得到的。
24、在一些实施例中,还包括第四确定模块;
25、所述第四确定模块,用于基于预测位姿的第一约束关系、所述车道线信息的第二约束关系和所述车位角点信息的第三约束关系,利用ba算法对ba优化量中z轴的零偏修正量进行优化处理,得到优化后的z轴的零偏修正量;采用dr算法,基于所述优化后的z轴的零偏修正量,得到预测位姿。
26、在一些实施例中,所述第一约束关系包括如下函数:
27、
28、其中,δbz是ba优化量中z轴的零偏修正量,δt是相邻两帧的时间间隔,是相邻两帧的相对预测位姿,(pt+k+1-pt+k)是相邻两帧的相对实际位姿。
29、在一些实施例中,所述第二约束关系包括如下函数:
30、
31、其中,是车道线i在全局坐标系下的法向量,pj是车体坐标系,是车道线i在车体坐标系pj下的法向量,m表示共检测到m条直线,n表示车道线i被n个关键帧观测到。
32、在一些实施例中,所述第三约束关系包括如下函数:
33、
34、其中,是车位i的入口左角点在全局坐标系下的坐标,pj是车体坐标系,是车位i的入口左角点在车体坐标系pj下的坐标,是车位i的入口右角点在全局坐标系下的坐标,是车位i的入口右角点在车体坐标系pj下的坐标,m表示共检测到m个车位,n表示车位i被n个关键帧观测到。
35、在一些实施例中,所述第一确定模块具体用于:
36、利用预构建的卷积神经网络模型对所述车辆的鸟瞰图进行语义分割处理。
37、第三方面,本申请实施例还提供一种电子设备,包括存储器和处理器;
38、所述存储器用于存储指令;
39、所述处理器用于执行所述存储器存储的指令,当所述处理器执行所述存储器存储的指令时,使得所述电子设备执行如第一方面任一项所述的方法。
40、第四方面,本申请实施例还提供一种计算机存储介质,所述计算机存储介质中存储有指令,当其在计算机上运行时,使得所述计算机执行如第一方面任一项所述的方法。
41、本申请的技术方案至少具有如下有益效果:
42、本申请实施例提供的车辆的位姿确定方法,由于具有视觉语义特征的车位角点信息和车道线信息不易受光线变化的影响,根据这些信息各自的约束关系和dr算法得到的预测位姿的约束关系,利用ba算法优化关键帧位姿,可以将dr算法的高频率特性和ba算法的高精度特性进行融合,从而可以得到精度更高的车辆位姿,提高车辆位姿的确定精度。
技术特征:
1.一种车辆的位姿确定方法,其特征在于,包括:
2.如权利要求1所述的方法,其特征在于,所述方法还包括:
3.如权利要求2所述的方法,其特征在于,所述第一约束关系包括如下函数:δp=[0,0,δbz*δt];
4.如权利要求2所述的方法,其特征在于,所述第二约束关系包括如下函数:
5.如权利要求2所述的方法,其特征在于,所述第三约束关系包括如下函数:
6.如权利要求1-5任一所述的方法,其特征在于,所述对所述车辆的鸟瞰图进行语义分割处理,包括:
7.一种车辆的位姿确定装置,其特征在于,包括:
8.如权利要求7所述的装置,其特征在于,还包括第四确定模块;
9.如权利要求8所述的装置,其特征在于,所述第一约束关系包括如下函数:δp=[0,0,δbz*δt];
10.如权利要求8所述的装置,其特征在于,所述第二约束关系包括如下函数:
11.如权利要求8所述的装置,其特征在于,所述第三约束关系包括如下函数:
12.如权利要求7-11任一所述的装置,其特征在于,所述第一确定模块具体用于:
13.一种电子设备,其特征在于,包括存储器和处理器;
14.一种计算机存储介质,其特征在于,所述计算机存储介质中存储有指令,当其在计算机上运行时,使得所述计算机执行如权利要求1-6任一项所述的方法。
技术总结
本申请提供一种车辆的位姿确定方法、装置及电子设备,该方法包括:在车辆行驶过程中,对车辆的鸟瞰图进行语义分割处理,得到具有视觉语义特征的车位角点信息和车道线信息;基于预测位姿的第一约束关系、车道线信息的第二约束关系和车位角点信息的第三约束关系,利用光束法平差BA算法对预测位姿进行优化处理,得到优化后的关键帧位姿;对预测位姿和关键帧位姿进行融合处理,得到车辆的目标位姿,其中,预测位姿是车辆基于航迹推算DR算法得到的。该方法可以将DR算法的高频率特性和BA算法的高精度特性进行融合,提高车辆位姿的确定精度。
技术研发人员:彭伟,林超龙,赵天坤
受保护的技术使用者:合众新能源汽车股份有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!