一种气缸盖质量检测方法及系统与流程
本发明涉及图像分析,具体涉及一种气缸盖质量检测方法及系统。
背景技术:
1、气缸盖作为发动机的重要组成部分,对气缸盖进行质量检测至关重要。气缸盖在运输过程中的磕碰可能会导致气缸盖质量产生问题,使用存在质量问题的气缸盖进行工作时,会存在安全隐患,因此需要对气缸盖进行质量检测。
2、在对气缸盖进行质量检测时,现有方法根据灰度图像中像素点的灰度值获取分割阈值,通过分割阈值对灰度图像中的像素点进行分割,进而获取气缸盖灰度图像中的连通域,通过分析连通域内像素点的灰度值分布情况去判断气缸盖的质量问题。由于拍摄的气缸盖图像可能会受到光照的影响,使得像素点的灰度值与实际发生偏差,进而导致获得的连通域不准确,根据连通域内像素点的灰度值检测气缸盖的质量不准确。
技术实现思路
1、为了解决由于拍摄的气缸盖图像可能会受到光照的影响,使得像素点的灰度值与实际发生偏差,进而导致获得的连通域不准确,根据连通域内像素点的灰度值检测气缸盖的质量不准确的技术问题,本发明的目的在于提供一种气缸盖质量检测方法及系统,所采用的技术方案具体如下:
2、第一方面,本发明一个实施例提供了一种气缸盖质量检测方法,该方法包括以下步骤:
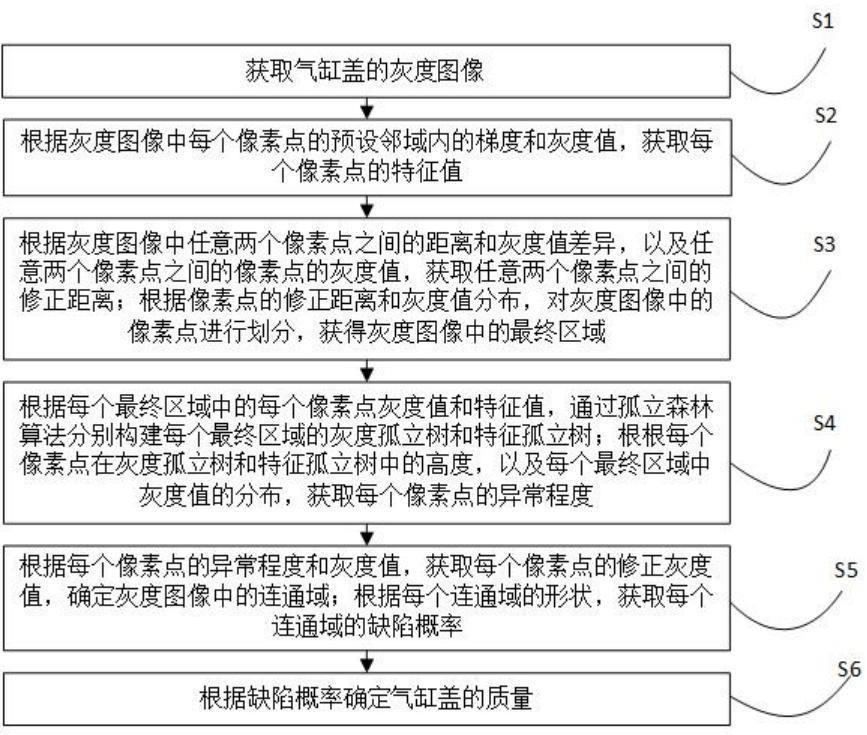
3、获取气缸盖的灰度图像;
4、根据灰度图像中每个像素点的预设邻域内的梯度和灰度值,获取每个像素点的特征值;
5、根据灰度图像中任意两个像素点之间的距离和灰度值差异,以及任意两个像素点之间的像素点的灰度值,获取任意两个像素点之间的修正距离;根据像素点的修正距离和灰度值分布,对灰度图像中的像素点进行划分,获得灰度图像中的最终区域;
6、根据每个最终区域中的每个像素点灰度值和特征值,通过孤立森林算法分别构建每个最终区域的灰度孤立树和特征孤立树;根根每个像素点在灰度孤立树和特征孤立树中的高度,以及每个最终区域中灰度值的分布,获取每个像素点的异常程度;
7、根据每个像素点的异常程度和灰度值,获取每个像素点的修正灰度值,确定灰度图像中的连通域;根据每个连通域的形状,获取每个连通域的缺陷概率;
8、根据缺陷概率确定气缸盖的质量。
9、进一步地,所述根据灰度图像中每个像素点的预设邻域内的梯度和灰度值,获取每个像素点的特征值的方法为:
10、对于灰度图像中的任一个像素点,以该像素点为中心,预设的第一长度为半径,所对应的圆形区域,作为该像素点的预设邻域;
11、获取该像素点在预设邻域内每个方向上的梯度,作为目标梯度;
12、获取每个目标梯度的幅值,当目标梯度的幅值大于预设的幅值阈值时,将对应目标梯度所在的方向,作为该像素点的灰度波动方向;
13、将与每个灰度波动方向顺时针垂直的半径上的邻域像素点,作为该像素点的每个波动方向的参与像素点;
14、获取每个参与像素点的最大梯度幅值对应梯度的方向,作为每个参与像素点的变化趋势方向;
15、根据每个参与像素点的灰度值和变化趋势方向,获取该像素点的特征值。
16、进一步地,所述特征值的计算公式为:
17、;
18、式中,di为第i个像素点的特征值;ni为第i个像素点的灰度波动方向的总数量;m为第一长度;为第k个灰度波动方向的第z个参与像素点与相邻的后一个参与像素点的变化趋势方向的夹角;εk为第k个灰度波动方向的参与像素点的灰度值方差;exp为以自然常数为底数的指数函数;norm为归一化函数。
19、进一步地,所述修正距离的计算公式为:
20、;
21、式中,为第a个像素点和第b个像素点之间的修正距离;la,b为第a个像素点和第b个像素点之间的欧式距离;δga,b为第a个像素点和第b个像素点之间的灰度值差异;εa,b为第a个像素点和第b个像素点之间的像素点的灰度值方差;norm为归一化函数。
22、进一步地,所述根据像素点的修正距离和灰度值分布,对灰度图像中的像素点进行划分,获得灰度图像中的最终区域的方法为:
23、通过k-means聚类算法,根据修正距离对灰度图像中的像素点进行聚类,将获得的每个聚类簇作为灰度图像中的每个初始区域;
24、获取每个初始区域中每个像素点的灰度值均值,作为每个初始区域的整体灰度值;
25、获取任意两个整体灰度值的差异,作为目标差异;
26、当目标差异小于预设的目标差异阈值时,将对应的两个初始区域进行合并;
27、将进行合并处理后的灰度图像中的每个区域,作为灰度图像中的每个最终区域。
28、进一步地,所述异常程度的计算公式为:
29、;
30、式中,为第r个最终区域中第j个像素点的异常程度;εr为第r个最终区域中每个像素点的灰度值方差;为第r个最终区域中第j个像素点在灰度孤立树中的高度;为第r个最终区域中第j个像素点在特征孤立树中的高度;exp为以自然常数为底数的指数函数;norm为归一化函数。
31、进一步地,所述根据每个像素点的异常程度和灰度值,获取每个像素点的修正灰度值,确定灰度图像中的连通域的方法为:
32、将每个像素点的异常程度进行负相关且归一化的结果,作为每个像素点的修正权重;
33、计算每个像素点的修正权重与灰度值的乘积,作为每个像素点的修正灰度值;
34、根据每个像素点的修正灰度值,通过大津法对灰度图像进行二值化处理,获得二值化灰度图像;
35、通过连通域算法获取二值化灰度图像中的连通域,作为灰度图像中的连通域。
36、进一步地,所述缺陷概率的计算公式为:
37、;
38、式中,get为第t个连通域的缺陷概率;lt为第t个连通域的周长;st为第t个连通域的面积;ckt为第t个连通域的长宽比;norm为归一化函数。
39、进一步地,所述根据缺陷概率确定气缸盖的质量的方法为:
40、对于某一气缸盖,获取该气缸盖中的每个连通域的缺陷概率;
41、将最大的缺陷概率,作为该气缸盖的目标缺陷概率;
42、当目标缺陷概率小于或者等于预设的第一缺陷概率阈值时,该气缸盖的质量为良;
43、当目标缺陷概率大于预设的第一缺陷概率阈值和小于预设的第二缺陷概率阈值时,该气缸盖的质量为正常;
44、当目标缺陷概率大于或者等于预设的第二缺陷概率阈值时,该气缸盖的质量为差。
45、第二方面,本发明另一个实施例提供了一种气缸盖质量检测系统,该系统包括:存储器、处理器以及存储在所述存储器中并可在处理器上运行的计算机程序,处理器执行所述计算机程序时,实现上述任意一项方法的步骤。
46、本发明具有如下有益效果:
47、根据灰度图像中每个像素点的预设邻域内的梯度和灰度值,获取每个像素点的特征值,初步判断每个像素点受到的光照影响程度;根据灰度图像中任意两个像素点之间的距离和灰度值差异,以及任意两个像素点之间的像素点的灰度值,获取任意两个像素点之间的修正距离,对每个像素点进行准确的划分,准确获得灰度图像中的最终区域;进而根据每个最终区域中的每个像素点灰度值和特征值,通过孤立森林算法分别构建每个最终区域的灰度孤立树和特征孤立树,避免直接对灰度图像中的所有像素点构建孤立树,导致受光照影响程度不大的像素点被忽略掉,影响缺陷的检测;根根每个像素点在灰度孤立树和特征孤立树中的高度,以及每个最终区域中灰度值的分布,准确获取每个像素点的异常程度;进而根据每个像素点的异常程度和灰度值,获取每个像素点的修正灰度值,降低光照对像素点的灰度值的影响;进而根据每个像素点的修正灰度值,准确确定灰度图像中的连通域;根据每个连通域的形状,获取每个连通域的缺陷概率,准确确定气缸盖的质量,避免存在缺陷的气缸盖被使用,造成安全隐患。
- 还没有人留言评论。精彩留言会获得点赞!