基于域直接映射图神经网络的工业机械手故障诊断方法
本发明涉及工业机械手,具体涉及一种工业机械手故障诊断方法。
背景技术:
1、工业机械手在现代制造业中起着重要的作用,但长时间的运行和各种工作条件可能导致机械手发生故障。及时准确地诊断机械手的故障对于确保生产线的稳定性和效率至关重要。信号分析法和深度学习方法是目前风机轴承故障诊断的两种主要方法,两者通过对机械手传感器输出信号进行分析,可以检测到故障的存在和类型,从而进行及时反馈。
2、信号分析是一种常用的故障诊断方法,然而,传统的信号分析方法在工业机械手故障诊断中存在一些缺点。首先,传感器输出信号通常具有高维度和复杂性,需要大量的计算资源和时间来处理和分析。这导致分析过程耗时较长,无法满足实时性的要求。其次,传统的信号分析方法受限于特定故障模式的训练数据,对于新的故障模式需要重新进行训练和调整参数,导致算法的可迁移性和通用性较差。迁移学习作为一种新兴的机器学习方法,旨在解决数据稀缺和领域间差异的问题,具有在新领域中利用已有知识进行学习和预测的能力。然而,在工业机械手故障诊断中应用迁移学习仍然存在一些挑战。一方面机械手故障诊断领域缺乏大规模标注的故障数据集,这限制了迁移学习算法的性能;另一方面不同类型的机械手和工作环境之间存在差异,这增加了迁移学习的难度。两种方法都对难以保证对故障特征的识别准确可靠。
技术实现思路
1、本发明的目的在于提出一种基于域直接映射图神经网络的工业机械手故障诊断方法,克服了数据分布漂移、故障特征不准确、诊断准确度不够高的问题,为高效可靠的工业机械运维提供有力的技术支持。
2、为达到上述目的,本发明采用以下技术方案:
3、基于域直接映射图神经网络的工业机械手故障诊断方法,包括以下步骤:
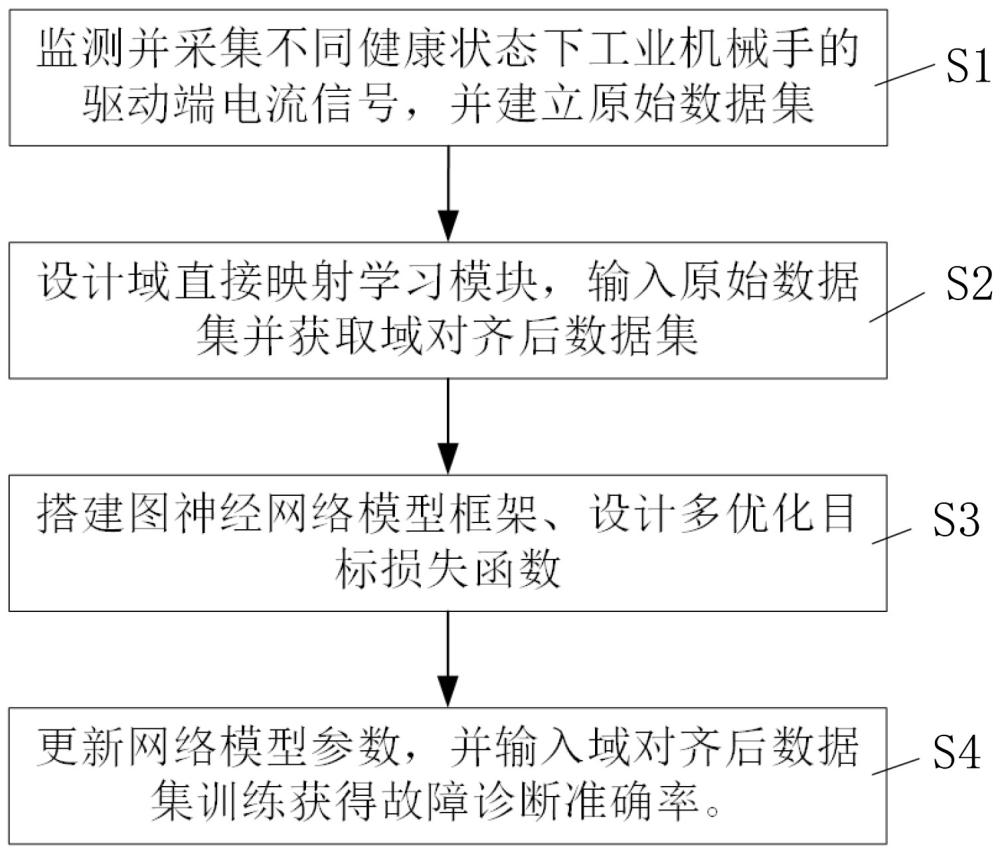
4、s1、监测并采集不同健康状态下工业机械手的驱动端电流信号,并建立原始数据集;
5、s2、设计域直接映射学习模块,输入原始数据集并获取域对齐后数据集;
6、s3、搭建图神经网络模型框架、设计多优化目标损失函数;
7、s4、更新网络模型参数,并输入域对齐后数据集训练获得故障诊断准确率。
8、上述方案进一步是,所述步骤s1具体包括:
9、监测并采集不同健康状态下工业机械手的运行驱动端电流信号,经过归一化处理获取样本并建立原始数据集,原始数据集表示为:,其中t是健康状态。
10、上述方案进一步是,所述步骤s2中所述设计域直接映射学习模块包括:
11、域直接映射学习模块,包括第一次映射、选取关联度最大权重、第二次映射;首先第一次映射将原始数据集按照不同健康状态划分成源域数据、目标域数据,再将源域数据和目标域数据映射到中间域,映射公式为:;
12、其中 x、 y分别是源域数据和目标域数据, a、 b分别是映射权重,其次利用皮尔森相关相似度选取关联度最大权重,皮尔森相关相似度公式为:;
13、其中 c和 d是输入矩阵, c和 d的行和列分别用m和n表示;最后将得到的关联度最大权重进行第二次映射,得到域对齐后数据集:,其中t是健康状态。
14、上述方案进一步是,所述步骤s3具体包括:
15、s31、搭建图神经网络模型框架:首先对域对齐数据集中特征节点进行图生成,图生成包括邻接矩阵 k和特征矩阵 m;通过映射过程增强电流信号,获取的节点特征矩阵公式为:;
16、其中minput是输入矩阵;其次聚合来自三个不同感受野的信息以优化图神经网络,通过聚合不同节点数的信息,不断融合特征,获得更丰富的特征信息,输入图获得的特征表示公式为:;
17、其中h0和h1分别是第一个和第二个学习特征,w0和w1是可训练的权重矩阵。最后连接分类器以获得故障诊断结果;
18、s32、设计多优化目标损失函数:
19、目标损失函数包括分类损失、域对齐损失和结构损失,总的目标损失函数公式为:;
20、其中,lc、lda和lmmd分别代表分类损失、领域对齐损失和结构对齐损失;a和b为权衡参数;t为源样本的标签,分类损失lc公式为:;
21、其中,l(∙,∙)是交叉熵损失函数,c(x)是标签分类器的预测结果;领域对齐损失lda公式为:;
22、其中,和f(x)和f(y)分别表示源样本和目标样本的特征提取结果,样本属于源域或目标域可以通过d(∙)的值来确定,它取值为0和1;e(∙)表示数学期望。结构对齐损失lmmd公式为:;
23、其中,ω是通过将检索到的特征嵌入到rkhs中计算的距离,(∙)是一个非线性映射函数。
24、上述方案进一步是,所述步骤s4具体包括:
25、s41、更新网络模型参数:采用反向传播进行更新参数,反向传播公式为:;
26、其中f、c、d代表特征提取器、标签分类器、邻域鉴别器的参数,为学习率;
27、s42、输入域对齐后数据集训练获得故障诊断准确率:选取不同工况下的工业机械手域对齐后数据集进行模型检验,采用分类诊断准确率指标评估模型的诊断识别精度,其中,诊断准确率指标公式为:;
28、其中yi1为模型预测结果,yi2为真实健康状态标签。
29、本发明与现有技术相比,具有以下有益效果:
30、本发明利用域直接映射学习模块,克服数据漂移问题实现了数据域对齐,提高了模型泛化能力。
31、本发明搭建的图神经网络模型架构、采用了多优化目标损失函数,从而能够快速准确地提取数据特征,提高了工业机械手故障诊断的准确度。
技术特征:
1.基于域直接映射图神经网络的工业机械手故障诊断方法,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的基于域直接映射图神经网络的工业机械手故障诊断方法,其特征在于,所述步骤s1具体包括:
3.根据权利要求1所述的基于域直接映射图神经网络的工业机械手故障诊断方法,其特征在于,所述步骤s2中所述设计域直接映射学习模块包括:
4.根据权利要求1所述的基于域直接映射图神经网络的工业机械手故障诊断方法,其特征在于,所述步骤s3具体包括:
5.根据权利要求1所述的基于域直接映射图神经网络的工业机械手故障诊断方法,其特征在于,所述步骤s4具体包括:
技术总结
本发明公开了一种基于域直接映射图神经网络的工业机械手故障诊断方法,包括以下步骤:监测并采集不同健康状态下工业机械手的驱动端电流信号,并建立原始数据集;设计域直接映射学习模块,输入原始数据集并获取域对齐后数据集;搭建图神经网络模型框架、设计多优化目标损失函数;更新网络模型参数,并输入域对齐后数据集训练获得故障诊断准确率。利用域直接映射学习模块,克服数据漂移问题实现了数据域对齐,提高了模型泛化能力;搭建的图神经网络模型架构、采用了多优化目标损失函数,从而能够快速准确地提取数据特征,提高了工业机械手故障诊断的准确度。
技术研发人员:吴兆乾,韩杰,林伟圻,郭旺,蒋飞
受保护的技术使用者:东莞理工学院
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!