一种基于多跳知识图谱的问答方法、系统、方法及介质与流程
本发明属于知识图谱,涉及一种基于多跳知识图谱的问答方法、系统、方法及介质。
背景技术:
1、供热站设备较多,在供热季设备的稳定运行给千家万户提供了取暖保障。随着社会的发展,室内巡检机器人开始应用于各行各业,通过整合机器人技术、导航定位技术、模式识别技术、多传感器融合技术以及物联网技术等,配备高清摄像头进行实时监控,同时红外成像仪和激光雷达多传感器采集周边环境信息,完成自主定位导航与智能避障功能,能够实现对供热站厂区进行全天时、全方位、全自主智能巡检和安全防护,包括定时自动巡逻、智能读表、管道故障检测等功能,以人工智能先进化手段代替人完成巡检及设备检查工作,及时发现液体泄漏、表盘读取、设备故障、火灾等安全隐患,极大降低运维人员的工作压力与强度,提升供热站安全防护等级。
2、但巡检机器人本身也是复杂的系统,具有感知、控制、定位等能力,通过知识图谱可以将复杂的巡检机器人知识进行管理,在机器人维护和巡检过程中知识的有效管理和知识的重用能够更好的辅助巡检、运维。知识图谱是一种高效且能够有效组织和管理知识的方式,多跳问答的准确性一定程度上决定了知识图谱的准确度。面向巡检机器人的多跳问答为后续知识有效管理、知识重用奠定了基础。
3、然而,由于巡检机器人系统知识的复杂性,面向巡检机器人系统的知识图谱存在着大量的三元组缺失,导致推理失败,即不能对巡检机器人系统领域进行较为准确的实体抽取任务,以选择处最好的实体作为答案输出。
技术实现思路
1、本发明的目的在于克服上述现有技术的缺点,提供了一种基于多跳知识图谱的问答方法、系统、方法及介质,该方法、系统、方法及介质能够对巡检机器人系统领域进行较为准确的实体抽取任务,以选择处最好的实体作为答案输出。
2、为达到上述目的,本发明采用如下技术方案:
3、本发明一方面,本发明提供了一种基于多跳知识图谱的问答方法,包括:
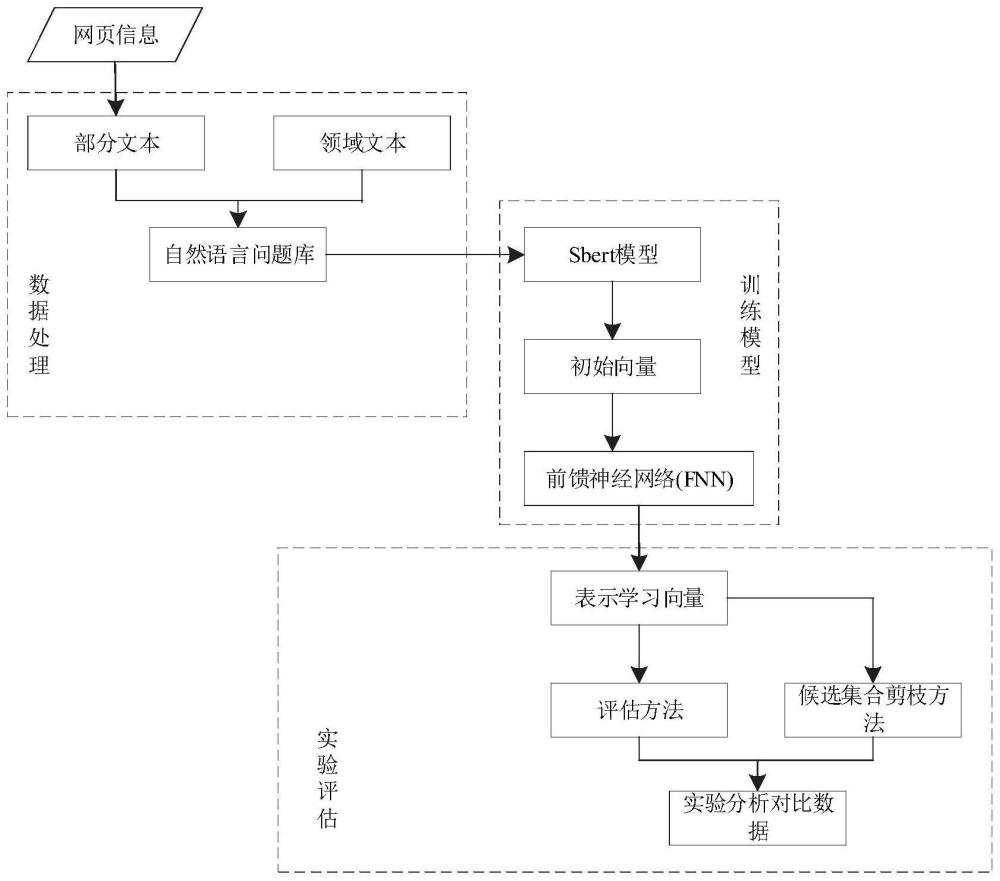
4、1)将待回答问题输入到训练后的sentence-bert模型中,得到多个固定维度的句子初始向量;
5、2)对所述句子表示向量进行标注,将标注后的句子表示向量输入到基于fnn的问题表示学习模型中,得到问句向量;
6、3)获取知识图谱向量表示,根据知识图谱向量表示及步骤2)获得的问句向量,通过评分函数在所有答案候选集合中进行答案选择,以获取答案候选集合;
7、4)对所述答案候选集合,采用候选集合剪枝方法,保留答案候选集合中高概率的实体,再将保留的实体与问题库中的问题实体在知识图谱向量表示中3跳内的实体向量组成新的候选集合,再采用评分方法对所述新的候选集合进行评分,得到多跳知识图谱问答结果。
8、还包括:
9、收集巡检机器人系统领域自然语言问题,构建自然语言问题库,收集巡检机器人系统的知识数据,生成数据结构为三元组结构的巡检机器人系统知识图谱,获得所述知识图谱中实体的描述文本;
10、使用所述自然语言问题库进行sentence-bert模型的训练。
11、获取知识图谱的向量表示的具体过程为:
12、将知识图谱中的三元组进行标记,利用所述实体的描述文本替换知识图谱中所描述的实体,得到新序列,将所述新序列输入到roberta预训练语言模型中,得到知识图谱的向量表示。
13、还包括:
14、获取多固定维度的问句初始向量样本;
15、对所述多固定维度的问句初始向量样本进行标注,再利用标注后的多固定维度的问句初始向量对前馈神经网络fnn进行训练,然后将训练后的前馈神经网络fnn作为基于fnn的问题表示学习模型。
16、所述前馈神经网络fnn通过前向传播和反向传播两种方式完成对初始向量的学习训练。
17、所述评分函数为:
18、score(q,a′)=e(h,q,a′)=||eh+eq-ea′|| (3)
19、其中,score(q,a′)为得分函数,q为自然语言问题,a′为候选答案,e(h,q,a′)为知识图谱融合模型的能量函数的变形,h∈ε为q中的查询实体,eh、eq、ea′为h、q、a′的向量表示。
20、步骤4)的具体过程为:
21、41)设定评分函数s(r,q),所述评分函数s(r,q)为问题向量eq与关系向量er的点积的sigmoid,评分函数s(r,q)为:
22、
23、其中,r为知识图谱中的关系,q为问题,s(r,q)为评分函数的得分,sigmoid为激活函数,为问题向量的转置,er为关系向量,根据式(4)计算指定的问题q与知识图谱中所有关系的评分;
24、42)对步骤41)的计算结果,在所有关系中挑选出得分大于0.5的关系,并以此组成集合r,遍历集合r找到所有关系r相关的三元组(h',r,t'),其中,h',t'表示正确答案实体,将存h',t'入到集合εa中;
25、43)对步骤41)中,从指定的问题q的查询主题实体h出发,找到所有距离出发点3-hop以内的实体,并以此组成集合εb,将εb与εa取并集,并将取并集的结果作为经过剪枝后的候选答案实体集合a';
26、44)对步骤41)的计算结果,使用得分函数score(·)对所有候选答案实体计算得分,再根据得分从小到大对所有候选答案实体进行排序,通过得分函数score(·)候选出候选实体中得分最小的答案实体,并以此作为正确答案,其中,正确答案的向量表示eans为:
27、
28、其中,eans为正确答案的向量表示,a'为所有答案候选集合,arg min为取小值的函数,q为自然语言问题,a′为答案候选集合中的待评分答案;
29、45)将步骤44)得到的正确答案,按照vector2id映射为对应实体的id,并以此作为自然语言形式的正确答案进行输出。
30、本发明二方面,本发明提供了一种基于多跳知识图谱的问答系统,包括:
31、第一获取模块,用于将待回答问题输入到训练后的sentence-bert模型中,得到多个固定维度的句子初始向量;
32、第二获取模块,用于对所述句子表示向量进行标注,将标注后的句子表示向量输入到基于fnn的问题表示学习模型,得到问句向量;
33、第一筛选模块,用于获取知识图谱向量表示,根据知识图谱向量表示及所述问句向量,通过评分函数在所有答案候选集合中进行答案选择,以获取答案候选集合;
34、第二筛选模块,用于对所述答案候选集合,采用候选集合剪枝方法,保留答案候选集合中高概率的实体,再将保留的实体与问题库中的问题实体在知识图谱向量表示中3跳内的实体向量组成新的候选集合,再采用评分方法对所述新的候选集合进行评分,得到多跳知识图谱问答结果。
35、本发明三方面,本发明提供了一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现所述基于多跳知识图谱的问答方法的步骤。
36、本发明四方面,本发明提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现所述基于多跳知识图谱的问答方法的步骤。
37、本发明具有以下有益效果:
38、本发明所述的基于多跳知识图谱的问答方法、系统、方法及介质在具体操作时,利用sentence-bert模型将自然语言问题表示为知识图谱表示向量同样维度的初始向量,再利用基于fnn的问题表示学习模型得到问句向量,最后通过评分方法计算每个候选实体的得分,选择得分最好的实体作为正确答案输出,以优化巡检机器人系统领域进行实体抽取任务的适配性及准确性,选择最好的实体作为答案输出。
- 还没有人留言评论。精彩留言会获得点赞!