一种基于机器人大地图加载方法、系统及介质与流程
本技术涉及地图加载领域,具体而言,涉及一种基于机器人大地图加载方法、系统及介质。
背景技术:
1、现有方案通过读取地图尺寸和位图类型,采取质量压缩、采样率压缩、缩放压缩、颜色格式压缩等方式加载到内存中,通过glide、freso、picasso等第三方优秀的图片加载框架进行大地图的加载,包括压缩法、区域加载等;现有技术的缺点:仅依靠压缩地图的方式减小内存,会导致地图放大后不够清晰,无法在大地图上进行精细的操作,使得机器人在大地图上的定位不准确,巡逻路线不精细;第三方框架确实可以解决精细问题,但是巡逻机器人已有一套完整的地图加载组件,地图上数据很多包括虚拟墙、巡逻点坐标、巡逻路线、激光地图等等,导致直接使用第三方框架无法起到自定义的效果,针对上述问题,目前亟待有效的技术解决方案。
技术实现思路
1、本技术实施例的目的在于提供一种基于机器人大地图加载方法、系统及介质,通过不改变地图控件的前提下,不压缩实现高清加载大地图,使机器人地图绘制的虚拟墙、巡逻点和巡逻路线的坐标更精确。
2、本技术实施例还提供了一种基于机器人大地图加载方法,包括:
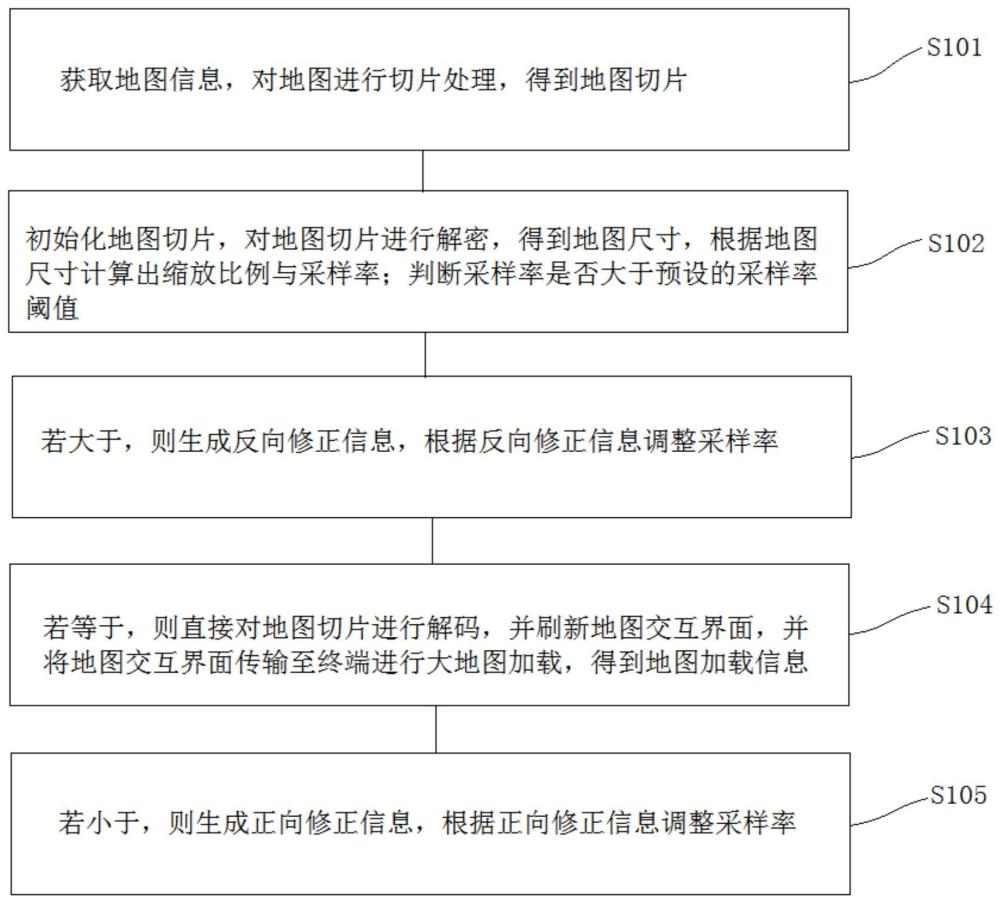
3、获取地图信息,对地图进行切片处理,得到地图切片;
4、初始化地图切片,对地图切片进行解密,得到地图尺寸,根据地图尺寸计算出缩放比例与采样率;
5、判断所述采样率是否大于预设的采样率阈值;
6、若大于,则生成反向修正信息,根据反向修正信息调整采样率;
7、若等于,则直接对地图切片进行解码,并刷新地图交互界面,并将地图交互界面传输至终端进行大地图加载,得到地图加载信息;
8、若小于,则生成正向修正信息,根据正向修正信息调整采样率。
9、可选地,在本技术实施例所述的基于机器人大地图加载方法中,获取地图信息,对地图进行切片处理,得到地图切片,具体包括:
10、获取地图的宽度与高度信息以及控件显示区域的宽度信息与高度信息;
11、获取切片尺寸信息,根据地图的宽度与高度信息以及控件显示区域的宽度信息与高度信息得到切片匹配数量,得到切片个数;
12、将切片进行编号,并将编号完成后的切片数据进行提取,得到切片数据;
13、将切片数据按照预定的方式传输并存储至终端。
14、可选地,在本技术实施例所述的基于机器人大地图加载方法中,获取地图的宽度与高度信息以及控件显示区域的宽度信息与高度信息之后,还包括:
15、获取控件显示区域的覆盖区域,并计算覆盖区域内的切片数量;
16、若覆盖区域内的切片数量为多个时,则获取覆盖的切片编号;
17、获取对应切片编号的切片数据,并对切片数据进行解码,得到解码数据;
18、将未覆盖的切片数据进行加载并回收;
19、根据解码数据进行匹配切片在原始地图中的位置关系;
20、经过缩放与移动调整至控件显示区域的中间区域。
21、可选地,在本技术实施例所述的基于机器人大地图加载方法中,初始化地图切片,对地图切片进行解密,得到地图尺寸,根据地图尺寸计算出缩放比例与采样率,具体包括:
22、下载地图,地图包括图片、虚拟墙与点位坐标;
23、获取控件显示区域的尺寸与图片尺寸,并计算缩放比例;
24、根据缩放比例匹配对应的采样率;
25、不同的缩放比例选择不同的采样率进行解码图片。
26、可选地,在本技术实施例所述的基于机器人大地图加载方法中,若大于,则生成反向修正信息,根据反向修正信息调整采样率,具体包括:
27、获取地图切片的图片信息,并提取图片特征;
28、根据图片特征计算图片信息的像素分辨率;
29、将像素分辨率与预设的分辨率阈值进行比较,得到分辨率偏差;
30、根据分辨率偏差生成反向修正信息,对采样率进行调整。
31、可选地,在本技术实施例所述的基于机器人大地图加载方法中,若等于,则直接对地图切片进行解码,并刷新地图交互界面,并将地图交互界面传输至终端进行大地图加载,得到地图加载信息,具体包括:
32、获取当前采样率,若当前采样率等于1,则对地图切片进行直接解码,
33、解码成功之后,重新刷新地图交互界面,并将地图交互界面储存至终端进行复用;
34、根据当前采样率判断地图切片是否可见;
35、若当前地图切片不可见,则将对应地图切片进行回收;
36、获取当前缩放比例,根据当前的缩放比例,将虚拟墙以及点位坐标转换为地图上的坐标,进行大地图加载。
37、第二方面,本技术实施例提供了一种基于机器人大地图加载系统,该系统包括:存储器及处理器,所述存储器中包括基于机器人大地图加载方法的程序,所述基于机器人大地图加载方法的程序被所述处理器执行时实现以下步骤:
38、获取地图信息,对地图进行切片处理,得到地图切片;
39、初始化地图切片,对地图切片进行解密,得到地图尺寸,根据地图尺寸计算出缩放比例与采样率;
40、判断所述采样率是否大于预设的采样率阈值;
41、若大于,则生成反向修正信息,根据反向修正信息调整采样率;
42、若等于,则直接对地图切片进行解码,并刷新地图交互界面,并将地图交互界面传输至终端进行大地图加载,得到地图加载信息;
43、若小于,则生成正向修正信息,根据正向修正信息调整采样率。
44、可选地,在本技术实施例所述的基于机器人大地图加载系统中,获取地图信息,对地图进行切片处理,得到地图切片,具体包括:
45、获取地图的宽度与高度信息以及控件显示区域的宽度信息与高度信息;
46、获取切片尺寸信息,根据地图的宽度与高度信息以及控件显示区域的宽度信息与高度信息得到切片匹配数量,得到切片个数;
47、将切片进行编号,并将编号完成后的切片数据进行提取,得到切片数据;
48、将切片数据按照预定的方式传输并存储至终端。
49、可选地,在本技术实施例所述的基于机器人大地图加载系统中,获取地图的宽度与高度信息以及控件显示区域的宽度信息与高度信息之后,还包括:
50、获取控件显示区域的覆盖区域,并计算覆盖区域内的切片数量;
51、若覆盖区域内的切片数量为多个时,则获取覆盖的切片编号;
52、获取对应切片编号的切片数据,并对切片数据进行解码,得到解码数据;
53、将未覆盖的切片数据进行加载并回收;
54、根据解码数据进行匹配切片在原始地图中的位置关系;
55、经过缩放与移动调整至控件显示区域的中间区域。
56、第三方面,本技术实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质中包括基于机器人大地图加载方法程序,所述基于机器人大地图加载方法程序被处理器执行时,实现如上述任一项所述的基于机器人大地图加载方法的步骤。
57、由上可知,本技术实施例提供的一种基于机器人大地图加载方法、系统及介质,通过获取地图信息,对地图进行切片处理,得到地图切片;初始化地图切片,对地图切片进行解密,得到地图尺寸,根据地图尺寸计算出缩放比例与采样率;判断所述采样率是否大于预设的采样率阈值;若大于,则生成反向修正信息,根据反向修正信息调整采样率;若等于,则直接对地图切片进行解码,并刷新地图交互界面,并将地图交互界面传输至终端进行大地图加载,得到地图加载信息;若小于,则生成正向修正信息,根据正向修正信息调整采样率;本发明在不改变地图控件的前提下,不压缩实现高清加载大地图,使机器人地图绘制的虚拟墙、巡逻点和巡逻路线的坐标更精确。
- 还没有人留言评论。精彩留言会获得点赞!